[足式机器人]Part2 Dr. CAN学习笔记-Ch01自动控制原理
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-Ch01自动控制原理
1. 开环系统与闭环系统Open/Closed Loop System
1.1 EG1: 烧水与控温水壶

1.2 EG2: 蓄水与最终水位

h
˙
=
q
i
n
A
?
g
h
A
R
\dot{h}=\frac{q_{in}}{A}-\frac{gh}{AR}
h˙=Aqin???ARgh?
设
A
=
1
A=1
A=1. 目标:
h
=
x
→
x
d
h=x\rightarrow x_d
h=x→xd? —— 保持液面高度
x
d
=
C
R
g
,
C
=
x
d
g
R
=
u
,
G
(
s
)
=
1
S
+
g
R
x_d=\frac{CR}{g},C=\frac{x_dg}{R}=u,G\left( s \right) =\frac{1}{S+\frac{g}{R}}
xd?=gCR?,C=Rxd?g?=u,G(s)=S+Rg?1?
1.3 闭环控制系统

X
=
D
G
1
+
H
D
G
V
X=\frac{DG}{1+HDG}V
X=1+HDGDG?V
2. 稳定性分析Stability
2.1 序言

2.2 稳定的分类

2.3 稳定的对象
明确分析对象

e
=
T
a
r
g
e
t
??
?
??
θ
e=Target\,\,-\,\,\theta
e=Target?θ
Does the error converge to zero or not —— error dynamics stable or not
2.4 稳定的系统
Open loop 开环

Closed loop 闭环

EG1:

EG2:

2.5 系统稳定性的讨论


2.6 补充内容——Transfer Function(传递函数) - nonzero Initial Condition(非零初始条件)

3. 燃烧卡路里-系统分析实例
3.1 数学模型


3.2 比例控制 Proprotional Control


4 终值定理和稳态误差Final Value Theorem & Steady State Error



5 比例积分控制器Proportional-Intefral Controller
消除稳态误差——设计新的控制器


6 根轨迹Root locus
6.1 根的作用
G
(
s
)
=
s
+
3
s
2
+
2
s
+
4
G\left( s \right) =\frac{s+3}{s^2+2s+4}
G(s)=s2+2s+4s+3?
Matlab可绘制 riocus(g)
掌握根的变化规律 , 设计控制器,补偿器 : Compentator Lead Lag…
根 —— 极点
- 一阶系统

- 二阶系统


- 三阶系统


6.2 手绘技巧
Matlab可以精确绘制——手绘——掌握根的变化规律——设计控制器
根轨迹的基本形式

根轨迹研究的是: 当
K
K
K从0到
+
∞
+\infty
+∞时,闭环系统根(极点)位置的变化规律
1 + K G ( s ) = 0 , G ( s ) = N ( s ) D ( s ) = ( s ? z 1 ) ( s ? z 2 ) ? ( s ? z m ) ( s ? p 1 ) ( s ? p 2 ) ? ( s ? p n ) 1+KG\left( s \right) =0,G\left( s \right) =\frac{N\left( s \right)}{D\left( s \right)}=\frac{\left( s-z_1 \right) \left( s-z_2 \right) \cdots \left( s-z_{\mathrm{m}} \right)}{\left( s-p_1 \right) \left( s-p_2 \right) \cdots \left( s-p_{\mathrm{n}} \right)} 1+KG(s)=0,G(s)=D(s)N(s)?=(s?p1?)(s?p2?)?(s?pn?)(s?z1?)(s?z2?)?(s?zm?)?
其中,
z
1
?
z
m
z_1\cdots z_{\mathrm{m}}
z1??zm? 为零点 Zeros
⊙
\odot
⊙ ,
p
1
?
p
n
p_1\cdots p_{\mathrm{n}}
p1??pn? 为极点 Poles
×
\times
×
规则1 :共有
n
n
n条根轨迹, 若
n
>
m
n>m
n>m;共有
m
m
m条根轨迹,若
m
>
n
m>n
m>n;
?
max
?
{
m
,
n
}
\Leftarrow \max \left\{ m,n \right\}
?max{m,n}
规则2 :若
m
=
n
m=n
m=n,随着
K
K
K从
0
→
∞
0\rightarrow \infty
0→∞ , 根轨迹从
G
(
s
)
G\left( s \right)
G(s)的极点向零点移动:
1
+
K
G
(
s
)
=
0
?
D
(
s
)
+
K
N
(
s
)
=
0
1+KG\left( s \right) =0\Rightarrow D\left( s \right) +KN\left( s \right) =0
1+KG(s)=0?D(s)+KN(s)=0 ,
K
→
0
K\rightarrow 0
K→0 时
D
(
s
)
=
0
D\left( s \right) =0
D(s)=0(极点);
K
→
∞
K\rightarrow \infty
K→∞ 时
N
(
s
)
=
0
N\left( s \right) =0
N(s)=0 (零点)
规则3:实轴上的根轨迹存在于从右向左第奇数个极点/零点的左边
规则4:若附属跟存在,则一定是共轭的,所以根轨迹通过实轴对称
规则5:若
n
>
m
n>m
n>m , 则有
n
?
m
n-m
n?m个极点指向无穷;若
m
>
n
m>n
m>n , 则有
m
?
n
m-n
m?n条根轨迹从无穷指向零点
规则6:根轨迹延渐近线移动,渐近线与实轴的交点
σ
=
∑
p
?
∑
z
n
?
m
\sigma =\frac{\sum{p}-\sum{z}}{n-m}
σ=n?m∑p?∑z? ,渐近线与实轴的夹角
θ
=
2
q
+
1
n
?
m
π
,
q
=
0
,
1
,
.
.
.
,
n
?
m
?
1
/
m
?
n
?
1
\theta =\frac{2q+1}{n-m}\pi ,q=0,1,...,n-m-1/m-n-1
θ=n?m2q+1?π,q=0,1,...,n?m?1/m?n?1

6.3 分离点/汇合点&根轨迹的几何性质
以 2nd-order system 为例:

Properties of Root locus

7 Lead Compensator超前补偿器(调节根轨迹)

7.1 Plot Rootlocus 绘制根轨迹
G
(
s
)
=
1
s
(
s
+
2
)
G\left( s \right) =\frac{1}{s\left( s+2 \right)}
G(s)=s(s+2)1?

7.2 System Performance 系统表现
输入Input —— δ ( t ) \delta \left( t \right) δ(t) 单位冲激
-
K
K
K 较小时,
p
1
,
p
2
p_1,p_2
p1?,p2? :
x
(
t
)
=
c
1
e
p
1
t
+
c
2
e
p
2
t
,
p
1
<
0
,
p
2
<
0
x\left( t \right) =c_1e^{p_1t}+c_2e^{p_2t},p_1<0,p_2<0
x(t)=c1?ep1?t+c2?ep2?t,p1?<0,p2?<0

-
K
K
K 较大时,根在复平面:
p
1
,
p
2
p_1,p_2
p1?,p2? :
x
(
t
)
=
c
e
?
t
sin
?
ω
n
t
x\left( t \right) =ce^{-t}\sin \omega _{\mathrm{n}}t
x(t)=ce?tsinωn?t - 无论如何改变
K
K
K值,都无法改变收敛速度
-
7.3 改善/加快收敛速度
——改变根轨迹,希望根在
?
2
+
2
3
-2+2\sqrt{3}
?2+23?
G
(
s
)
=
1
s
(
s
+
2
)
G\left( s \right) =\frac{1}{s\left( s+2 \right)}
G(s)=s(s+2)1?
在根轨迹上的点满足:
∠
K
G
(
s
)
=
?
π
\angle KG\left( s \right) =-\pi
∠KG(s)=?π (零点到根的夹角和 - 极点到根的夹角和)
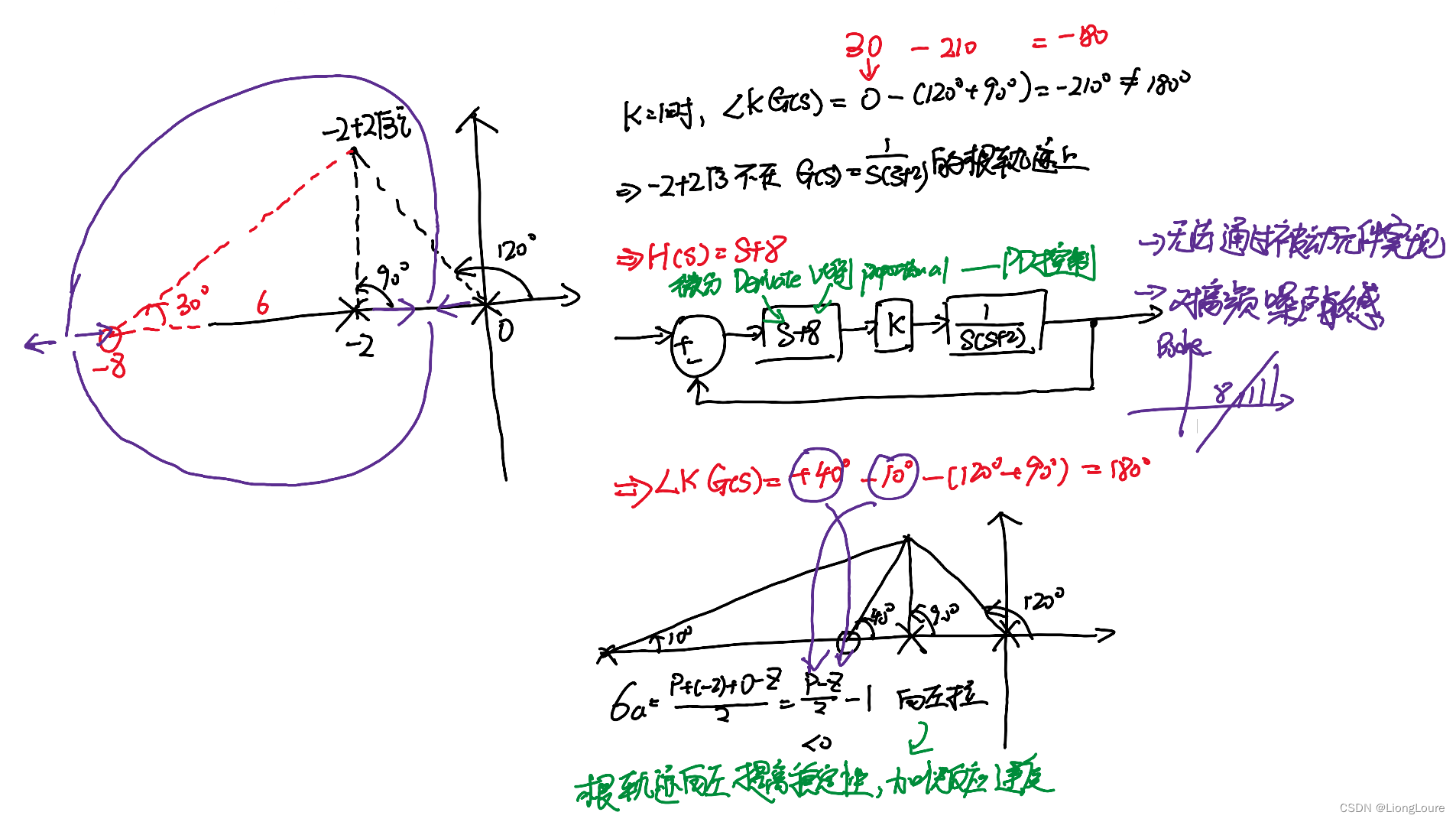
7.4 超前补偿器 Lead Comperastor
H
(
s
)
=
s
?
z
s
?
p
,
∥
z
∥
<
∥
p
∥
H\left( s \right) =\frac{s-z}{s-p},\left\| z \right\| <\left\| p \right\|
H(s)=s?ps?z?,∥z∥<∥p∥

8 Lag Compensator滞后补偿器
从稳态误差入手(steady state Error)

误差 Error :
E
(
s
)
=
R
(
s
)
?
X
(
s
)
=
R
(
s
)
?
E
(
s
)
?
K
G
(
s
)
?
E
(
s
)
(
1
+
K
G
(
s
)
)
=
R
(
s
)
?
E
(
s
)
=
1
1
+
K
G
(
s
)
R
(
s
)
=
R
(
s
)
1
1
+
K
N
(
s
)
D
(
s
)
=
1
s
1
1
+
K
N
(
s
)
D
(
s
)
E\left( s \right) =R\left( s \right) -X\left( s \right) =R\left( s \right) -E\left( s \right) \cdot KG\left( s \right) \Rightarrow E\left( s \right) \left( 1+KG\left( s \right) \right) =R\left( s \right) \Rightarrow E\left( s \right) =\frac{1}{1+KG\left( s \right)}R\left( s \right) =R\left( s \right) \frac{1}{1+K\frac{N\left( s \right)}{D\left( s \right)}}=\frac{1}{s}\frac{1}{1+K\frac{N\left( s \right)}{D\left( s \right)}}
E(s)=R(s)?X(s)=R(s)?E(s)?KG(s)?E(s)(1+KG(s))=R(s)?E(s)=1+KG(s)1?R(s)=R(s)1+KD(s)N(s)?1?=s1?1+KD(s)N(s)?1?
单位阶跃unit step :
R
(
s
)
=
1
s
R\left( s \right) =\frac{1}{s}
R(s)=s1?
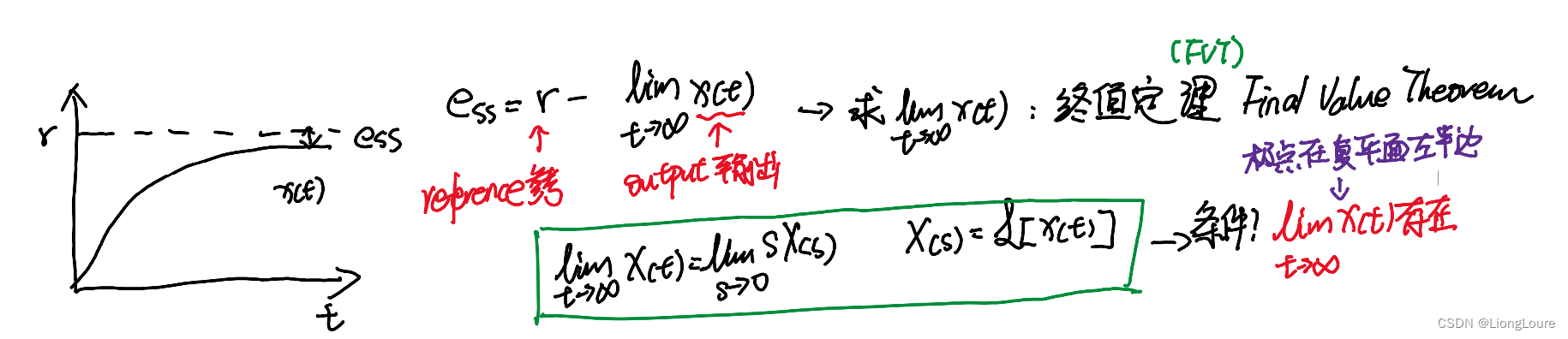
稳态误差Steady State Error——FVT终值定理
e
s
s
=
lim
?
t
→
∞
e
(
t
)
=
lim
?
s
→
o
s
E
(
s
)
=
lim
?
s
→
o
s
?
1
s
1
1
+
K
N
(
s
)
D
(
s
)
=
1
1
+
K
N
(
0
)
D
(
0
)
=
D
(
0
)
D
(
0
)
+
K
N
(
0
)
ess=\underset{t\rightarrow \infty}{\lim}e\left( t \right) =\underset{s\rightarrow o}{\lim}sE\left( s \right) =\underset{s\rightarrow o}{\lim}s\cdot \frac{1}{s}\frac{1}{1+K\frac{N\left( s \right)}{D\left( s \right)}}=\frac{1}{1+K\frac{N\left( 0 \right)}{D\left( 0 \right)}}=\frac{D\left( 0 \right)}{D\left( 0 \right) +KN\left( 0 \right)}
ess=t→∞lim?e(t)=s→olim?sE(s)=s→olim?s?s1?1+KD(s)N(s)?1?=1+KD(0)N(0)?1?=D(0)+KN(0)D(0)?


9 PID控制器
P —— Proportional
I —— Integral
D —— Derivative
- 当前误差/过去误差/误差的变化趋势

- K p ? e K_{\mathrm{p}}\cdot e Kp??e:比例增益——当前误差
- K I ? ∫ e d t K_{\mathrm{I}}\cdot \int{e}dt KI??∫edt:积分增益——过去误差-积累
-
K
D
?
d
e
d
t
K_{\mathrm{D}}\cdot \frac{\mathrm{d}e}{\mathrm{d}t}
KD??dtde? :微分增益——变化趋势 (对噪音敏感)
L [ u ] = L [ K P ? e + K I ? ∫ e d t + K D ? d e d t ] ? U ( s ) = ( K P + K I 1 s + K D s ) ? E ( s ) \mathcal{L} \left[ u \right] =\mathcal{L} \left[ K_{\mathrm{P}}\cdot e+K_{\mathrm{I}}\cdot \int{e}\mathrm{d}t+K_{\mathrm{D}}\cdot \frac{\mathrm{d}e}{\mathrm{d}t} \right] \Rightarrow U\left( s \right) =\left( K_{\mathrm{P}}+K_{\mathrm{I}}\frac{1}{s}+K_{\mathrm{D}}s \right) \cdot E\left( s \right) L[u]=L[KP??e+KI??∫edt+KD??dtde?]?U(s)=(KP?+KI?s1?+KD?s)?E(s)
PID
PD控制:提高稳定性,改善瞬态
PI控制:改善稳态误差
10 奈奎斯特稳定性判据-Nyquist Stability Criterion


Cauchy’s Argument Priciple 柯西幅角原理

结论: s s s平面内顺时针画一条闭合曲线 A A A, B B B曲线是 A A A通过 F ( s ) F(s) F(s)后在 F ( s ) F(s) F(s)平面上的映射, A A A曲线每包含一个 F ( s ) F(s) F(s)的零点(极点), B B B曲线就绕 ( 0 , 0 ) (0,0) (0,0)点顺时针(逆时针)一圈

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Mybatis 24_使用Mapper组件操作数据库 项目4MapperTest
- 论文阅读:Vary论文阅读笔记
- 蓝桥杯官网填空题(最小权值)
- Java中的集合和实现类
- springboot实现netty的websocket服务端与客户端
- C++从bing采集各行业的企业官网信息
- 第一届能源电子产业创新大赛太阳能光伏赛道决赛及颁奖仪式在宜宾成功举办
- 栈|数据结构|C语言|详细讲解|代码实现
- [ToolsChain] 关于cmake 编译时候编译器寻找路径问题,两种解决即使findpackage也提示找不到头文件或库的办法
- SDCMS靶场通过