ros2机器人常规控制流程
发布时间:2023年12月20日
-
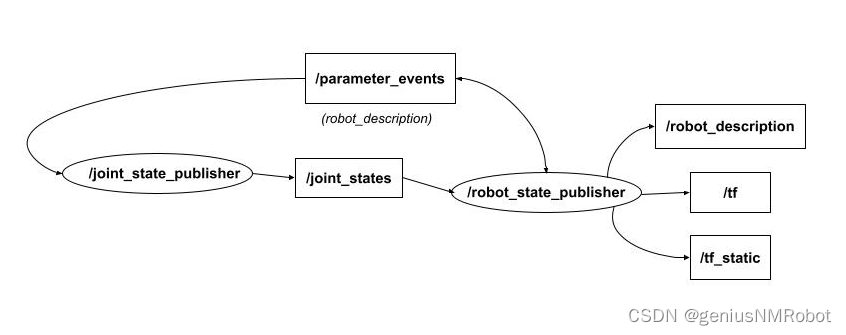
The?joint_state_publisher?reads the?
robot_description?parameter from the parameter server, finds all of the non-fixed joints and publishes a?JointState?message with all those joints defined.也就是说如果我们不需要控制机器人运动,只需要一个节点就可以了:/robot_state_publisher;根本用不到3个节点joint_state_publisher_gui = Node( package='joint_state_publisher_gui', executable='joint_state_publisher_gui', name='joint_state_publisher_gui', arguments=[sdf_file], output=['screen'] ) -
Visualize in RViz and with the help of the?
joint_state_publisher_gui, configure your robot model by adjusting joint states and poses using the slider.
See?documentation?for node API. This functionality is useful during initial development of the model. At this point we have achieved the first aim defined in?Setup.
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135100257
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!