STM32定时器之输入捕获实验和PWM控制呼吸灯实验
发布时间:2024年01月16日
输入捕获
输入捕获功能框图
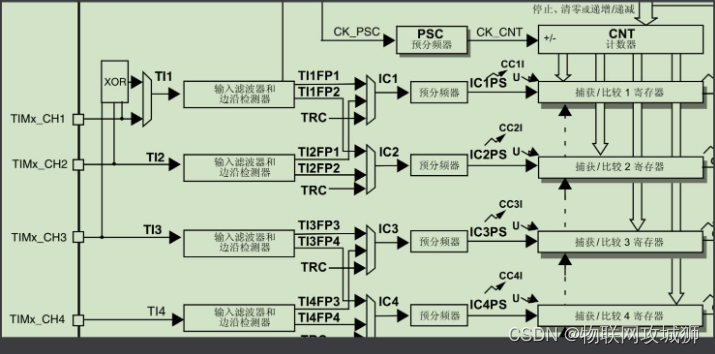
?输入捕获可以对输入的信号的上升沿,下降沿或者双边沿进行捕获,常用来测量输入信号的脉宽和频率
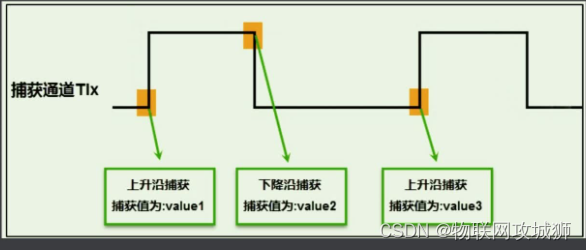
输入捕获应用
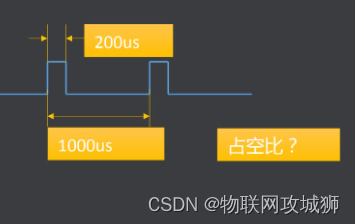
?输入捕获模式可以用来测量频率或者电平持续的时间。
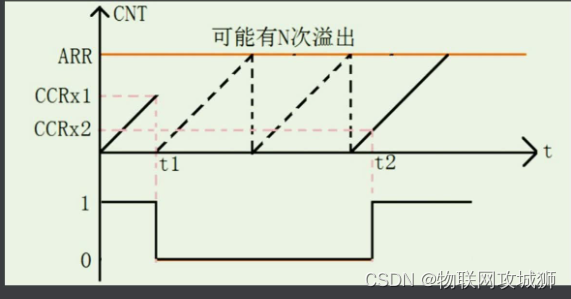
输入捕获测电平持续的时间
?输入捕获测量低电平举例
输入捕获实验
?实验要求:
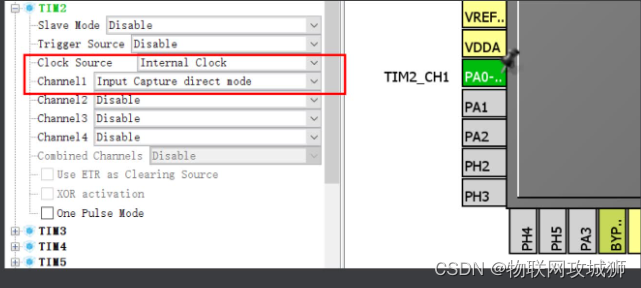
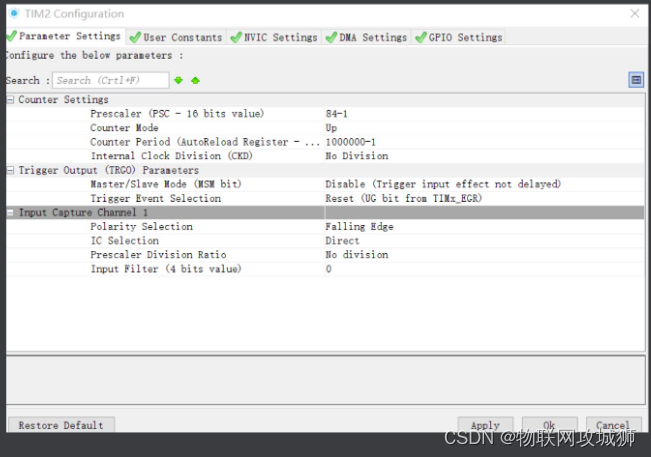
利用定时器2的输入捕获功能测量按下KEY6键后低电平持续的时间
CubeMX配置
关键功能函数说明
__HAL_TIM_DISABLE(&htim2);//关闭定时器
__HAL_TIM_SET_COUNTER(&htim2,0);//设置计数器的值为0
TIM_RESET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1);//清除原来的设置
TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);//设置为上沿捕获
__HAL_TIM_ENABLE(&htim2);//使能定时器PWM控制呼吸灯实验
PWM概念
?PWM(Pulse Width Modulation):脉冲宽度调制
?占空比:就是输出的PWM中,高电平保持的时间 与该PWM的时钟周期的时间之比
PWM应用
?????????它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
?常见应用有:电机控制,DAC输出等
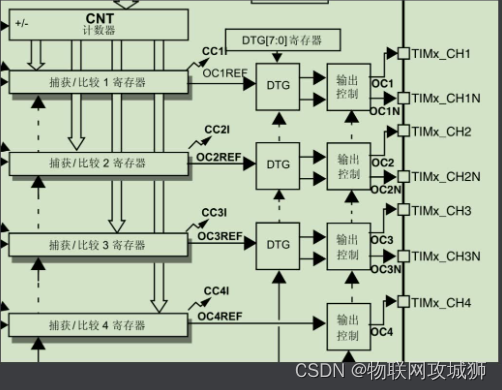
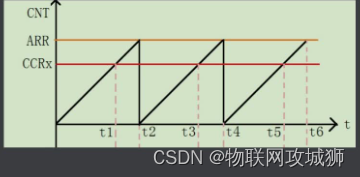
输出比较功能框图
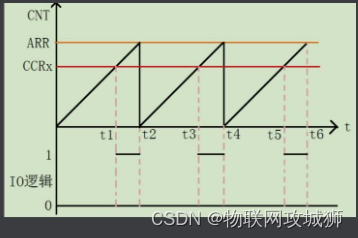
?输出比较就是通过定时器的计数比较控制外部引脚对外输出高低电平
?比较输出有很多种模式,其中PWM模式是输出比较中使用的最多的模式。
STM32-PWM模式
?PWM输出模式

?PWM输出极性
1、高电平有效
2、低电平有效
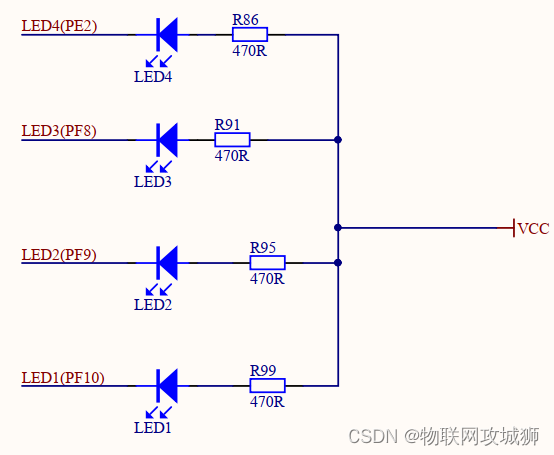
STM32-PWM呼吸灯实验
?实验: 利用通用定时器TIM11的通道1,实现PWM呼吸灯效果
Cubemx配置
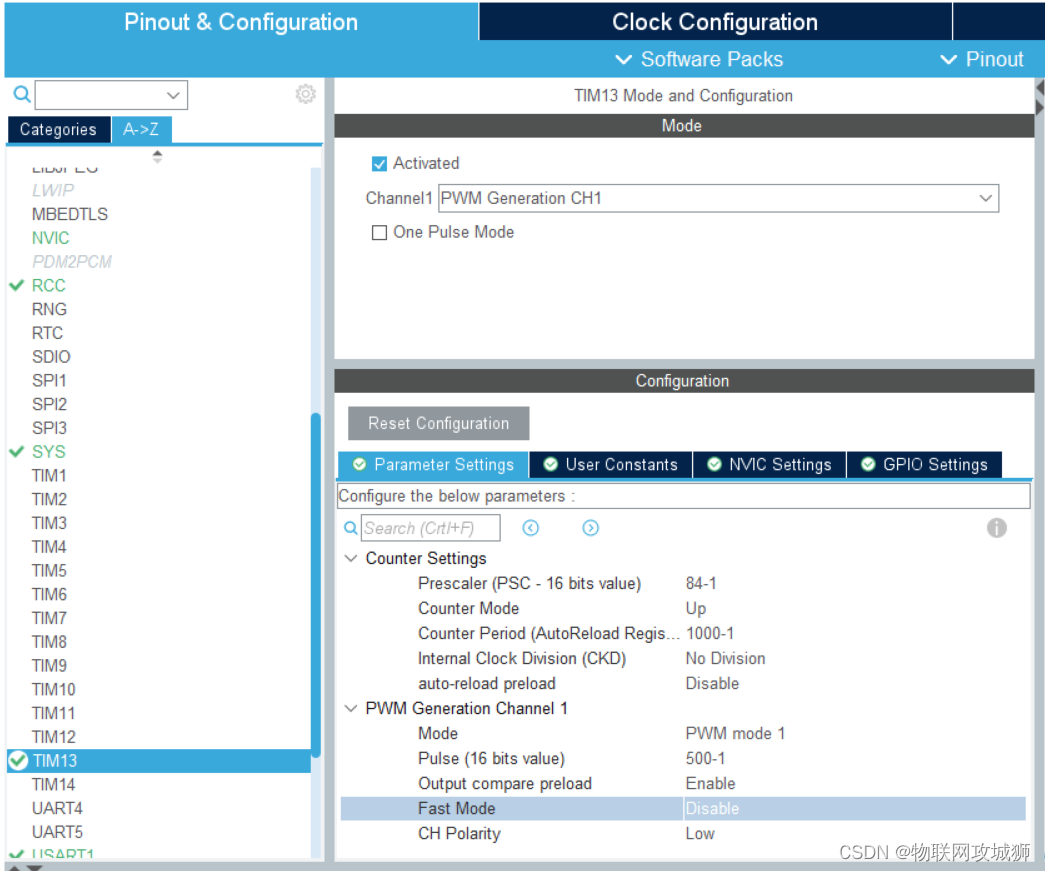
打开PWM使能
HAL_TIM_PWM_Start(&htim13, TIM_CHANNEL_1); int compare = 0;
uint8_t dir = 0;
while (1)
{
if(!dir){
compare += 10;
if(compare >= 1000){
compare = 1000-1;
dir = 1;
}
}
else{
compare -= 10;
if(compare <= 0){
compare = 0;
dir = 0;
}
}
TIM13_Set_Compare(compare);
HAL_Delay(20);
}
文章来源:https://blog.csdn.net/weixin_72238916/article/details/135610500
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- C++入门学习(十)如何显示浮点数的完整形态
- App加固:不同类型和费用对比
- deepfacelive实时换脸教程(2024最新版)
- Kubernetes那点事儿——配置存储:ConfigMap、Secret
- Oracle架构_数据库底层原理、机制 (授人以渔)
- 背刺打工人,被骂上热搜的她挺冤的
- VR渲染器怎么用之自适应图像采样器,可解决渲染黑图问题
- 【ASP.NET Core 基础知识】--MVC框架--Models和数据绑定
- 40.@Autowired和@Resource之间的区别
- 【CVE-2022-22733漏洞复现】