项目,,,
发布时间:2023年12月20日
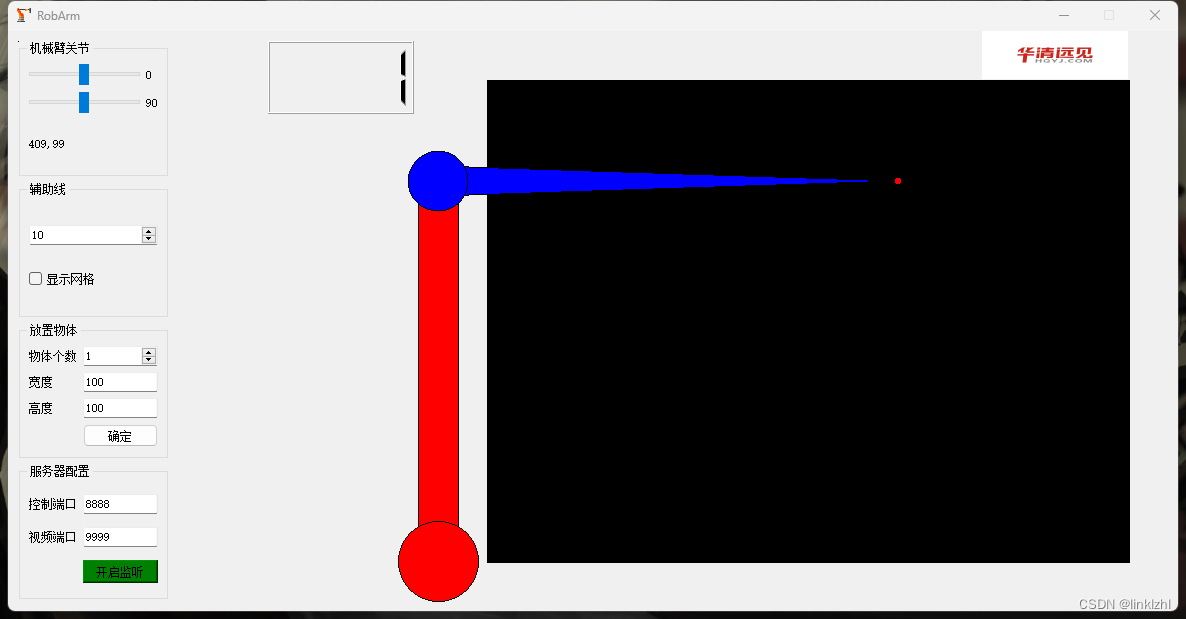
机械臂
include <myhead.h>
#define PORT 8888
#define IP "192.168.125.160"
int main(int argc, const char *argv[])
{
int cfd=-1;
if((cfd=socket(AF_INET,SOCK_STREAM,0))==-1)
{
perror("socket error");
return -1;
}
struct sockaddr_in sin;
sin.sin_family=AF_INET;
sin.sin_port=htons(PORT);
sin.sin_addr.s_addr=inet_addr(IP);
socklen_t len1=sizeof(sin);
if(connect(cfd,(struct sockaddr*)&sin,len1)==-1)
{
perror("connect error");
return -1;
}
puts("连接成功");
char rbuf[5]={0xff,0x02,0x00,0x00,0xff};
unsigned char bbuf[5]={0xff,0x02,0x01,0x00,0xff};
char jj=0;
while(1)
{
jj=getchar();
getchar();
if(jj=='q'||jj=='Q')
break;
switch(jj)
{
case 'W':
case 'w':
{
rbuf[3]+=10;
if(rbuf[3]>=90)
{
rbuf[3]=90;
}
send(cfd,rbuf,sizeof(rbuf),0);
break;
}
case 'S':
case 's':
{
rbuf[3]-=10;
if(rbuf[3]<=-90)
{
rbuf[3]=-90;
}
send(cfd,rbuf,sizeof(rbuf),0);
break;
}
case 'A':
case 'a':
{
bbuf[3]+=10;
if(bbuf[3]>=180)
{
bbuf[3]=180;
}
send(cfd,bbuf,sizeof(bbuf),0);
break;
}
case 'D':
case 'd':
{
bbuf[3]-=10;
if(bbuf[3]<=0)
{
bbuf[3]=0;
}
send(cfd,bbuf,sizeof(bbuf),0);
break;
}
default:
{
printf("请重新输入\n");
break;
}
}
}
close(cfd);
return 0;
}
文章来源:https://blog.csdn.net/m0_64059184/article/details/135071441
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 小米手机游戏中通过xposed edge pro,自动设置拦截所有电话!
- 【操作系统】同步和互斥详细讲解(算法+源码)
- 征途如何用UE修改脚本配置
- C语言中的goto语句详解与使用方法
- 关于“Python”的核心知识点整理大全64
- What does ‘wc -l‘ do?
- Java选课排课系统(源码+开题)
- 算法-动态规划
- 【华为数据之道学习笔记】8-4 数据质量度量运作机制
- 【Android 13】使用Android Studio调试系统应用之Settings移植(三):构建settingsLib项目目录