HDRplus ——简述(一)
发布时间:2024年01月18日
HDR plus——简述(一)
论文网站:http://www.hdrplusdata.org/
摘要
手机摄像头动态范围受限的原因:
| 描述 | |
|---|---|
| 光圈 | 光圈小,限制收集光子的数目,暗光下图像具有噪声 |
| 像素 | 像素小,限制每个像素可以存储的电子的数目,限制动态范围 |
本文对动态范围的优化:提出pipeline系统,能够捕捉、对齐、合并一个burst的画面,减少噪声,增加动态范围。
系统有几个使得系统更鲁棒、更有效的关键特性:
| 关键特性 | 描述 |
|---|---|
| 不使用包围曝光 | 连续低曝光,对齐更加鲁棒,且避免blow out。merge后的图片具有清晰的阴影和高bit depth,可以应用标准的HDR tone mapping方法 |
| 处理bayer raw而不是RGB或YUV | 每个像素更多的bits,规避ISP不需要的tone mapping和空间去噪 |
| 混合2D/3Dwiener滤波 | 基于FFT对齐算法,混合2D/3Dwiener滤波 |
1 介绍
拍摄场景会影响照片质量:
| 拍摄场景 | 问题 | 解决办法 |
|---|---|---|
| 室内或夜间 | 场景光线不足 | 应用数字或模拟增益,放大噪声 延长曝光时间,由于相机抖动或主体运动导致运动模糊 |
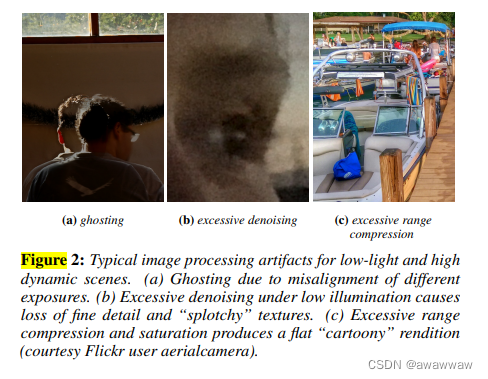
| 白天拍摄高动态照片 | 为了避免高光blowing out,会选择减少曝光时间,阴影区域的光线不足 | 阴影区域可以使用local tone mapping 来增亮,但同时放大了噪声 |
光线不足,影响高动态效果,获得更多曝光的方法如下:
| 方法 | 限制 |
|---|---|
| 大光圈镜头 | 手机受到厚度限制,很难把光圈做大。同时手机受到功率限制,使得通过增加相机数量来创建合成光圈具有挑战性 |
| 光学图像防抖 | 光学防抖可以延长曝光时间,同时最大限度减少相机的抖动模糊,但不能控制被摄物体运动引起的运动模糊 |
| 包围曝光 | 包围曝光进行图像融合,融合后的图像的不同部分代表不同时间的场景,很难实现单一的自一致构图。由于难以对齐在不同时间捕获的图像,不正确融合引起的最常见的伪影是重影,牺牲了细节,使得精确地去马赛克变得困难 |
| 闪光灯 | 闪光灯是最不受欢迎的选择,增加了光线,但会改变场景,有人解决了这个问题,但不够鲁棒 |
HDR+描述了一个相机系统,设计这样的相机系统考虑了以下原则:
| 设计原则 | 描述 |
|---|---|
| 即时 | 短时间内生成一张图片,显示在相机上 |
| 自动 | 该方法需要无参数且全自动。摄影师不需要知道捕捉策略、图像处理策略,也能得到更好的照片 |
| 自然 | 我们拍摄的照片需要忠实于现场的面貌。因此,在高动态范围下, 我们需要限制局部色调映射的数量,避免出现卡通或超现实主义的图像。在光线非常弱的场景,我们不能使图像太亮以至于改变明显的照度或暴露过多的噪声 |
| 保守 | 它需要能作为默认的拍照模式使用。这意味着所产生的照片必须不包含人工制品,并且必须始终至少与传统照片一样好。而且,在极端情形下,它必须逐渐退化为普通照片。 |
根据以上设计原则,产生以下设计决策:
| 描述 | 问题与解决 | |
|---|---|---|
| 用相同的低曝光连拍 | 由于不同程度的噪声和运动模糊,小的曝光变化可能会影响对齐,大的变化可能会导致局部对齐不可能。我们选择低曝光来避免blowing out,来捕捉更多的动态范围。选择更短的曝光时间,减轻相机抖动模糊 | 更短的曝光会加重噪点,可以通过align、merge抵消 |
| 替代帧合并到参考帧 | 一个图像为参考帧,其他替代帧对齐合并到这个帧。合并多帧,生成中间图像,具有更高的位宽、更少的噪声、更高的动态范围。 | 为了降低计算复杂度,只从每个替代帧中合并一个patch |
2 capture和processing概述
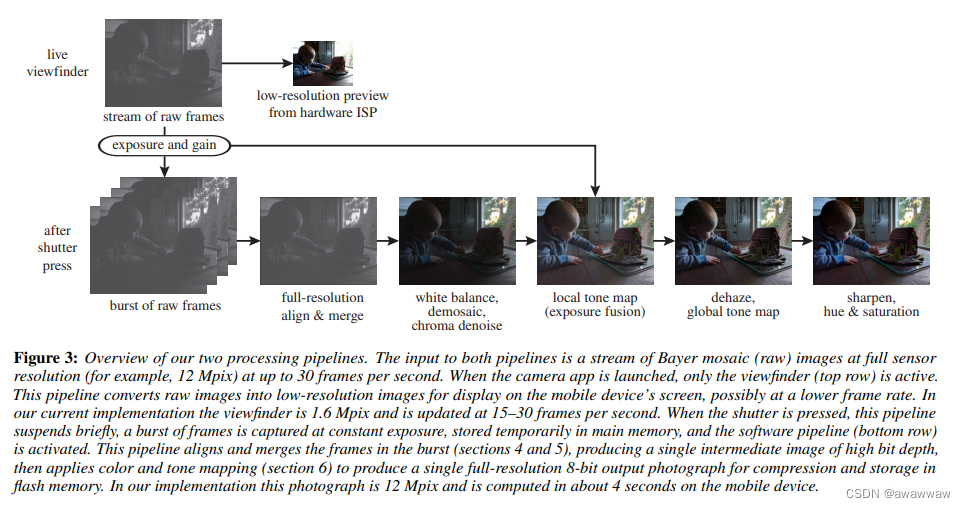
图三总结了capture 和 processing 系统:
- 实时pipeline 生成连续低分辨率取景器流,由SoC的ISP计算,节能;
- 非实时pipeline 生成单个高分辨率图像,SoC的AP运行的软件计算。
所见非所得:ISP的图像看起来与AP软件计算出来的图像不同。
使用RAW图的优点:
| 优点 | 描述 |
|---|---|
| 增加动态范围 | 原始图像中的像素通常是10位,而移动isp产生的YUV(或RGB)像素通常是8位。实际的优势是小于2位,因为raw是线性的,YUV已经有了伽马曲线,但它是不可忽略的。 |
| 线性度 | 在减去黑电平偏移后,原始图像与场景亮度成正比,而isp输出的图像包括非线性色调映射。线性度可以让我们准确地模拟传感器噪声,这使得对准和合并更可靠,也使自动曝光更容易。 |
| 可移植性 | 合并由ISP生成的图像需要建模和反转其处理,这是专有的和场景相关的[Kim等人。2012]。通过从原始图像开始,我们可以省略这些步骤,这使得将我们的系统移植到新相机更容易。 |
我们的对齐和合并算法在RAW图上操作的,去马赛克步骤只需要在单个合并图像上执行一次,而不是在连续的每一帧上执行一次。
文章来源:https://blog.csdn.net/awawwaw/article/details/135533770
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- ROS学习笔记10——自定义源文件调用
- <sa8650>sa8650 CDT-之-针对SA8650 LeMans芯片组SP的快速指南
- Unity 一文掌握使用AddListener方法为组件事件添加监听器的方法
- “哄女友挑战”上线即爆火,两天烧掉 10 亿 token,AI 已通关丨 RTE 开发者日报 Vol.133
- 鸿蒙 - arkTs:状态管理
- PSoc62?开发板之i2c通信
- Unity中URP下实现深度贴花
- HackTheBox-LoveTok
- CSS 文字弹跳效果
- 解决MySQL8.0本地服务器连接不上的问题