模式识别与机器学习-无监督学习-聚类
谨以此博客作为复习期间的记录
监督学习&无监督学习
监督学习和无监督学习是机器学习中两种基本的学习范式。
-
监督学习:
- 定义:监督学习是一种机器学习范式,在这种范式中,模型通过已标记的训练数据进行训练,每个训练样本都有一个标签或目标值。
- 特点:模型在学习过程中使用输入数据与其对应的已知输出(标签或目标值)之间的关系,目的是学习从输入到输出的映射关系,以便对新的未知数据做出准确的预测或分类。
- 优点:
- 可以利用已知的标签信息来进行精确的预测或分类。
- 在训练过程中可以评估模型的性能,并进行调整和改进。
- 适用于大多数真实世界的问题,如图像识别、语音识别、自然语言处理等。
- 缺点:
- 需要大量标记好的训练数据,数据标记成本高。
- 对于某些问题,标签数据可能不容易获得或标记。
-
无监督学习:
- 定义:无监督学习是一种机器学习方法,其中模型根据未标记的数据进行学习,没有对应的目标输出。
- 特点:在无监督学习中,模型试图从数据中发现隐藏的模式、结构或特征,而不需要预先定义的输出标签。
- 优点:
- 可以发现数据中的潜在结构、关联和规律,有助于理解数据本身。
- 适用于数据探索和降维等任务。
- 不需要标签,因此不受标签获取成本的影响。
- 缺点:
- 对于一些任务,无法直接量化或验证模型学到的信息。
- 在训练过程中难以衡量模型的性能。
K-means
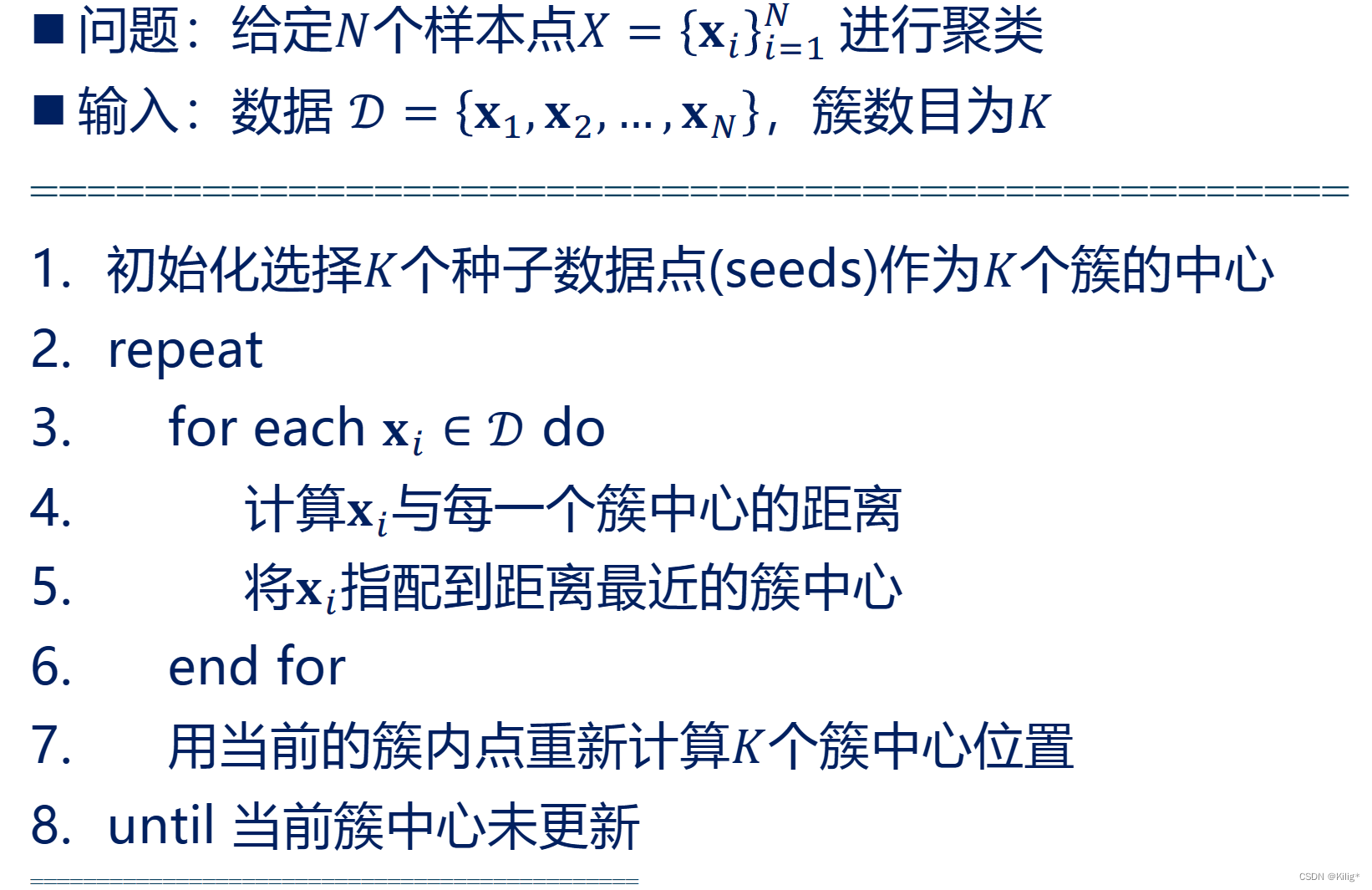
K-means聚类的优点:
- 简单快速:K-means是一种直观且易于实现的聚类算法,计算效率高,适用于大规模数据集。
- 可扩展性:对于大规模数据,K-means算法具有良好的可扩展性和高效性。
- 对高斯分布接近的簇效果较好:当簇近似服从高斯分布时,K-means算法的聚类效果较好。
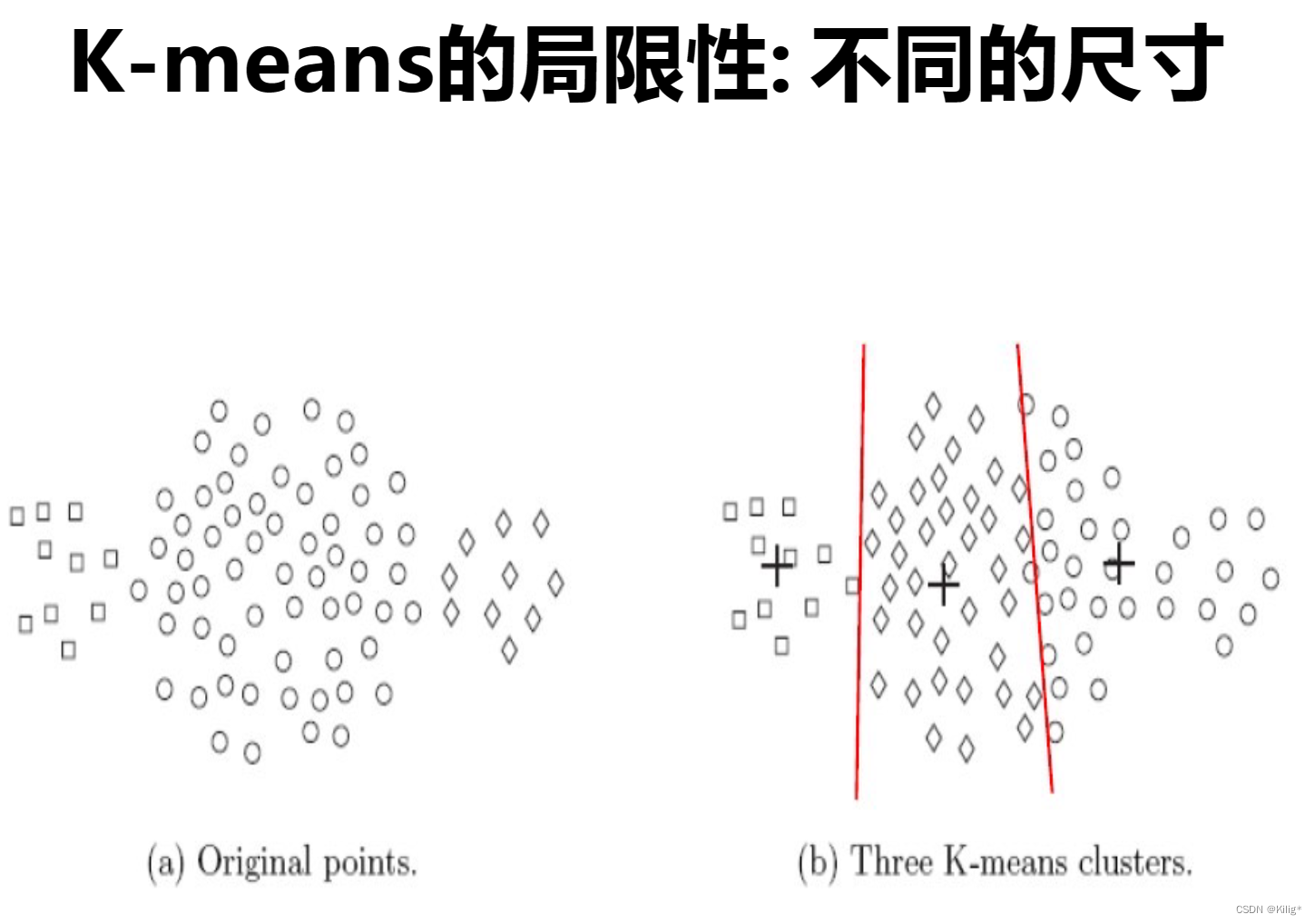
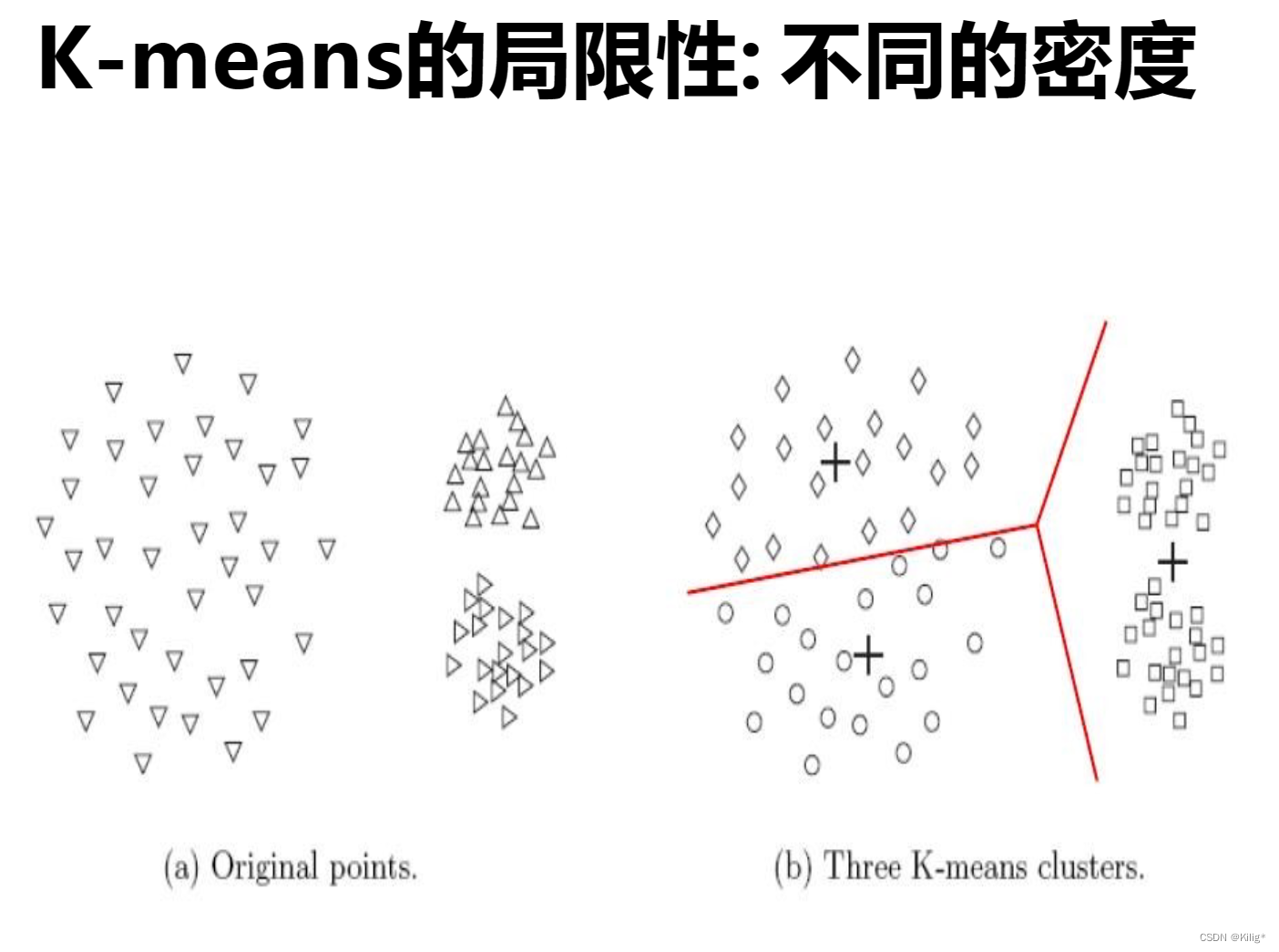
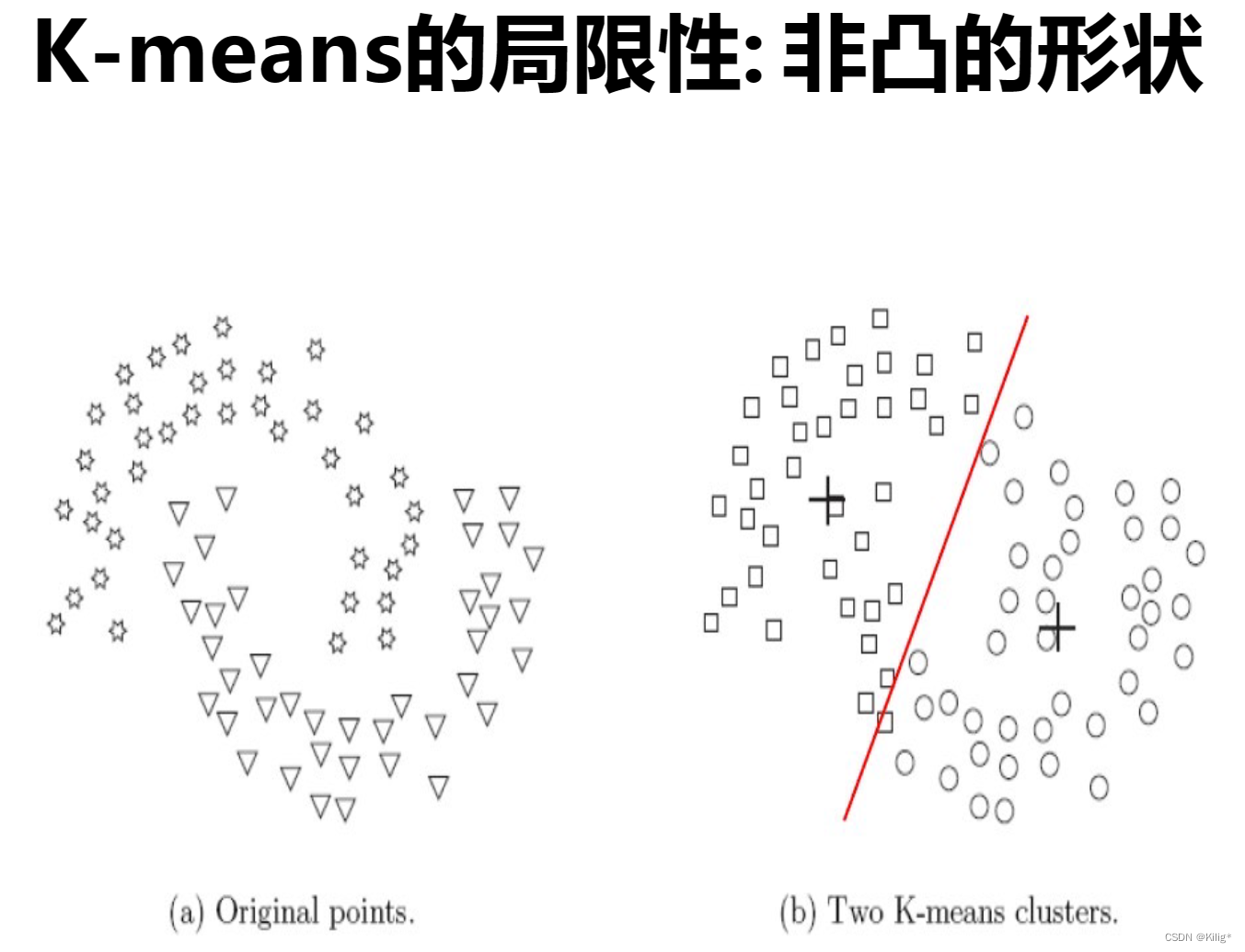
K-means的局限性:
- 硬划分数据:K-means对数据点进行硬划分,即每个数据点只能属于一个簇,当数据存在噪声或异常值时,可能会导致点被错误分配到不合适的簇中。
- 对簇形状和大小的假设:K-means假设簇是球形的,并且每个簇的概率相等,这在某些场景下可能不符合实际情况。
解决方案:
针对K-means的局限性,可以采用以下解决方案:
- 软聚类方法:使用软聚类方法,如高斯混合模型(Gaussian Mixture Models,GMM),允许数据点以一定的概率属于不同的簇,而不是强制性地将其分配到唯一的簇。
- 采用不同形状的簇:对非球形簇结构,可以考虑使用其他形式的聚类算法,如密度聚类(DBSCAN)等,这些算法对数据的形状和密度分布没有特定的假设。
高斯混合模型(Gaussian Mixture Models,GMM)
多维高斯分布的概率密度函数:
对于一个 D D D 维的随机向量 x = ( x 1 , x 2 , … , x D ) T \mathbf{x} = (x_1, x_2, \dots, x_D)^T x=(x1?,x2?,…,xD?)T,其多维高斯分布的概率密度函数可以表示为:
N ( x ∣ μ , Σ ) = 1 ( 2 π ) D / 2 ∣ Σ ∣ 1 / 2 exp ? ( ? 1 2 ( x ? μ ) T Σ ? 1 ( x ? μ ) ) \mathcal{N}(\mathbf{x}|\boldsymbol{\mu}, \boldsymbol{\Sigma}) = \frac{1}{(2\pi)^{D/2} |\boldsymbol{\Sigma}|^{1/2}} \exp \left(-\frac{1}{2} (\mathbf{x} - \boldsymbol{\mu})^T \boldsymbol{\Sigma}^{-1} (\mathbf{x} - \boldsymbol{\mu})\right) N(x∣μ,Σ)=(2π)D/2∣Σ∣1/21?exp(?21?(x?μ)TΣ?1(x?μ))
其中,
- μ = ( μ 1 , μ 2 , … , μ D ) T \boldsymbol{\mu} = (\mu_1, \mu_2, \dots, \mu_D)^T μ=(μ1?,μ2?,…,μD?)T 是均值向量,表示随机向量每个维度的均值。
- Σ \boldsymbol{\Sigma} Σ 是协方差矩阵,表示随机向量各维度之间的协方差。
- ∣ Σ ∣ |\boldsymbol{\Sigma}| ∣Σ∣ 是协方差矩阵的行列式。
- T ^T T 表示向量的转置。
- exp ? ( ? ) \exp(\cdot) exp(?) 是自然指数函数。
高斯混合模型(Gaussian Mixture Model,GMM)
模型形式:
假设有 N N N 个数据点 x 1 , x 2 , … , x N \mathbf{x}_1, \mathbf{x}_2, \dots, \mathbf{x}_N x1?,x2?,…,xN?,GMM 的概率密度函数可表示为:
p ( x ) = ∑ k = 1 K π k N ( x ∣ μ k , Σ k ) p(\mathbf{x}) = \sum_{k=1}^{K} \pi_k \mathcal{N}(\mathbf{x}|\boldsymbol{\mu}_k, \boldsymbol{\Sigma}_k) p(x)=k=1∑K?πk?N(x∣μk?,Σk?)
其中,
- K K K 是高斯分布的数量(聚类数目);
- π k \pi_k πk? 是第 k k k 个高斯分布的权重,满足 ∑ k = 1 K π k = 1 \sum_{k=1}^{K} \pi_k = 1 ∑k=1K?πk?=1;
- N ( x ∣ μ k , Σ k ) \mathcal{N}(\mathbf{x}|\boldsymbol{\mu}_k, \boldsymbol{\Sigma}_k) N(x∣μk?,Σk?) 是多维高斯分布密度函数, μ k \boldsymbol{\mu}_k μk? 是第 k k k 个高斯分布的均值向量, Σ k \boldsymbol{\Sigma}_k Σk? 是其协方差矩阵。
EM算法迭代过程:
- 初始化:随机初始化模型参数(各高斯分布的均值、协方差矩阵和权重)。
- E步骤(Expectation):
- 计算每个数据点
x
n
\mathbf{x}_n
xn? 属于每个高斯分布的后验概率,即第
k
k
k 个高斯分布生成第
n
n
n 个数据点的概率:
γ ( z n k ) = π k N ( x n ∣ μ k , Σ k ) ∑ j = 1 K π j N ( x n ∣ μ j , Σ j ) \gamma(z_{nk}) = \frac{\pi_k \mathcal{N}(\mathbf{x}_n|\boldsymbol{\mu}_k, \boldsymbol{\Sigma}_k)}{\sum_{j=1}^{K} \pi_j \mathcal{N}(\mathbf{x}_n|\boldsymbol{\mu}_j, \boldsymbol{\Sigma}_j)} γ(znk?)=∑j=1K?πj?N(xn?∣μj?,Σj?)πk?N(xn?∣μk?,Σk?)?
- 计算每个数据点
x
n
\mathbf{x}_n
xn? 属于每个高斯分布的后验概率,即第
k
k
k 个高斯分布生成第
n
n
n 个数据点的概率:
- M步骤(Maximization):
- 重新估计参数:
- 更新每个高斯分布的权重
π
k
\pi_k
πk?:
π k = 1 N ∑ n = 1 N γ ( z n k ) \pi_k = \frac{1}{N} \sum_{n=1}^{N} \gamma(z_{nk}) πk?=N1?n=1∑N?γ(znk?) - 更新每个高斯分布的均值
μ
k
\boldsymbol{\mu}_k
μk?:
μ k = ∑ n = 1 N γ ( z n k ) x n ∑ n = 1 N γ ( z n k ) \boldsymbol{\mu}_k = \frac{\sum_{n=1}^{N} \gamma(z_{nk})\mathbf{x}_n}{\sum_{n=1}^{N} \gamma(z_{nk})} μk?=∑n=1N?γ(znk?)∑n=1N?γ(znk?)xn?? - 更新每个高斯分布的协方差矩阵
Σ
k
\boldsymbol{\Sigma}_k
Σk?:
Σ k = ∑ n = 1 N γ ( z n k ) ( x n ? μ k ) ( x n ? μ k ) T ∑ n = 1 N γ ( z n k ) \boldsymbol{\Sigma}_k = \frac{\sum_{n=1}^{N} \gamma(z_{nk})(\mathbf{x}_n - \boldsymbol{\mu}_k)(\mathbf{x}_n - \boldsymbol{\mu}_k)^T}{\sum_{n=1}^{N} \gamma(z_{nk})} Σk?=∑n=1N?γ(znk?)∑n=1N?γ(znk?)(xn??μk?)(xn??μk?)T?
- 更新每个高斯分布的权重
π
k
\pi_k
πk?:
- 重新估计参数:
- 重复迭代:重复执行E步骤和M步骤,直到模型参数收敛或达到预设的迭代次数。
在EM算法中,E步骤计算数据点属于每个高斯分布的后验概率,M步骤根据这些后验概率重新估计模型参数,迭代更新直至收敛。这个过程旨在最大化观测数据的似然函数,使得模型能够更好地拟合数据。
K-means 与 高斯混合模型(GMM)的对比:
K-means:
- 硬聚类算法:每个数据点仅属于一个簇。
- 假设:假定簇为球形,并对数据进行硬划分。
- 速度快:简单且计算效率高,适用于大规模数据集。
高斯混合模型(GMM):
- 软聚类算法:允许一个数据点以一定概率分配到不同的聚类中心。
- 假设:允许簇有不同形状和大小,并用高斯分布建模数据分布。
- 灵活性:适用于更广泛的数据形状和分布。
- 更复杂的模型:与K-means相比,GMM具有更复杂的模型和参数(均值、协方差、权重)。
高斯混合模型(GMM)的优缺点:
优点:
- 灵活性:对数据分布的假设更加灵活,可以拟合各种形状和大小的簇。
- 软聚类:允许数据以一定概率属于不同的聚类中心,更符合实际场景。
- 能量表达能力强:GMM是一个强大的建模工具,能够捕获数据中的复杂关系。
缺点:
- 计算复杂度高:相比于K-means,GMM具有更高的计算复杂度,特别是在高维数据上。
- 对初始值敏感:GMM对于初始参数值敏感,不同的初始值可能会导致不同的聚类结果。
- 可能陷入局部最优解:迭代优化过程可能陷入局部最优解,影响模型的效果。
选择应用场景:
- 如果数据集具有明显的簇结构、数据分布近似球形,并且对计算速度要求较高,K-means可能是一个不错的选择。
- 如果数据集具有复杂的形状、大小和分布,或者需要更丰富的数据建模,GMM可能更适合。
- 通常,可以根据数据的特点和任务的需求来选择适合的聚类算法。
层次聚类
簇之间的相似性度量
最小距离
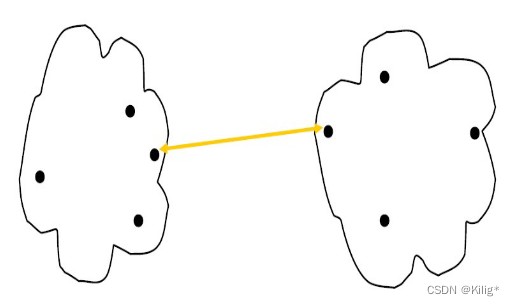
适合发现凸型簇或者非等向性的簇,对异常值不敏感。它衡量的是两个簇中最近的两个数据点的距离,所以在形成簇的过程中,容易受到离群点的影响。
最大距离
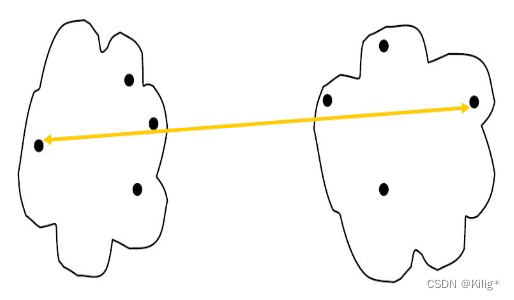
适合发现球状簇,能够很好地处理不同大小和密度的簇,对噪声和异常值比较稳健。它考虑的是两个簇中距离最远的两个数据点之间的距离,使得形成的簇间距离更大。
平均距离
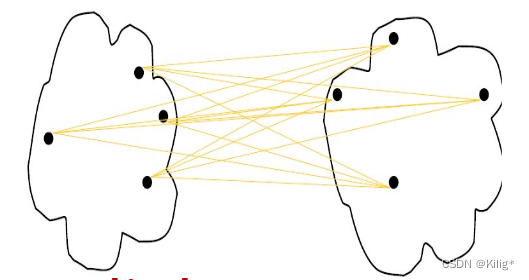
对各种类型的簇都相对适用,通常被视为对最小距离和最大距离的折衷方案。它计算两个簇中所有数据点之间的平均距离,能够平衡最小和最大距离法的影响。
中心点距离
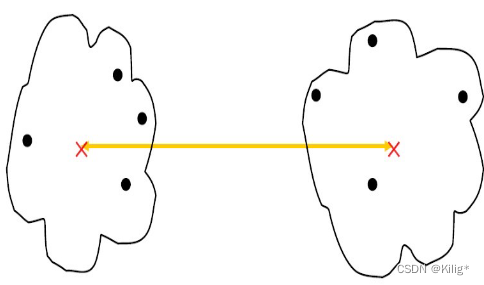
考虑簇之间的中心点(质心)之间的距离。这种方法对异常值相对较敏感,因为它完全依赖于簇的中心点,并且不适合非凸形状的簇。
层次聚类是一种按照层次结构组织的聚类方法,其主要思想是将数据点逐步合并或分割,形成一个层次化的聚类结构。层次聚类方法有两种主要的方法:凝聚聚类(Agglomerative Clustering)和分裂聚类(Divisive Clustering)。这里我将介绍凝聚聚类的过程。
凝聚聚类过程:
凝聚聚类是一种自底向上的聚类方法,其步骤如下:
-
初始化:
- 将每个数据点视为一个单独的簇。
-
计算相似度或距离:
- 计算所有数据点之间的相似度或距离(如欧氏距离、曼哈顿距离、相关系数等)。
-
合并最近的簇:
- 找到相似度或距离最小的两个簇,并将它们合并成一个新的簇。
- 合并簇的方式可以根据不同的距离度量方法来确定,比如单链接(single-linkage)、全链接(complete-linkage)、平均链接(average-linkage)等。
-
更新相似度矩阵:
- 更新相似度矩阵,重新计算新簇与其他簇之间的距离或相似度。
-
重复合并步骤:
- 重复进行合并步骤,不断合并距离最近的簇,直到满足某个停止条件(比如指定簇的数量、距离阈值等)。
-
构建聚类树(Dendrogram):
- 沿着合并过程,可以记录每次合并的簇以及它们的距离,构建层次聚类树或者称为树状图(Dendrogram)。
-
树状图的剪枝(可选):
- 可以根据业务需求或者树状图的结构,通过剪枝来选择最终的聚类结果,确定簇的数量。
凝聚聚类方法将每个数据点作为一个簇,然后通过不断合并最接近的簇,逐步形成层次化的聚类结构。最终,通过聚类树(Dendrogram)或剪枝得到最终的聚类结果。
DBSCAN
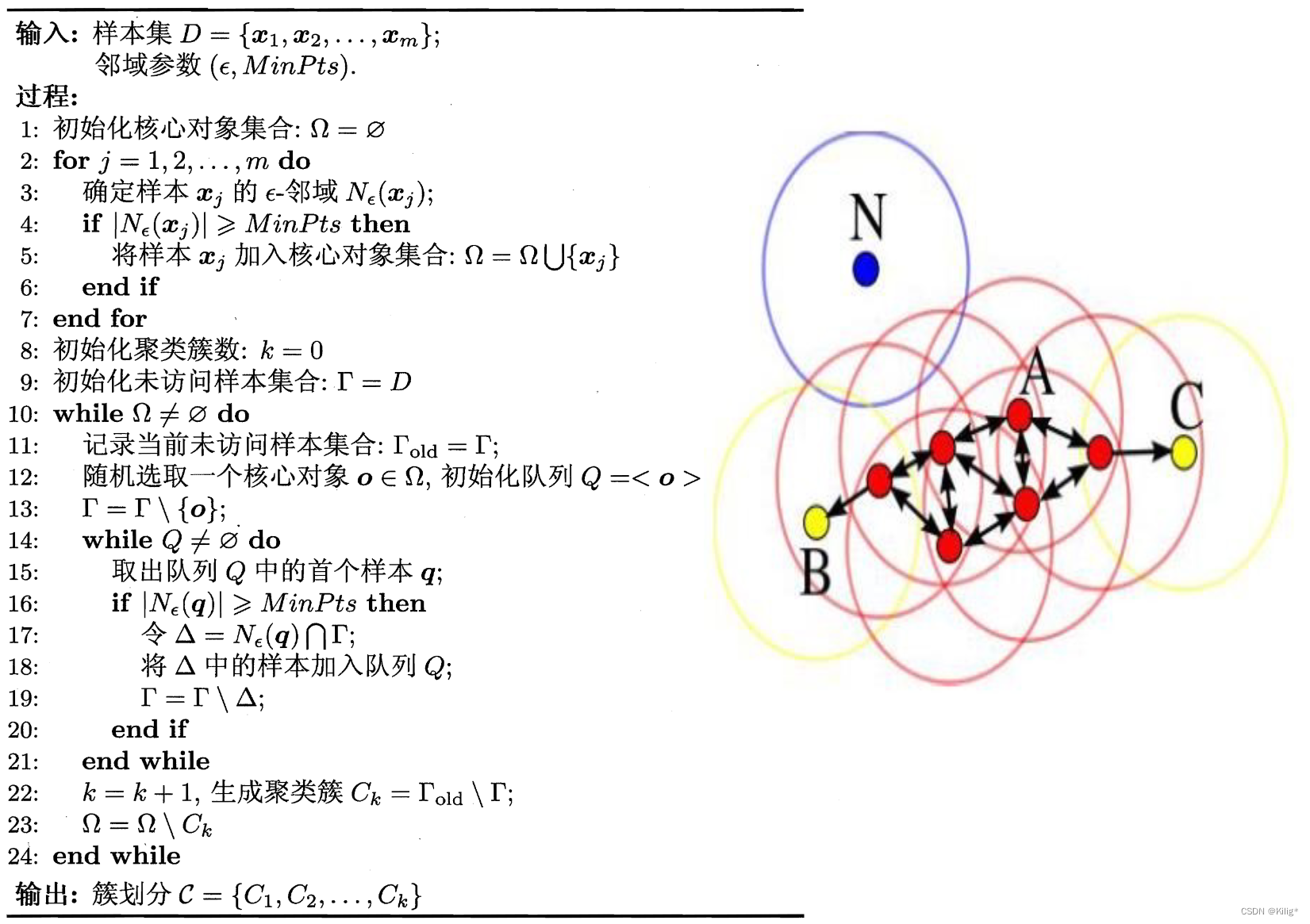
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一种基于密度的聚类算法,能够识别具有不同密度的样本点,并能够有效地处理噪声点。DBSCAN通过定义“邻域”和“核心点”来识别簇,并能够发现任意形状的簇结构。
DBSCAN算法步骤:
-
定义邻域:
- 以一个指定的距离阈值 ε \varepsilon ε 作为半径,对每个数据点 p \mathbf{p} p 进行邻域定义。
- 如果在以 p \mathbf{p} p 为中心,半径为 ε \varepsilon ε 的圆球内包含超过指定数量(MinPts)的点,则 p \mathbf{p} p 被视为核心点。
-
寻找核心点和连接簇:
- 根据第一步的定义,寻找所有核心点,并将每个核心点的邻域内的点归为同一个簇。
- 如果点 q \mathbf{q} q 在 p \mathbf{p} p 的邻域内,且 q \mathbf{q} q 也是核心点,则将 q \mathbf{q} q 的簇合并到 p \mathbf{p} p 所在的簇中。
-
处理噪声点:
- 将不能成为核心点,也不在任何核心点的邻域内的数据点视为噪声点或边界点。
DBSCAN的特点:
- 能处理任意形状的簇:相比于K-means等硬聚类算法,DBSCAN能够发现任意形状的簇,对簇的形状没有特定的假设。
- 对噪声点鲁棒:DBSCAN能够识别和过滤噪声点,将其视为离群点。
- 不需要提前指定簇的数量:与K-means等需要提前指定簇数量的算法不同,DBSCAN不需要这个先验信息。
参数说明:
- ε \varepsilon ε:邻域的半径大小。
- MinPts:定义核心点时所需的最小邻域点数。
优势与局限性:
优势:
- 能够识别任意形状的簇结构。
- 对噪声和离群点有较好的鲁棒性。
- 不需要提前指定簇的数量。
局限性:
- 对于密度不均匀的数据或具有差异密度的簇效果可能不理想。
- 对于高维数据集,由于“维度灾难”问题,需要谨慎选择距离阈值和邻域点数。
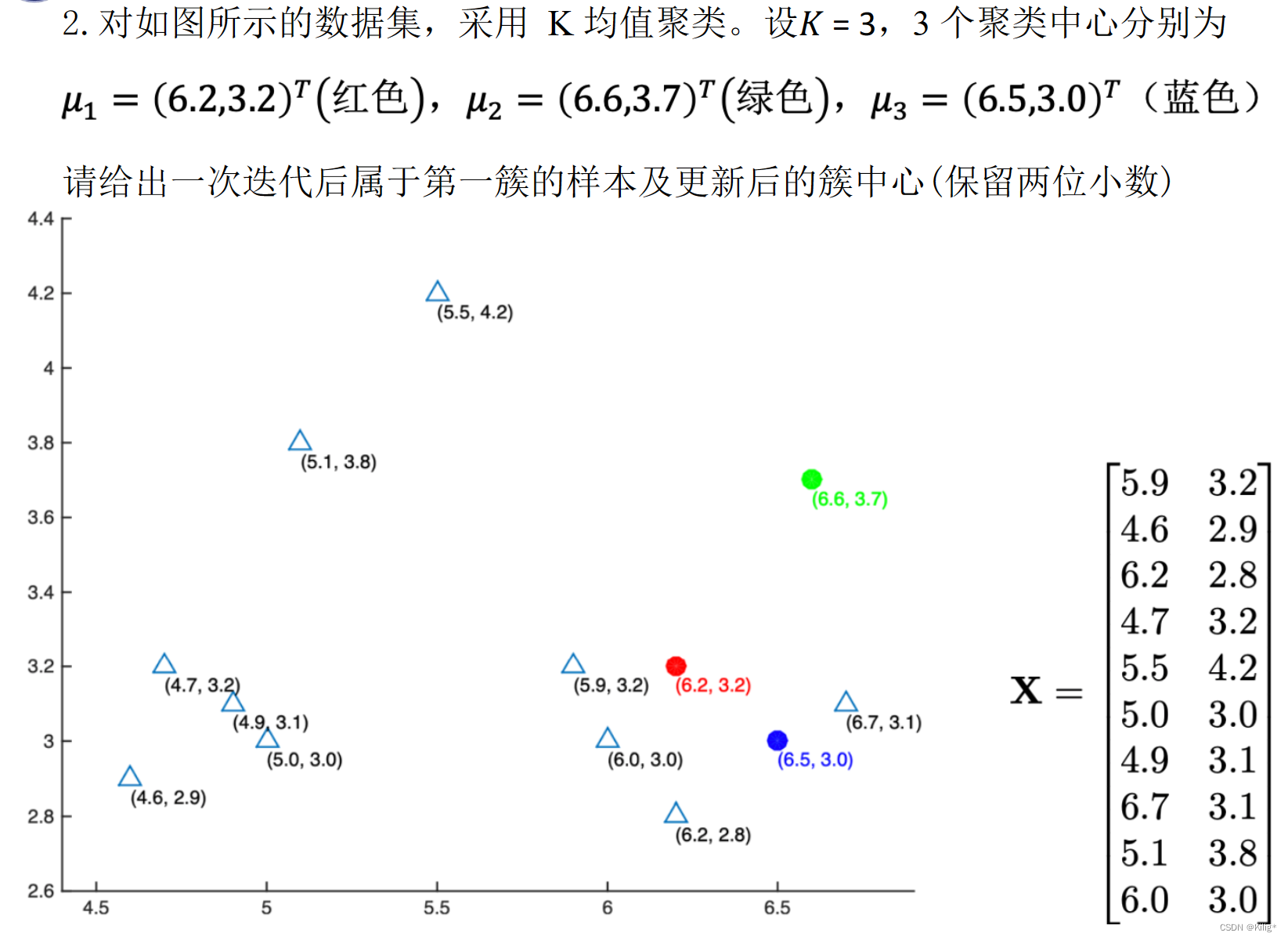
例题

import math
import numpy as np
data=[[5.9, 3.2],
[4.6, 2.9],
[6.2, 2.8],
[4.7, 3.2],
[5.5, 4.2],
[5.0, 3.0],
[4.9, 3.1],
[6.7, 3.1],
[5.1, 3.8],
[6.0, 3.0]]
center = [[6.2,3.2],[6.6,3.7],[6.5,3.0]]
def cal_distance(point1, point2):
# 计算两点之间的欧氏距离
distance = math.sqrt((point1[0] - point2[0])**2 + (point1[1] - point2[1])**2)
return distance
def get_min_index(lst):
# 获取最小值
min_value = min(lst)
# 获取最小值的下标
min_index = lst.index(min_value)
return min_index
data_dict = {0:[],1:[],2:[]}
for i in data:
tmp = []
print("点:",i,end = '\t')
for j in center:
tmp.append(round(cal_distance(i,j),2))
print(f"距离类别{center.index(j)}的距离:",round(cal_distance(i,j),2),end = '\t')
data_dict[get_min_index(tmp)].append(i)
print("分配给类别:",get_min_index(tmp))
for i in data_dict.keys():
print(f"类别{i}的中心为:{np.array(data_dict[i]).mean(axis = 0)}")
输出:
点: [5.9, 3.2] 距离类别0的距离: 0.3 距离类别1的距离: 0.86 距离类别2的距离: 0.63 分配给类别: 0
点: [4.6, 2.9] 距离类别0的距离: 1.63 距离类别1的距离: 2.15 距离类别2的距离: 1.9 分配给类别: 0
点: [6.2, 2.8] 距离类别0的距离: 0.4 距离类别1的距离: 0.98 距离类别2的距离: 0.36 分配给类别: 2
点: [4.7, 3.2] 距离类别0的距离: 1.5 距离类别1的距离: 1.96 距离类别2的距离: 1.81 分配给类别: 0
点: [5.5, 4.2] 距离类别0的距离: 1.22 距离类别1的距离: 1.21 距离类别2的距离: 1.56 分配给类别: 1
点: [5.0, 3.0] 距离类别0的距离: 1.22 距离类别1的距离: 1.75 距离类别2的距离: 1.5 分配给类别: 0
点: [4.9, 3.1] 距离类别0的距离: 1.3 距离类别1的距离: 1.8 距离类别2的距离: 1.6 分配给类别: 0
点: [6.7, 3.1] 距离类别0的距离: 0.51 距离类别1的距离: 0.61 距离类别2的距离: 0.22 分配给类别: 2
点: [5.1, 3.8] 距离类别0的距离: 1.25 距离类别1的距离: 1.5 距离类别2的距离: 1.61 分配给类别: 0
点: [6.0, 3.0] 距离类别0的距离: 0.28 距离类别1的距离: 0.92 距离类别2的距离: 0.5 分配给类别: 0
类别0的中心为:[5.17142857 3.17142857]
类别1的中心为:[5.5 4.2]
类别2的中心为:[6.45 2.95]
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 二进制表示(14)
- 数组的定义与使用
- 聊一聊服务治理三板斧:限流、熔断、降级和go-sentinel的实现
- 【Spring Boot】项目端口号冲突解决方法,一步到位
- 【Pandas案例1】 根据某些相同属性列合并同类数据
- 【人工智能】最详尽的产生式系统实验报告:动物类型产生式推理系统
- MySQL之导入、导出&远程备份
- 「红队笔记」靶机精讲:Prime1 - 信息收集和分析能力的试炼
- 记一次服务器被入侵的排查过程
- LeetCode算法题解:螺旋矩阵