【电机控制】PMSM无感foc控制(八)锁相环(PLL)的应用
0. 前言
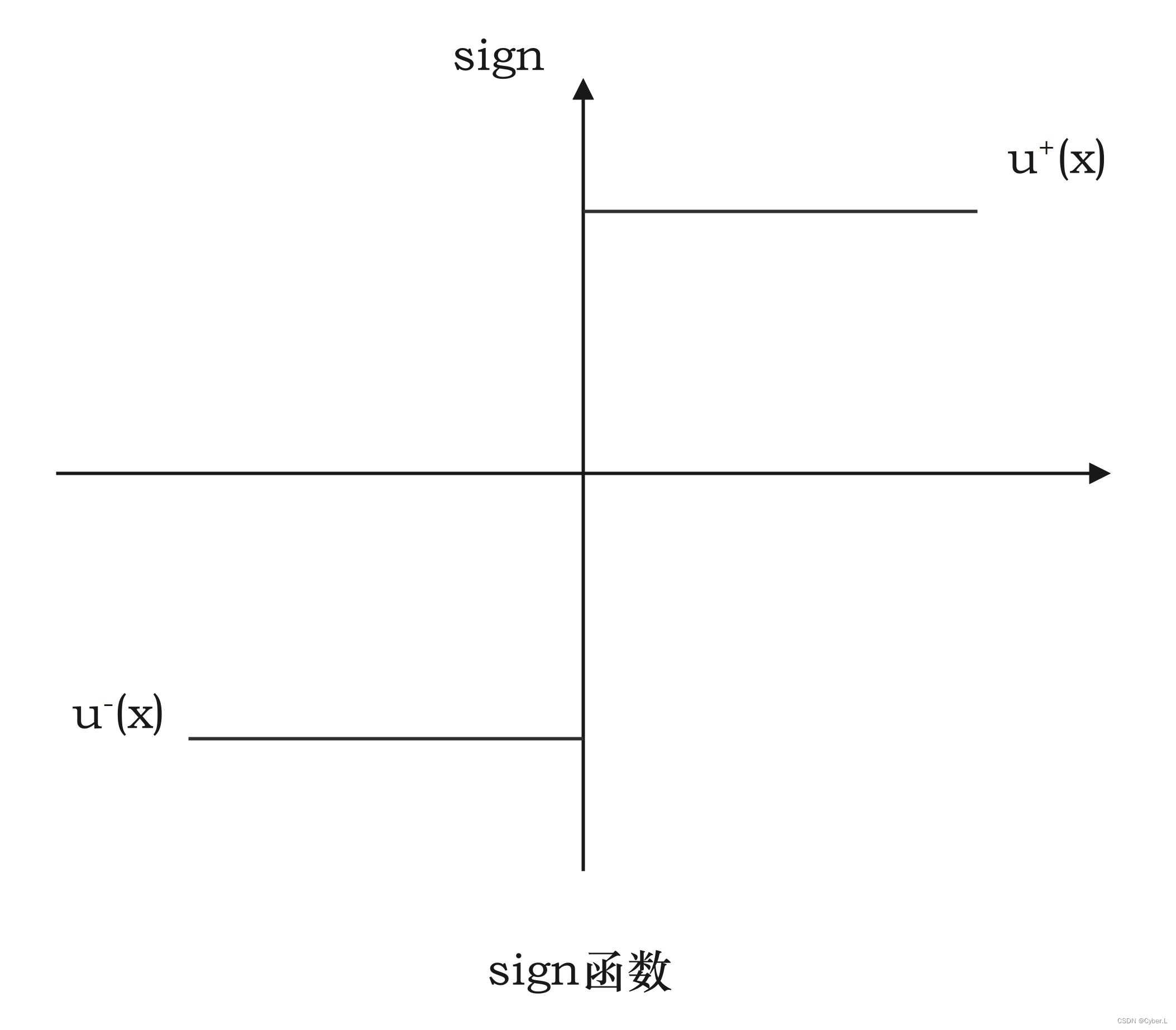
??????? 上一章我们讲了滑模观测器在PMSM无感控制中的应用,首先我们通过滑模观测器计算出了反电动势再通过反电动势计算出了转子位置,但是实际上由于变结构系统因为自身的机理,在控制系统到达滑动平面时会产生抖振现象,使得反电动势这一观测量也存在高频抖振,因为控制函数是跟电流误差相关的一个开关函数![]() 。
。
????????而反电动势中包含转子位置和速度信号,如果直接通过简单的数值运算提取这些信号的话,势必直接将反电动势中的抖振引入到数值计算中,致使转子估计速度及位置也同样存在抖振,从而使得估计误差较大。
??????? 为了消除变结构中的抖振,可以将控制函数中的sign函数换成了饱和函数sat函数(或其他函数)来实现。
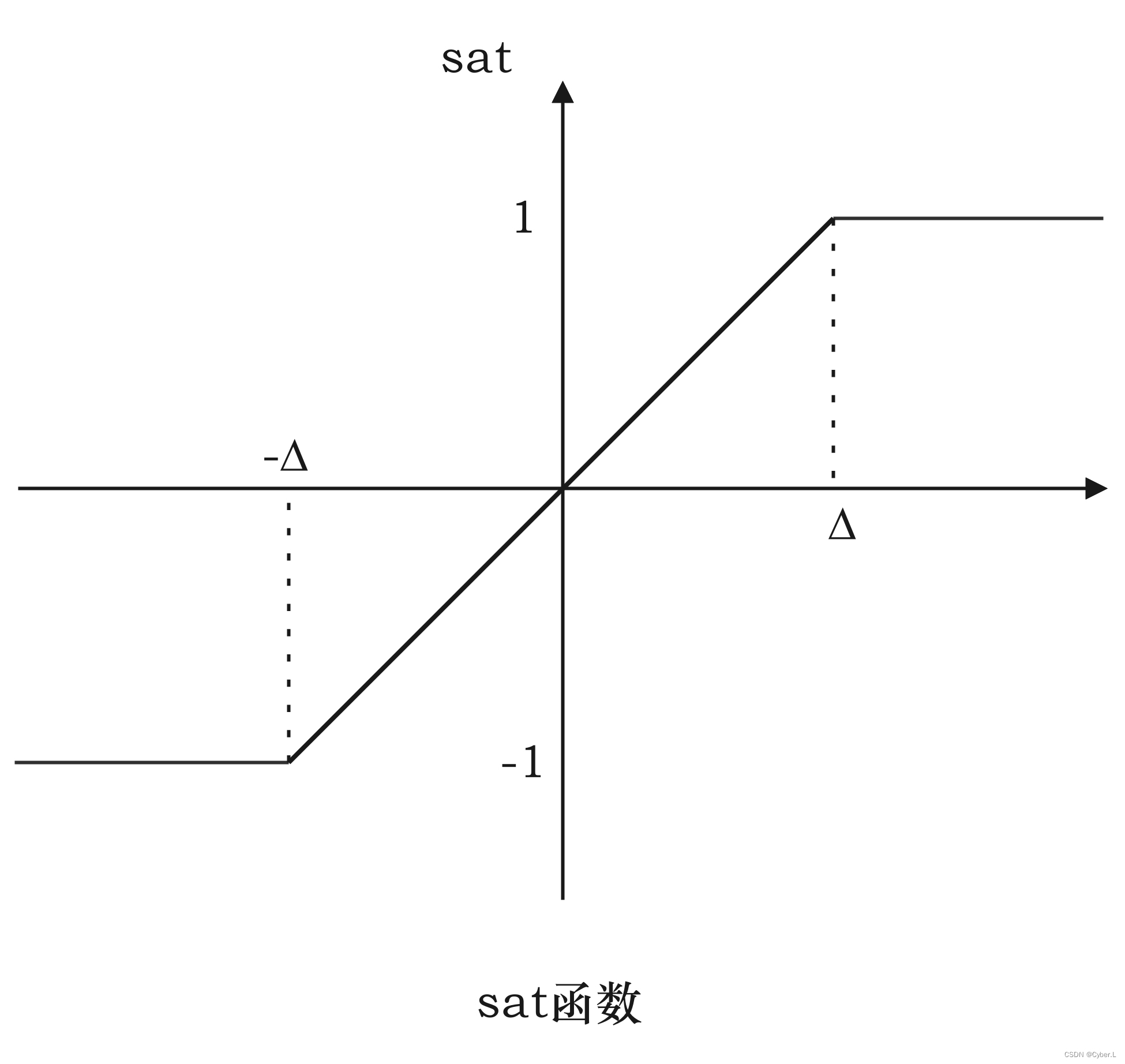

??????? 但是换成sat函数之后,在滑动模态区的周围存在一领域,被称为“边界层”,在边界层内的 状态点不再满足在边界层外依旧满足滑动模态存在条件![]() ,因此,这不是一种真正的滑模动态,而是一种近似滑动模态,通常称为“准滑动模态”,系统变成了连续系统,控制信号不会在某个特定的“滑动面”上发生突变,已经不再是变结构系统, 失去了变结构控制滑动运动的不变性。
,因此,这不是一种真正的滑模动态,而是一种近似滑动模态,通常称为“准滑动模态”,系统变成了连续系统,控制信号不会在某个特定的“滑动面”上发生突变,已经不再是变结构系统, 失去了变结构控制滑动运动的不变性。
??????? 为了保留变结构控制滑动运动的不变性,又同时减小高频抖振的影响,人们将滑模观测器和锁相环结合在一起,先通过滑模观测器估计出电机反电动势,再构造基于锁相环结构的转子位置检测单元,从估计的反电动势中提取电机转子位置和速度信号。该方法能够在很大程度上削弱估计反电动势中的高频抖动分量对系统被估量的影响,提高了估计精度。
1. 锁相环原理
????????锁相环系统由三个部分组成:鉴相器(PD)、环路滤波器(LF)、压控振荡器(VCO)组成。如图1-1所示:
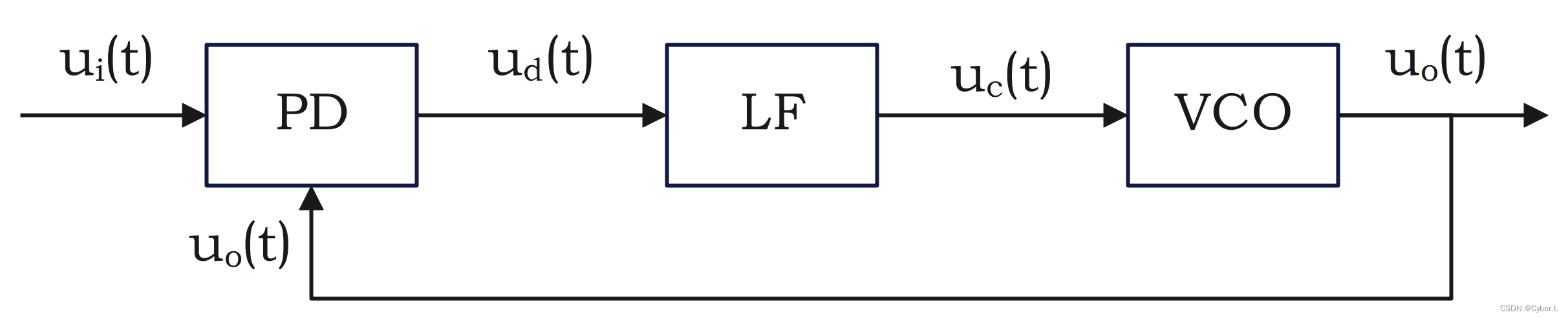
图1-1 锁相环系统组成
??????? 其原理是利用系统输出信号相位uo(t)和输入信号相位ui(t)的差控制系统输出信号频率uc(t),直到输出信号频率跟踪给定信号频率。
??????? 环路滤波器(LF)的形式有很多种,本章讲解采用比例积分形式的环路滤波器,由于环路滤波器釆用比例积分形式,经锁相环鉴频、鉴相后,给定信号频率及相位与压控振荡器输出信 号频率及相位均保持一致,达到相位跟踪的效果。?
PLL各个部分的作用如下:
- ?鉴相器(PD):起到相位比较器作用,它对输入信号相位ui(t)与输出信号相位uo(t)的相位进行比较, 产生误差 ud(t)。
- 环路滤波器(LF):环路滤波器作用是滤除误差的高频成分和噪声,并改善锁相环路的噪声性能,输出uo(t)信号的频率uc(t)。
- 压控振荡器(VCO):根据来自滤波器的输出信号频率uc(t)调整其输出信号uo(t)。
2. 锁相环转子速度/位置检测系统
??????? 锁相环压控振荡器输出值可以很好地跟踪到输入值。因此,将其应用到转子位置信号的提取当中。这里以电机估计反电动势作为锁相环输入信号,根据反电动势与转子位置之间的关系,建立锁相环转子位置检测系统,来提取反电动势中包含的位置信号,如图2-1所示。
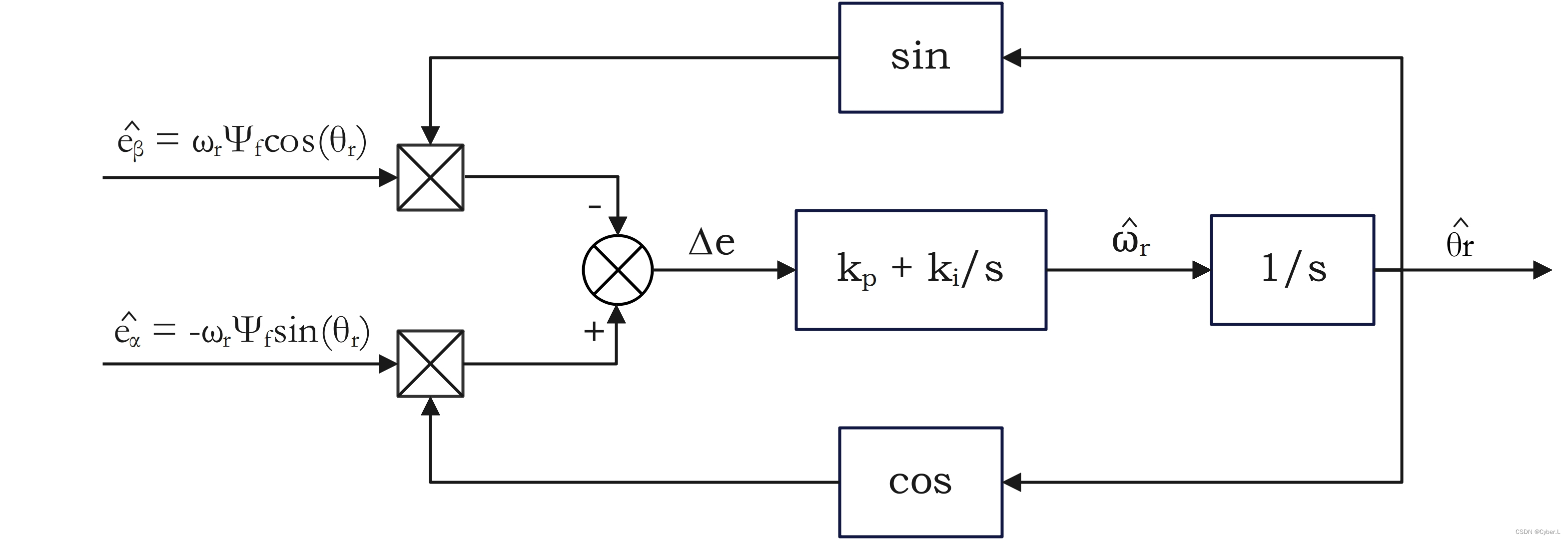
图2-1 锁相环转子速度/位置检测系统
????????根据图2-1可知,Δe含有转子相位差信号,其值为:
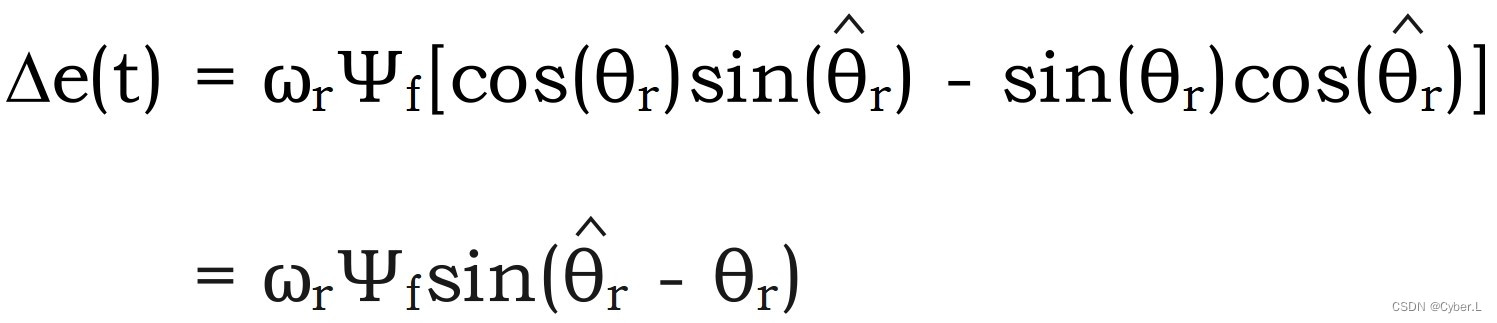
??????? 根据上式我们把图2-1变换一下,就能与第一节里面的概念连接起来了,锁相环转子速度/位置检测系统等效图,如图2-2所示。

?图2-2 锁相环转子速度/位置检测系统
锁相环转子速度/位置检测过程:
- 当PLL开始工作时,参考信号(实际角度)和VCO的初始输出信号(估算角度)可能在频率和相位上存在差异。
- 相位比较器检测这种差异,并生成一个误差Δe,Δe反映两个信号的相位差。
- 误差电压经过低通滤波器后,被用来调整VCO的输出的频率(估算角度的角频率)。
- 输出的频率会逐渐改变,直到其输出信号的相位与参考信号的相位一致,或者达到预设的相位关系。
- 当两个信号的相位差减小到零时,输出的频率就被锁定在与参考信号相同的值上。
- 在锁定状态下,即使外部条件发生变化导致VCO的频率有所漂移,PLL也会通过反馈机制迅速调整VCO的频率,使其保持锁定状态。
3. 总结
????????滑膜观测器由于变结构系统因为自身的机理,在控制系统到达滑动平面时会产生抖振现象,使得反电动势这一观测量也存在高频抖振,直接通过简单的数值运算提取转子角度和速度的话,会将反电动势中的抖振引入到数值计算中,致使转子估计速度及位置也同样存在抖振,从而使得估计误差较大。
????????为了消除滑膜观测器的抖振,实际应用中通常会把滑模观测器与锁相环结合起来使用,从而达到观测器估算转子转速的目的。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 基于ssm大学学术交流论坛论文
- 1.16云支教(集合的概念、定义)
- 分享 JVM 、JUC、Redis、MySQL 知识脑图 适合Java初中级开发
- L1-058:6翻了
- java面试题整合
- ESP32 核心闪存损坏
- 实验用python实现决策树和随机森林分类
- springboot/java/php/node/python基于的健身俱乐部综合管理系统【计算机毕设】
- Redis HyperLogLog 命令
- HTML5 画布绘制海报