Open3D 从体素网格构建八叉树(14)
发布时间:2024年01月13日
一、算法简介
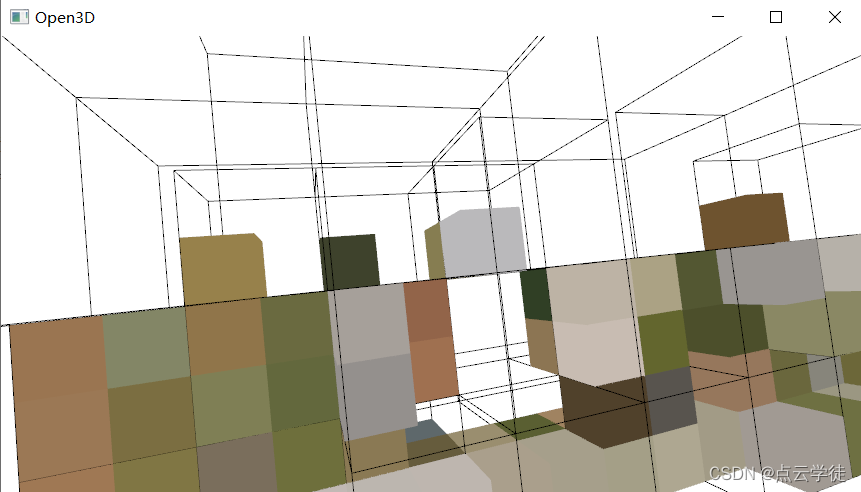
上一章介绍从点云构建八叉树,对点云所在体素进行了可视化显示,这里可以对体素构建八叉树,可视化显示八叉树的具体划分结构。
二、算法实现
1.代码
代码如下(示例):
import open3d as o3d
import numpy as np
# 构建点云对象
pcd = o3d.io.read_point_cloud("D:\\shuju\\简
文章来源:https://blog.csdn.net/weixin_44329757/article/details/135576975
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 前端八股文(性能优化篇)
- 【VMware】Windows安装MySQL(5.7&8版本)及网络配置---图文并茂详细介绍
- 文件管理工具.netcore资源文件管理
- 蓝桥杯省赛无忧 STL 课件17 map
- 02_2 连续时间信号的傅里叶级数(FS) 三角形式的傅里叶级数
- neo4j 图数据库 py2neo 操作 示例代码
- k8s-1.23版本安装
- Java版企业电子招标采购系统源码Spring Cloud + Spring Boot +二次开发+ MybatisPlus + Redis
- vivado18.3和modelsim关联
- 第9章-网络设备基本调试