ROS学习记录:如何在Github上寻找并安装软件包
发布时间:2023年12月27日
一、打开网页输入www.github.com
二、进入github界面
三、打开一个终端,输入mkdir catkin_ws1建立一个工作空间
四、使用cd catkin_ws1进入工作空间
五、使用mkdir src创建一个子目录src就是source,原始资料的意思,指的就是程序源代码这类资源材料,我们的源代码工程需要放到src子目录里面才能正常编译
六、使用cd src进入该子目录
七、使用sudo apt install git安装git
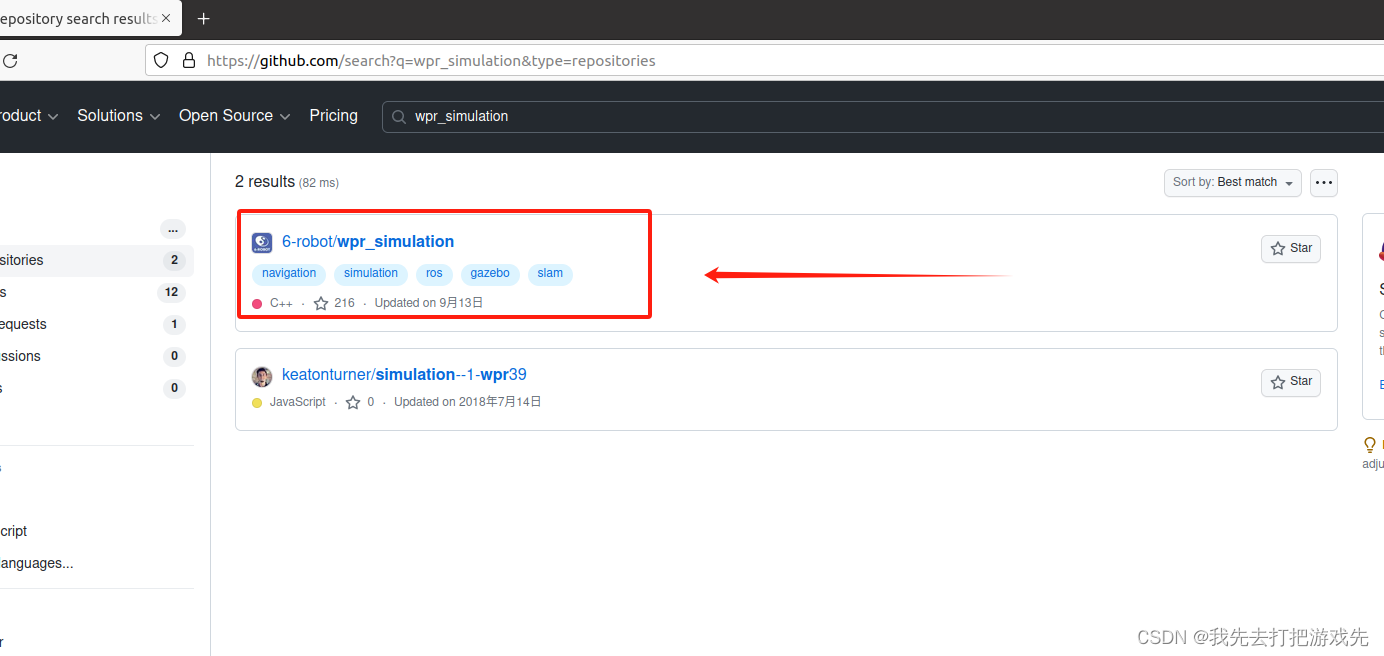
八、回到github官网,在搜索栏中输入wpr_simulation
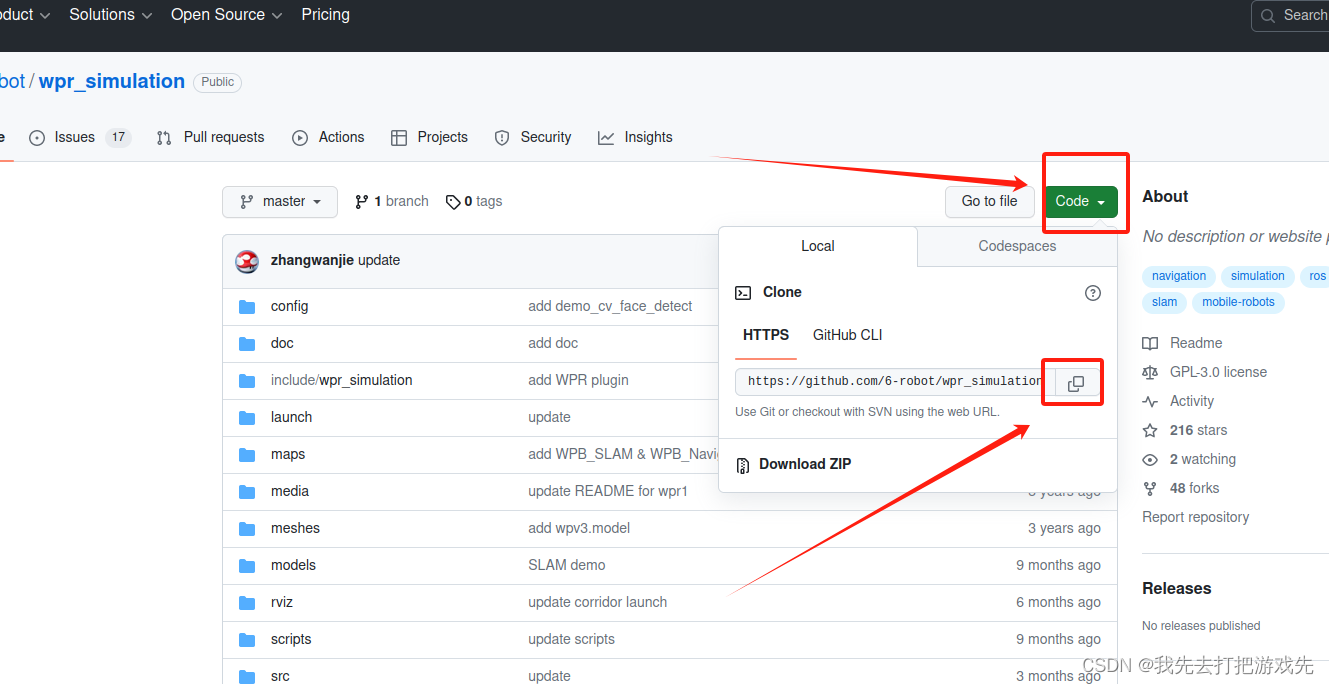
九、找到这个点击进入
十、点击复制
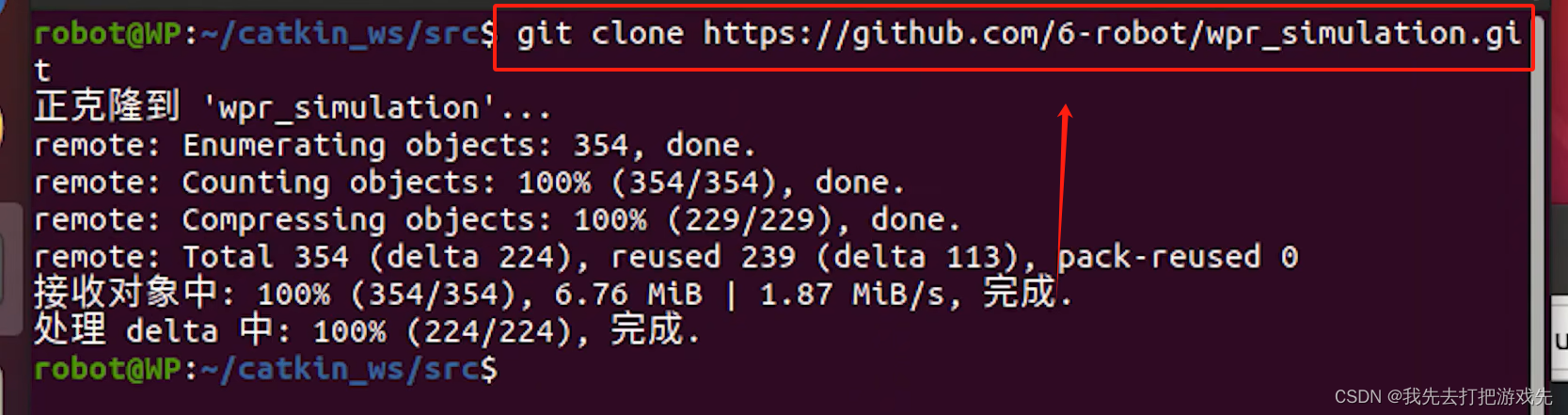
十一、使用git clone +鼠标右键粘贴刚刚复制的网址,然后回车进行软件包克隆
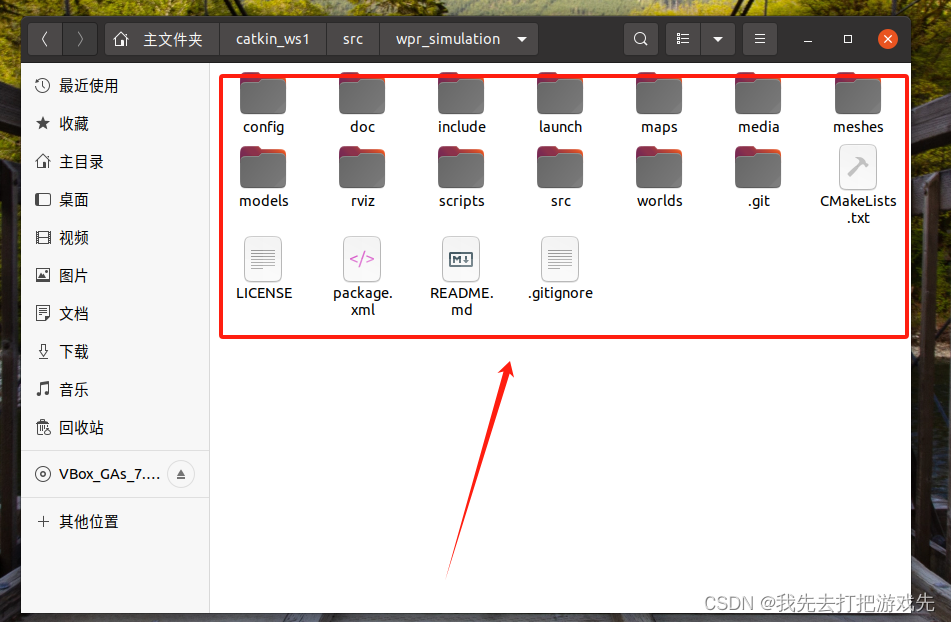
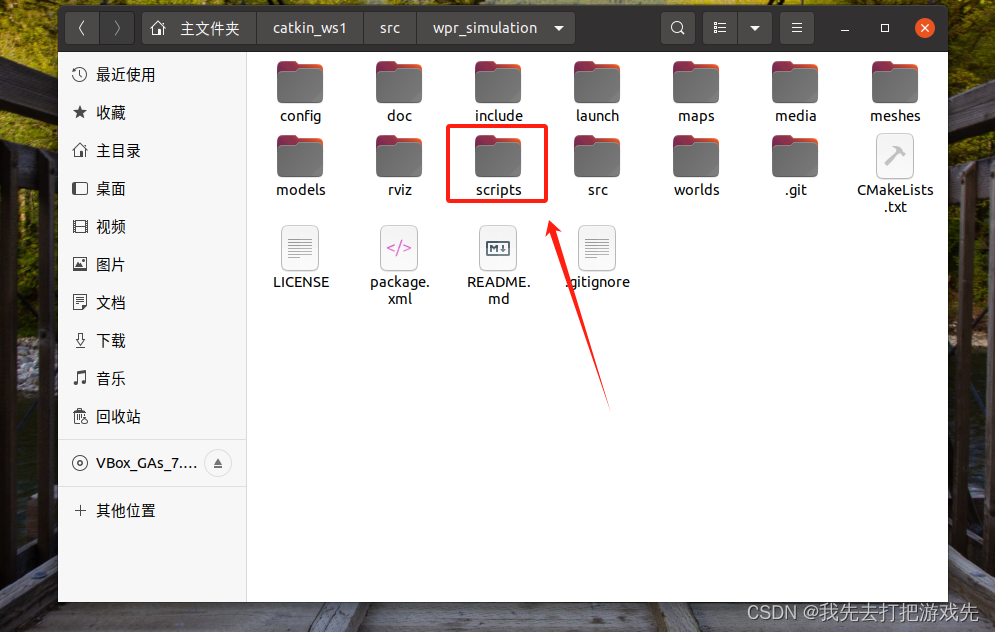
十二、克隆好后,在文件管理中查看软件包,这是软件包中的内容
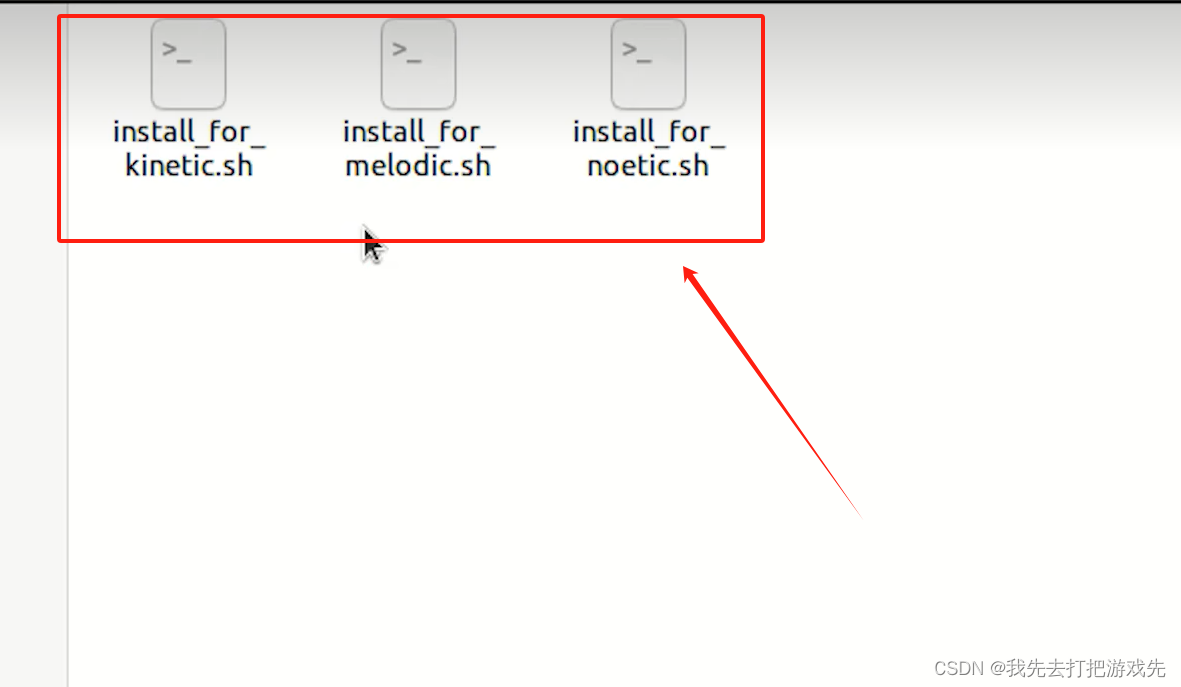
十三、scripts目录用于放置脚本文件和Python程序,点击进入这个目录
十四、里面有三个安装依赖包的脚本文件
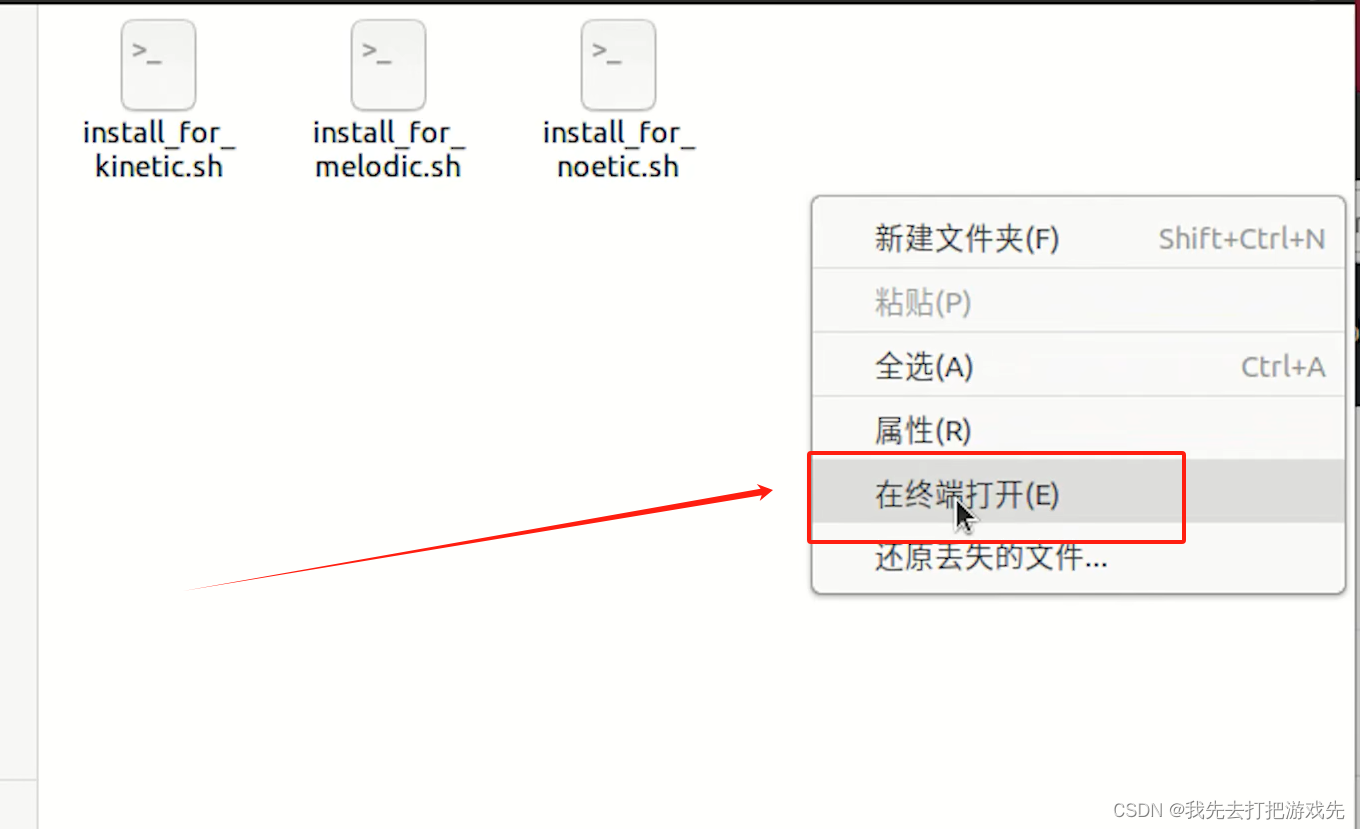
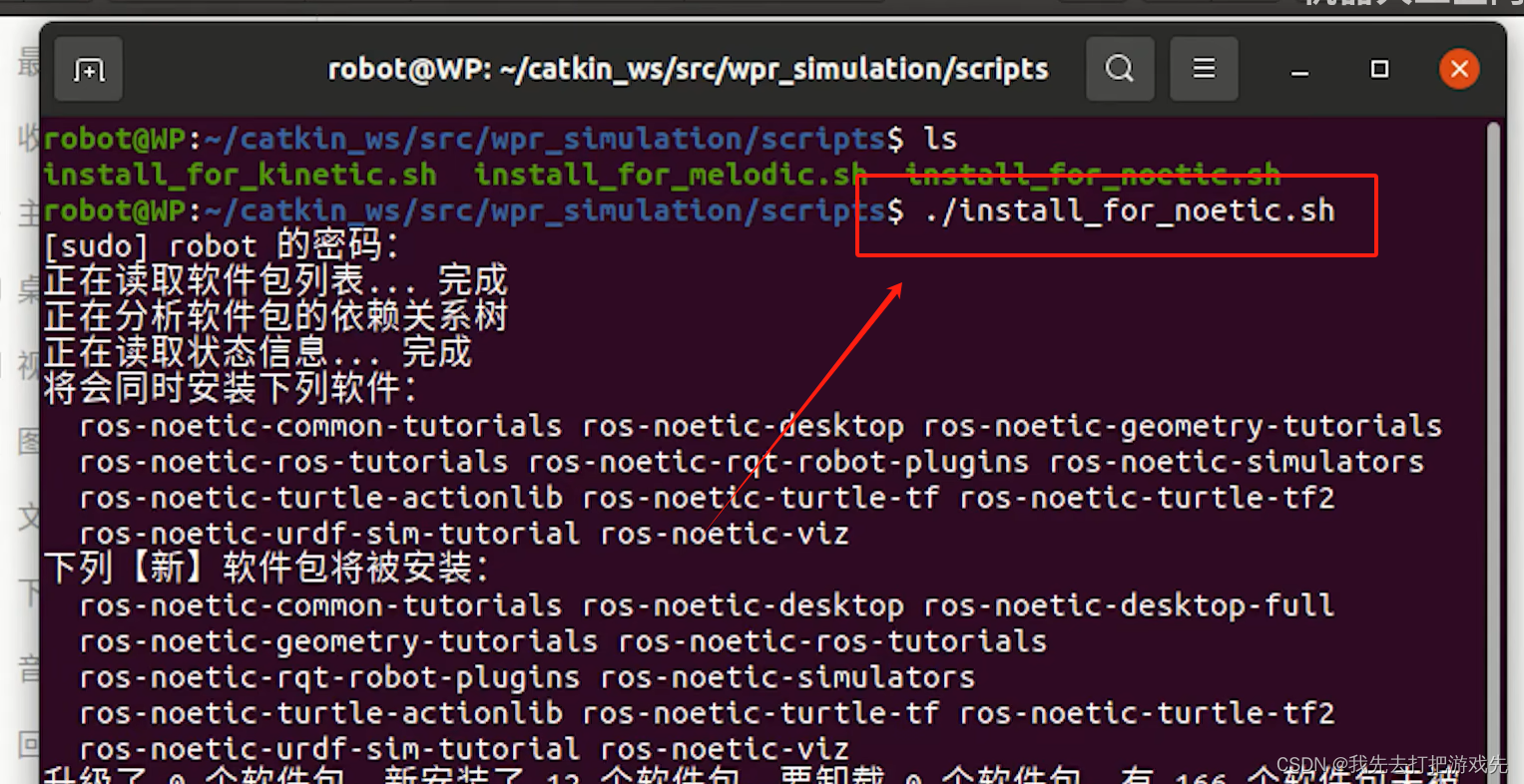
十五、在该目录下打开终端
十六、输入==./install_for_noetic.sh==安装依赖包
十七、输入 cd ~/catkin_ws1回到工作空间
十八、输入catkin_make进行编译
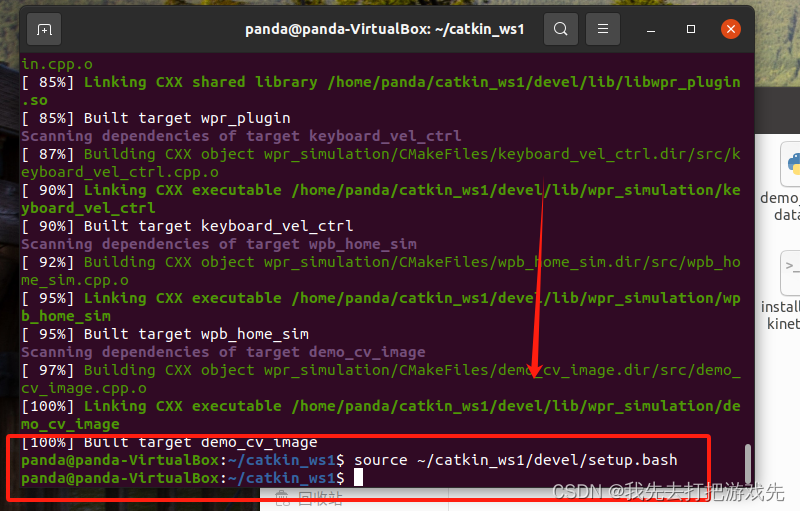
十九、使用sourc ~/catkin_ws1/devel/setup.bash指令载入工作空间的环境变量
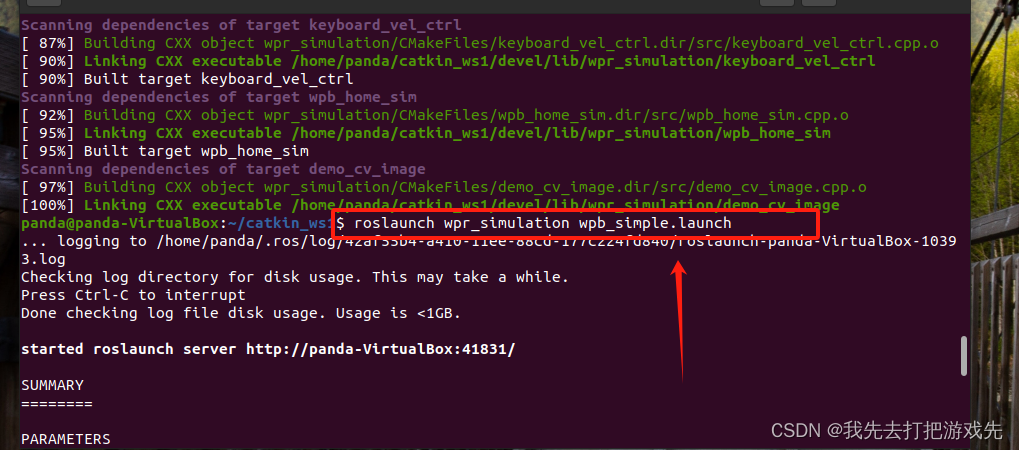
二十、在终端中输入roslaunch wpr_simulation wpb_simple.launch 后回车
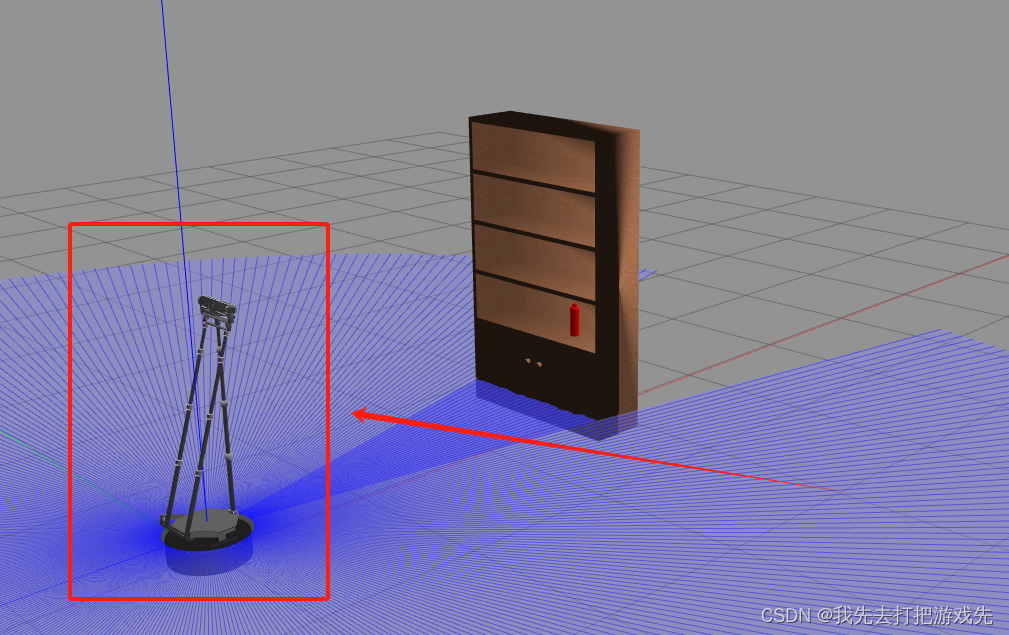
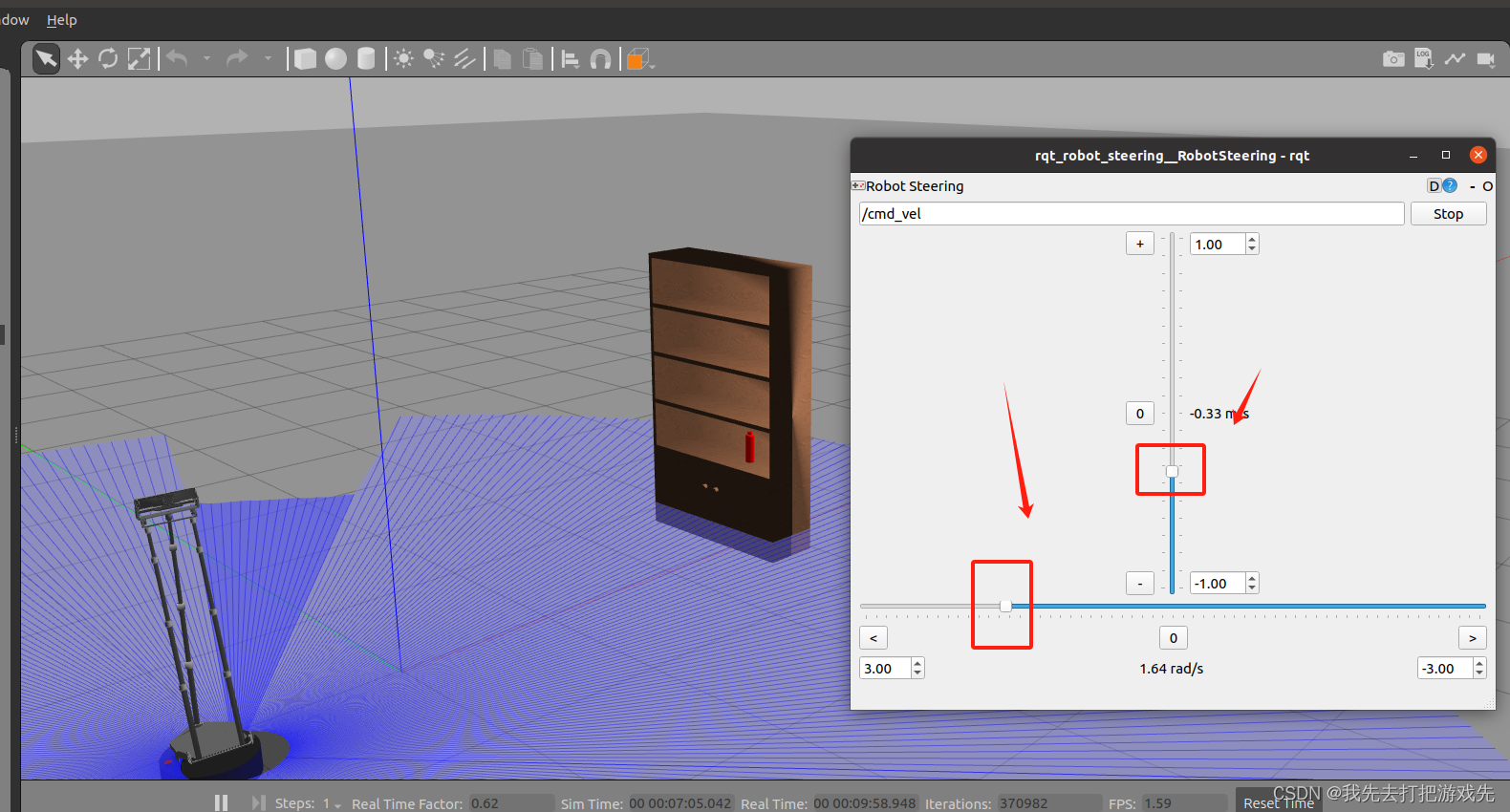
二十一、会出现一个三维界面,这就是仿真环境Gazebo
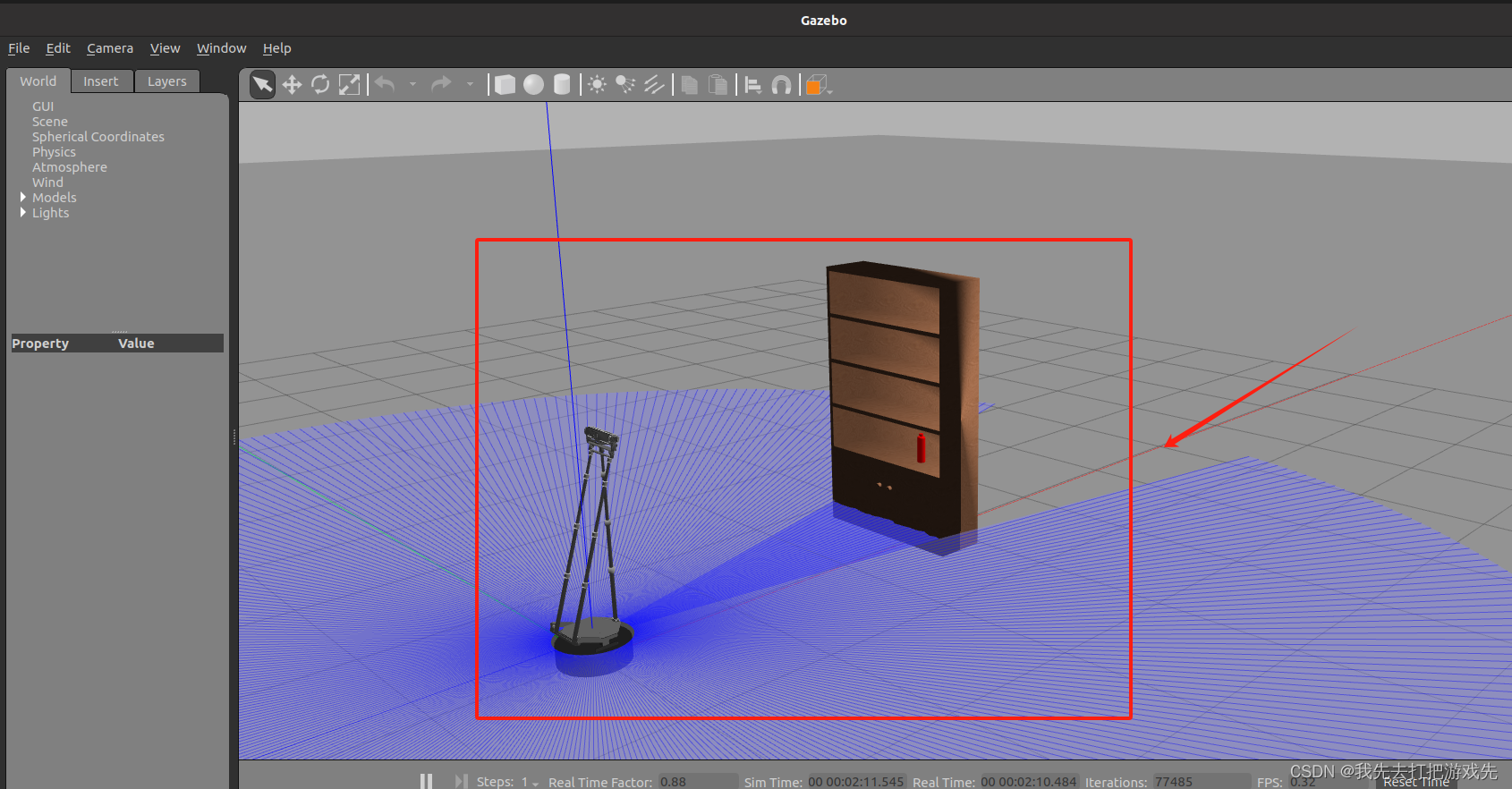
二十二、这是仿真机器人
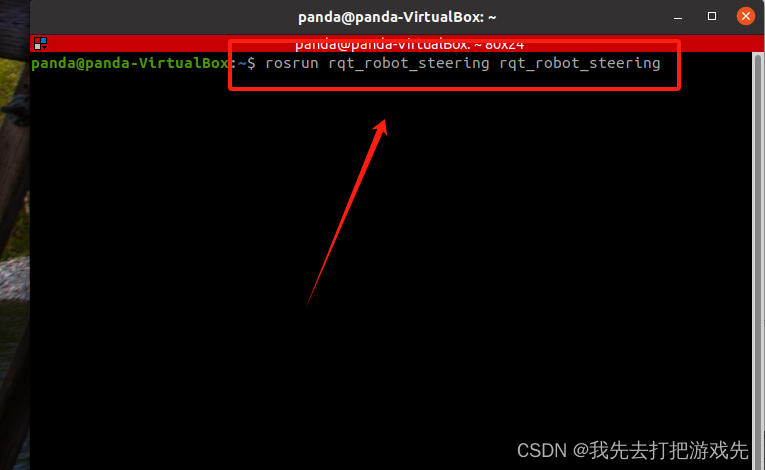
二十三、再打开一个终端,输入 rosrun rqt_robot_steering rqt_robot_steering
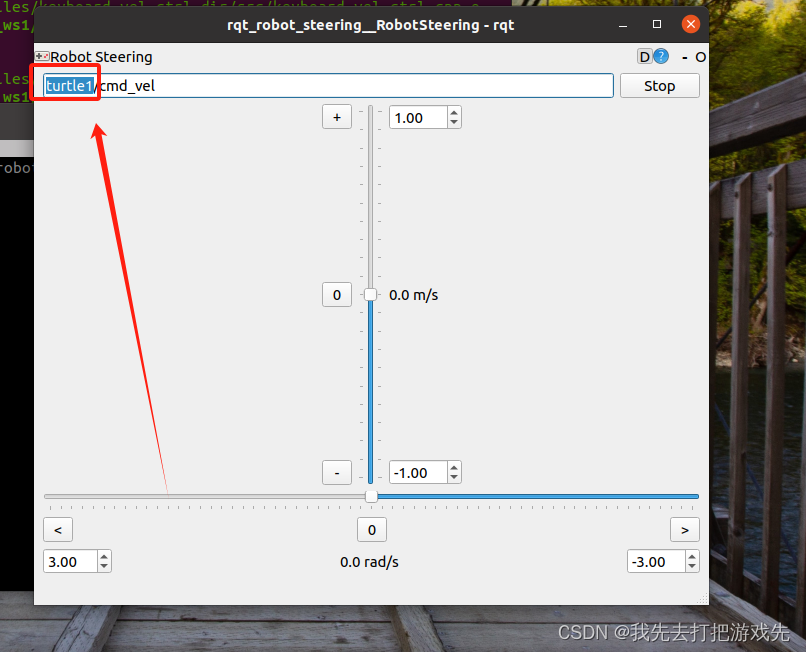
二十四、出现这个速度控制界面
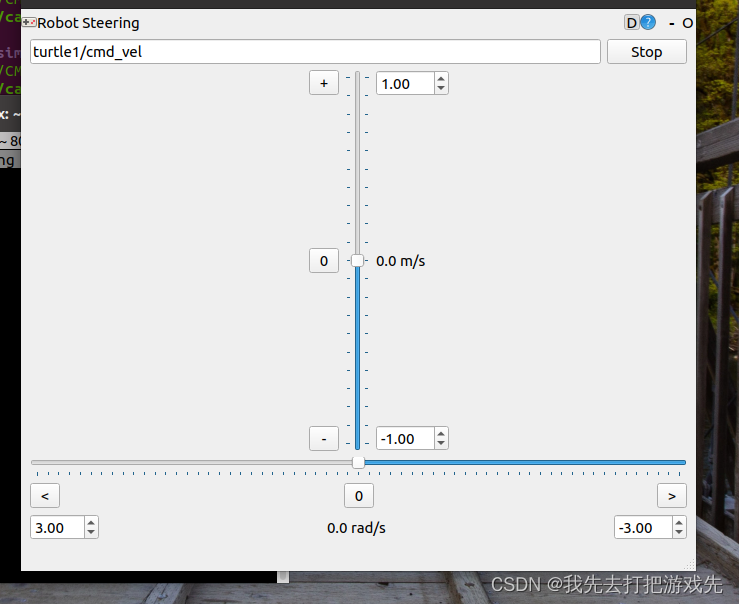
二十五、把前面的turtle1去掉
二十六、拖动速度摇杆,机器人会动
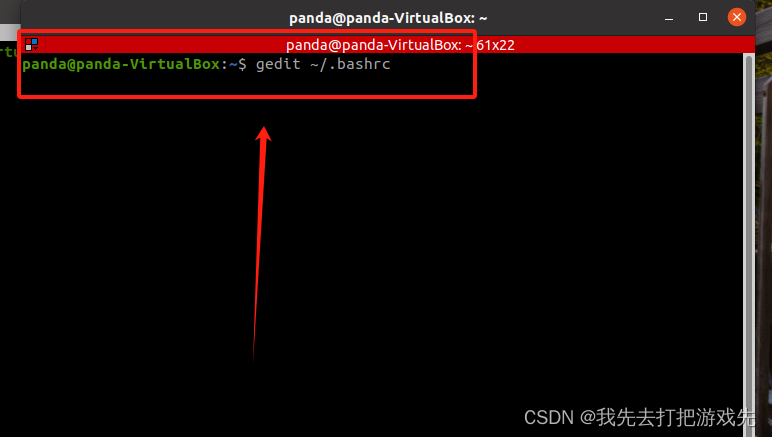
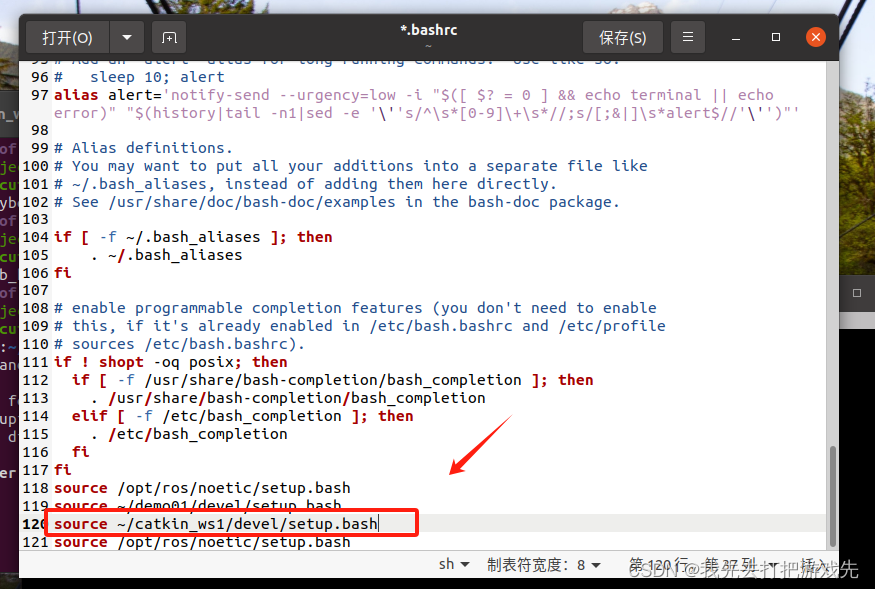
二十七、通常会把设置工作空间环境参数的source指令添加到终端程序初始化的脚本 ~/.bashrc文件中,这样每次打开终端就能马上运行ROS程序了,在终端中输入gedit ~/.bashrc后回车
二十八、在打开的文件末尾添加~/catkin_ws1/devel/setup.bash保存后关闭
文章来源:https://blog.csdn.net/qq_52251819/article/details/135229435
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 优化改进YOLOv8算法之AKConv(可改变核卷积),即插即用的卷积,效果秒杀DSConv
- Vue CLI 设置 publicPath:打包后的应用可部署在任意路径
- 羊奶的奶源,解密优质健康的来源
- HackTheBox - Medium - Linux - BroScience
- 小白入门基础 - Restful
- 在 Centos 7.9 下搭建 Nginx Web 服务器的步骤
- 空间换时间-五秒出解:从900ms到5ms的幕后优化大揭秘!
- 企业公司宣传网站(HTML静态网页项目实战)附源码【从0开始入门到精通】小白向(大学生毕设)大作业 <!DOCTYPE html> <html lang=“en“> <head> <
- 视频异常检测论文笔记
- 「解析」Jetson配置 git服务