STM32-HAL库10-CAN通讯(轮询发送,中断接收)
发布时间:2023年12月17日
STM32-HAL库10-CAN通讯(轮询发送,中断接收)
一、所用材料
自制STM32F407VGT6控制板
串口调试助手X-COM
泥人CAN转USB及其配套上位机软件
二、所学内容
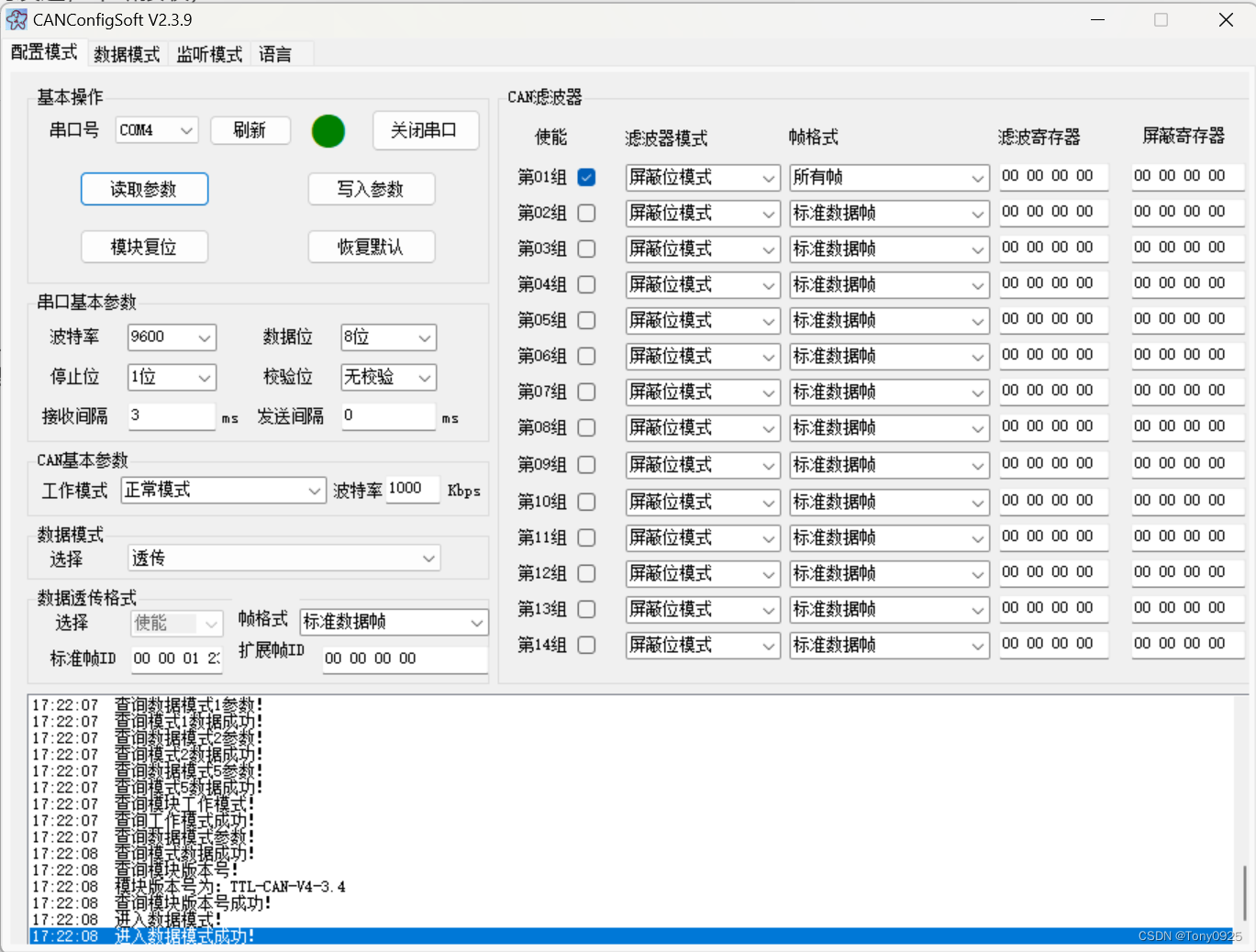
本文所需要实现的目标是,通过泥人CAN转USB,以上位机为主机,向STM32发送相关指令,32控制板在接收到CAN信息后将所接收数据通过串口打印至上位机的串口调试软件。
三、泥人CAN转USB及其上位机配置
四、STM32控制板HAL库配置
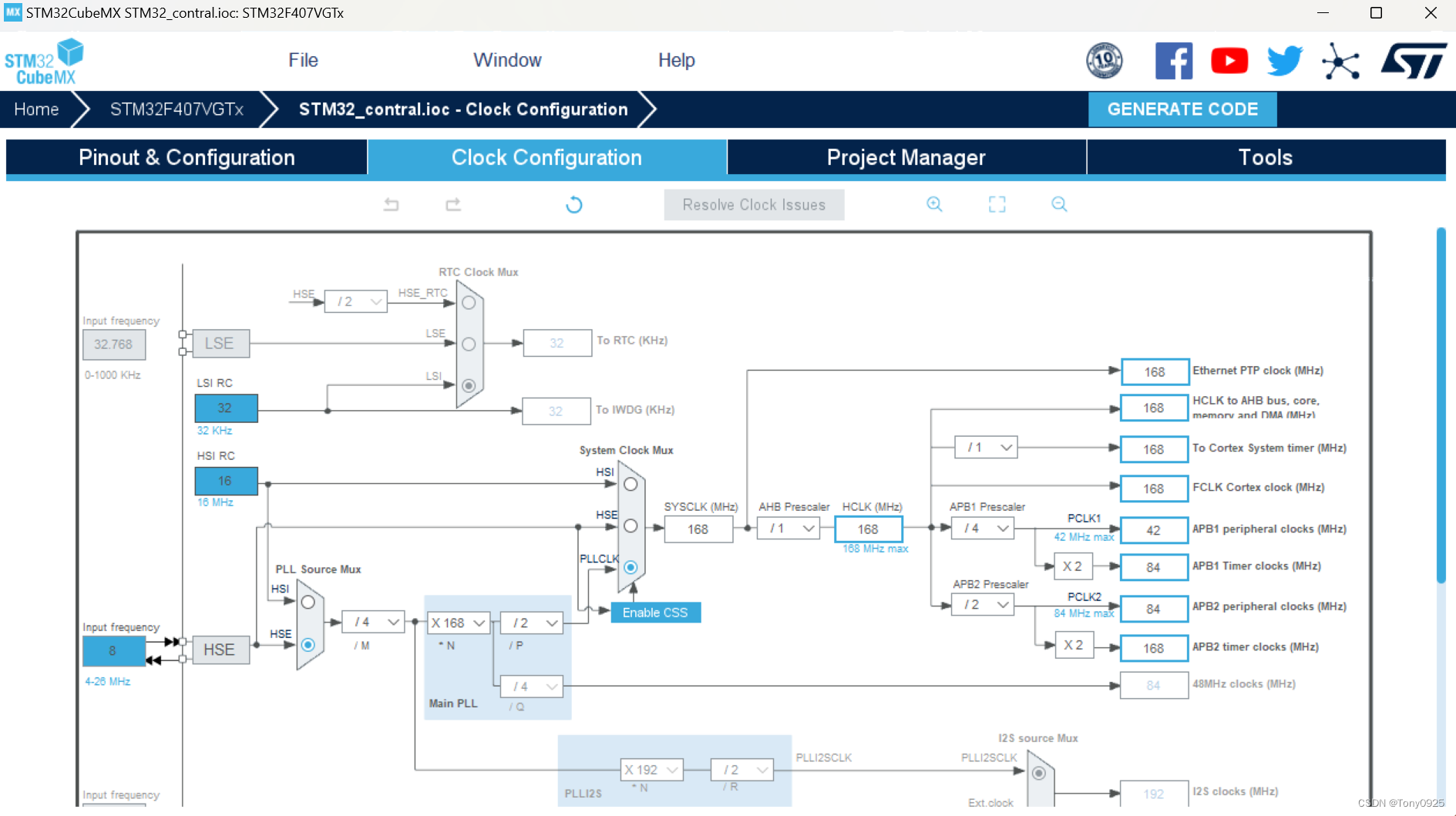
第一步:三件套-RCC,SYS,时钟配置
第二步:串口配置

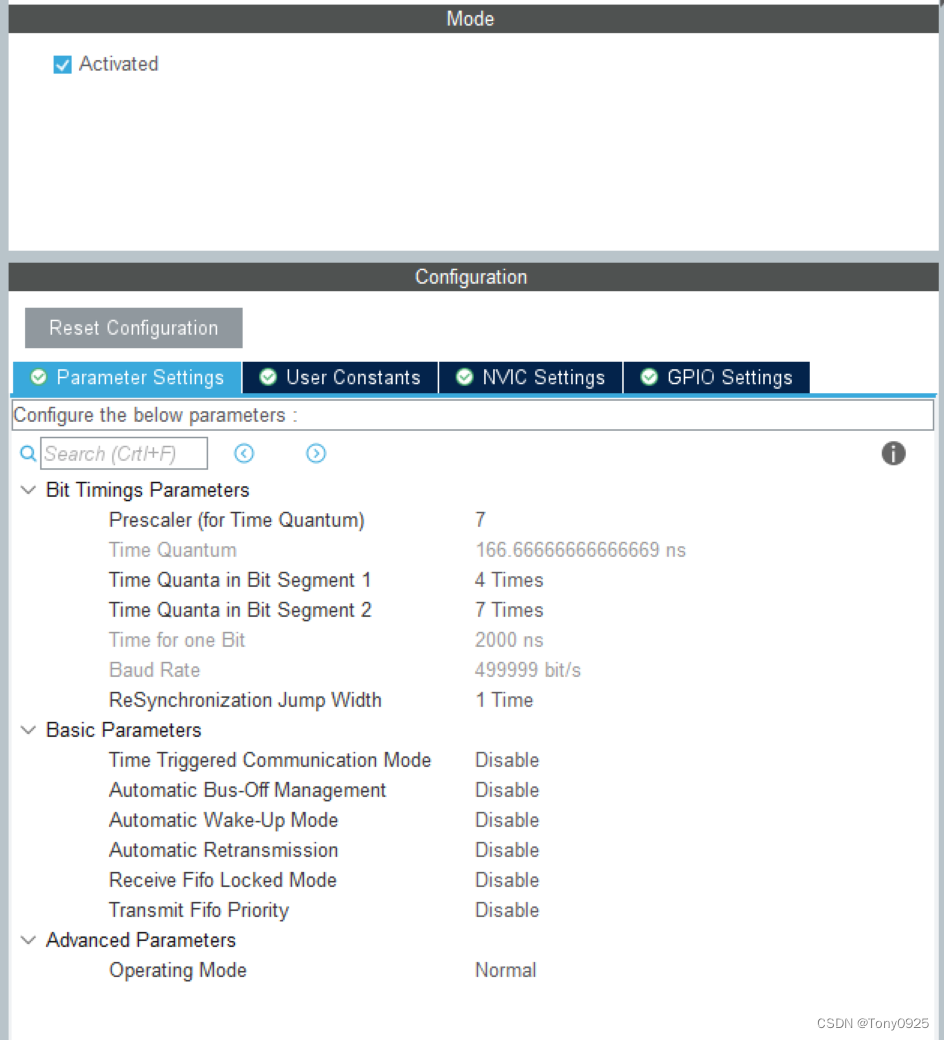
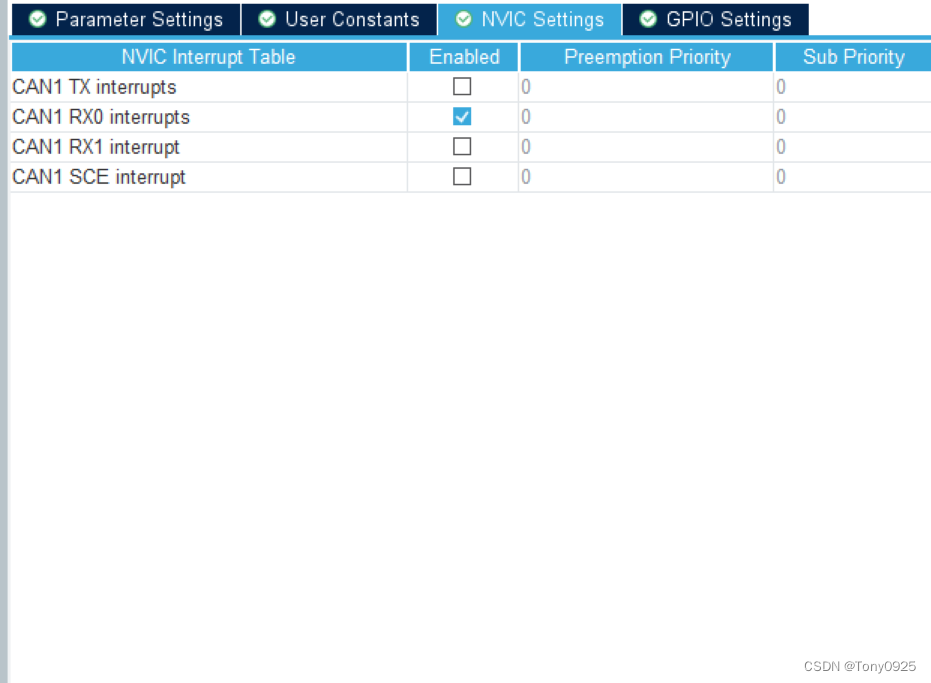
第三步:CAN配置
相比于上一篇内部回传的CAN配置,本次需要更改部分参数,将Operating Mode改为Normal。同时别忘了打开接收中断。
五、MDK5配置
这里偷个懒,直接将实际使用的程序拿来用了,发送函数和接收中断函数等可以直接借鉴使用哈,屎山代码勿喷。
第一步:CAN.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file can.h
* @brief This file contains all the function prototypes for
* the can.c file
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __CAN_H__
#define __CAN_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
extern int32_t X_tar;
extern int now_station;
extern int run_in_can;
extern uint16_t test_time;
extern int32_t encoder1;
extern int32_t encoder2;
/* USER CODE END Includes */
extern CAN_HandleTypeDef hcan1;
extern CAN_HandleTypeDef hcan2;
/* USER CODE BEGIN Private defines */
#define CAN1_FILTER_BANK 0 ///< CAN1过滤器组编号
#define CAN2_FILTER_BANK 14 ///< CAN2过滤器组编号
/* USER CODE END Private defines */
void MX_CAN1_Init(void);
void MX_CAN2_Init(void);
/* USER CODE BEGIN Prototypes */
void CAN_Start_Init(void);
void CAN1Filter_Config(void);
void CAN1Filter_Config(void);
void CAN1_Send_Test(void);
void CAN1_Send(uint8_t* cdata);
void CAN2Filter_Config(void);
void CAN2Filter_Config(void);
void CAN2_Send_Test(void);
void CAN2_Send(uint8_t* cdata);
void GET_encoder1(void);
void GET_encoder2(void);
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /* __CAN_H__ */
第二步:CAN.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file can.c
* @brief This file provides code for the configuration
* of the CAN instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "can.h"
/* USER CODE BEGIN 0 */
#include <stdio.h>
#include "user.h"
#include "usart.h"
#include "gpio.h"
static CAN_TxHeaderTypeDef TxMessage; //CAN发送的消息的消息头
static CAN_RxHeaderTypeDef RxMessage; //CAN接收的消息的消息头
/* USER CODE END 0 */
CAN_HandleTypeDef hcan1;
CAN_HandleTypeDef hcan2;
/* CAN1 init function */
void MX_CAN1_Init(void)
{
/* USER CODE BEGIN CAN1_Init 0 */
/* USER CODE END CAN1_Init 0 */
/* USER CODE BEGIN CAN1_Init 1 */
/* USER CODE END CAN1_Init 1 */
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 7;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_4TQ;
hcan1.Init.TimeSeg2 = CAN_BS2_7TQ;
hcan1.Init.TimeTriggeredMode = DISABLE;
hcan1.Init.AutoBusOff = DISABLE;
hcan1.Init.AutoWakeUp = DISABLE;
hcan1.Init.AutoRetransmission = DISABLE;
hcan1.Init.ReceiveFifoLocked = DISABLE;
hcan1.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN1_Init 2 */
/* USER CODE END CAN1_Init 2 */
}
/* CAN2 init function */
void MX_CAN2_Init(void)
{
/* USER CODE BEGIN CAN2_Init 0 */
/* USER CODE END CAN2_Init 0 */
/* USER CODE BEGIN CAN2_Init 1 */
/* USER CODE END CAN2_Init 1 */
hcan2.Instance = CAN2;
hcan2.Init.Prescaler = 7;
hcan2.Init.Mode = CAN_MODE_NORMAL;
hcan2.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan2.Init.TimeSeg1 = CAN_BS1_4TQ;
hcan2.Init.TimeSeg2 = CAN_BS2_1TQ;
hcan2.Init.TimeTriggeredMode = DISABLE;
hcan2.Init.AutoBusOff = DISABLE;
hcan2.Init.AutoWakeUp = DISABLE;
hcan2.Init.AutoRetransmission = DISABLE;
hcan2.Init.ReceiveFifoLocked = DISABLE;
hcan2.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN2_Init 2 */
/* USER CODE END CAN2_Init 2 */
}
static uint32_t HAL_RCC_CAN1_CLK_ENABLED=0;
void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspInit 0 */
/* USER CODE END CAN1_MspInit 0 */
/* CAN1 clock enable */
HAL_RCC_CAN1_CLK_ENABLED++;
if(HAL_RCC_CAN1_CLK_ENABLED==1){
__HAL_RCC_CAN1_CLK_ENABLE();
}
__HAL_RCC_GPIOB_CLK_ENABLE();
/**CAN1 GPIO Configuration
PB8 ------> CAN1_RX
PB9 ------> CAN1_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* CAN1 interrupt Init */
HAL_NVIC_SetPriority(CAN1_RX0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(CAN1_RX0_IRQn);
/* USER CODE BEGIN CAN1_MspInit 1 */
/* USER CODE END CAN1_MspInit 1 */
}
else if(canHandle->Instance==CAN2)
{
/* USER CODE BEGIN CAN2_MspInit 0 */
/* USER CODE END CAN2_MspInit 0 */
/* CAN2 clock enable */
__HAL_RCC_CAN2_CLK_ENABLE();
HAL_RCC_CAN1_CLK_ENABLED++;
if(HAL_RCC_CAN1_CLK_ENABLED==1){
__HAL_RCC_CAN1_CLK_ENABLE();
}
__HAL_RCC_GPIOB_CLK_ENABLE();
/**CAN2 GPIO Configuration
PB12 ------> CAN2_RX
PB13 ------> CAN2_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN2;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* CAN2 interrupt Init */
HAL_NVIC_SetPriority(CAN2_RX0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(CAN2_RX0_IRQn);
/* USER CODE BEGIN CAN2_MspInit 1 */
/* USER CODE END CAN2_MspInit 1 */
}
}
void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle)
{
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspDeInit 0 */
/* USER CODE END CAN1_MspDeInit 0 */
/* Peripheral clock disable */
HAL_RCC_CAN1_CLK_ENABLED--;
if(HAL_RCC_CAN1_CLK_ENABLED==0){
__HAL_RCC_CAN1_CLK_DISABLE();
}
/**CAN1 GPIO Configuration
PB8 ------> CAN1_RX
PB9 ------> CAN1_TX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_8|GPIO_PIN_9);
/* CAN1 interrupt Deinit */
HAL_NVIC_DisableIRQ(CAN1_RX0_IRQn);
/* USER CODE BEGIN CAN1_MspDeInit 1 */
/* USER CODE END CAN1_MspDeInit 1 */
}
else if(canHandle->Instance==CAN2)
{
/* USER CODE BEGIN CAN2_MspDeInit 0 */
/* USER CODE END CAN2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_CAN2_CLK_DISABLE();
HAL_RCC_CAN1_CLK_ENABLED--;
if(HAL_RCC_CAN1_CLK_ENABLED==0){
__HAL_RCC_CAN1_CLK_DISABLE();
}
/**CAN2 GPIO Configuration
PB12 ------> CAN2_RX
PB13 ------> CAN2_TX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_12|GPIO_PIN_13);
/* CAN2 interrupt Deinit */
HAL_NVIC_DisableIRQ(CAN2_RX0_IRQn);
/* USER CODE BEGIN CAN2_MspDeInit 1 */
/* USER CODE END CAN2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/*******************
接受信息过滤器
*******************/
void CAN1Filter_Config(void)
{
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterBank = CAN1_FILTER_BANK; //CAN过滤器编号,范围0-27
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; //CAN过滤器模式,掩码模式或列表模式
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; //CAN过滤器尺度,16位或32位
sFilterConfig.FilterIdHigh = 0x000 << 5; //32位下,存储要过滤ID的高16位
sFilterConfig.FilterIdLow = 0x0000; //32位下,存储要过滤ID的低16位
sFilterConfig.FilterMaskIdHigh = 0x0000; //掩码模式下,存储的是掩码
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = 0; //报文通过过滤器的匹配后,存储到哪个FIFO
sFilterConfig.FilterActivation = ENABLE; //激活过滤器
sFilterConfig.SlaveStartFilterBank = CAN2_FILTER_BANK;
if (HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
else{ printf("HAL_CAN_ConfigFilter1 is HAL_OK\r\n"); }
}
void CAN2Filter_Config(void)
{
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterBank = CAN2_FILTER_BANK; //CAN过滤器编号,范围0-27
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; //CAN过滤器模式,掩码模式或列表模式
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; //CAN过滤器尺度,16位或32位
sFilterConfig.FilterIdHigh = 0x000 << 5; //32位下,存储要过滤ID的高16位
sFilterConfig.FilterIdLow = 0x0000; //32位下,存储要过滤ID的低16位
sFilterConfig.FilterMaskIdHigh = 0x0000; //掩码模式下,存储的是掩码
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = 0; //报文通过过滤器的匹配后,存储到哪个FIFO
sFilterConfig.FilterActivation = ENABLE; //激活过滤器
sFilterConfig.SlaveStartFilterBank = 0;
if (HAL_CAN_ConfigFilter(&hcan2, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
else{ printf("HAL_CAN_ConfigFilter2 is HAL_OK\r\n"); }
}
/*******************
发送函数
*******************/
void GET_encoder1(void)
{
uint32_t TxMailbox;
uint8_t data[4] = {0x04,0x01,0x01,0x00};
TxMessage.IDE = CAN_ID_STD; //设置ID类型
TxMessage.StdId = 0x01; //设置ID号
TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧
TxMessage.DLC = 4; //设置数据长度
if (HAL_CAN_AddTxMessage(&hcan1, &TxMessage, data, &TxMailbox) != HAL_OK)
{
Error_Handler();
}
}
void GET_encoder2(void)
{
uint32_t TxMailbox;
uint8_t data[4] = {0x04,0x02,0x01,0x00};
TxMessage.IDE = CAN_ID_STD; //设置ID类型
TxMessage.StdId = 0x01; //设置ID号
TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧
TxMessage.DLC = 4; //设置数据长度
if (HAL_CAN_AddTxMessage(&hcan1, &TxMessage, data, &TxMailbox) != HAL_OK)
{
Error_Handler();
}
}
void CAN1_Send_Test(void)
{
uint32_t TxMailbox;
uint8_t data[4] = {0x04,0x01,0x01,0x00};
TxMessage.IDE = CAN_ID_STD; //设置ID类型
TxMessage.StdId = 0x01; //设置ID号
TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧
TxMessage.DLC = 4; //设置数据长度
if (HAL_CAN_AddTxMessage(&hcan1, &TxMessage, data, &TxMailbox) != HAL_OK)
{
Error_Handler();
}
else{ printf("HAL_CAN_AddTxMessage1 is HAL_OK\r\n"); }
}
void CAN1_Send(uint8_t* cdata)
{
uint32_t TxMailbox;
TxMessage.IDE = CAN_ID_STD; //设置ID类型
TxMessage.StdId = 0x122; //设置ID号
TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧
TxMessage.DLC = 8; //设置数据长度
if (HAL_CAN_AddTxMessage(&hcan1, &TxMessage, cdata, &TxMailbox) != HAL_OK)
{
Error_Handler();
}
}
void CAN2_Send_Test(void)
{
uint32_t TxMailbox;
uint8_t data[4] = {0x04,0x01,0x01,0x00};
TxMessage.IDE = CAN_ID_STD; //设置ID类型
TxMessage.StdId = 0x01; //设置ID号
TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧
TxMessage.DLC = 4; //设置数据长度
if (HAL_CAN_AddTxMessage(&hcan2, &TxMessage, data, &TxMailbox) != HAL_OK)
{
Error_Handler();
}
else{ printf("HAL_CAN_AddTxMessage2 is HAL_OK\r\n"); }
}
void CAN2_Send(uint8_t* cdata)
{
uint32_t TxMailbox;
TxMessage.IDE = CAN_ID_STD; //设置ID类型
TxMessage.StdId = 0x111; //设置ID号
TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧
TxMessage.DLC = 8; //设置数据长度
if (HAL_CAN_AddTxMessage(&hcan2, &TxMessage, cdata, &TxMailbox) != HAL_OK)
{
Error_Handler();
}
}
/*******************
CAN启动函数
*******************/
void CAN_Start_Init(void)
{
if (HAL_CAN_Start(&hcan1) != HAL_OK)
{
Error_Handler();
}
else{ printf("HAL_CAN1_Star1 is HAL_OK\r\n"); }
if (HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK) {
Error_Handler();
}
else{ printf("HAL_CAN1_ActivateNotification is HAL_OK\r\n"); }
if (HAL_CAN_Start(&hcan2) != HAL_OK)
{
Error_Handler();
}
else{ printf("HAL_CAN2_Start is HAL_OK\r\n"); }
if (HAL_CAN_ActivateNotification(&hcan2, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK) {
Error_Handler();
}
else{ printf("HAL_CAN2_ActivateNotification is HAL_OK\r\n"); }
}
/*******************
中断接受
*******************/
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
uint8_t data[8];
HAL_StatusTypeDef status;
status = HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxMessage, data);
// if (HAL_OK == status)
// {
// printf("--->Data Receieve!\r\n");
// printf("RxMessage.StdId is %#x\r\n", RxMessage.StdId);
// printf("data[0] is 0x%02x\r\n", data[0]);
// printf("data[1] is 0x%02x\r\n", data[1]);
// printf("data[2] is 0x%02x\r\n", data[2]);
// printf("data[3] is 0x%02x\r\n", data[3]);
// printf("data[4] is 0x%02x\r\n", data[4]);
// printf("data[5] is 0x%02x\r\n", data[5]);
// printf("data[6] is 0x%02x\r\n", data[6]);
// printf("data[7] is 0x%02x\r\n", data[7]);
// printf("<---\r\n");
// }
if (hcan->Instance == hcan1.Instance)//数据来自编码器
{
//来自编码器1的回信
if (data[1] == 0x01)
{
if (data[0] == 0x07 && data[2] == 0x01) //此时为查询当前位置的返回值
{
encoder1 = data[3] + data[4]*256 + data[5]*65536;
printf("编码器1的当前位置为:%d \r\n",encoder1);
}
else //此时为其他命令的返回数据
{
switch (data[2])
{
case 0x02: //此时为返回新设置的编码器ID
break;
case 0x03: //此时为返回新设置的波特率
break;
case 0x04: //此时为返回新设置的编码器运行模式
break;
case 0x05: //此时为返回新设置的编码器自动回传时间
break;
case 0x06: //当前位置设为零点
break;
case 0x07: //此时为返回新设置的编码器旋转方向
break;
case 0x0A: //此时为返回角速度值
break;
case 0x0B: //此时为返回新设置的编码器角速度采样值
break;
case 0x0C: //此时为返回新设置的编码器当前圈数
break;
case 0x0D: //此时为返回新设置的编码器当前位置值
break;
case 0x0F: //此时为返回新设置的编码器当前圈数值
break;
default:
break;
}
}
}
//来自编码器2的回信
else if (data[1] == 0x02)
{
if (data[0] == 0x07 && data[2] == 0x01) //此时为查询当前位置的返回值
{
encoder2 = data[3] + data[4]*256 + data[5]*65536;
printf("编码器2的当前位置为:%d \r\n",encoder2);
}
else //此时为其他命令的返回数据
{
switch (data[2])
{
case 0x02: //此时为返回新设置的编码器ID
break;
case 0x03: //此时为返回新设置的波特率
break;
case 0x04: //此时为返回新设置的编码器运行模式
break;
case 0x05: //此时为返回新设置的编码器自动回传时间
break;
case 0x06: //当前位置设为零点
break;
case 0x07: //此时为返回新设置的编码器旋转方向
break;
case 0x0A: //此时为返回角速度值
break;
case 0x0B: //此时为返回新设置的编码器角速度采样值
break;
case 0x0C: //此时为返回新设置的编码器当前圈数
break;
case 0x0D: //此时为返回新设置的编码器当前位置值
break;
case 0x0F: //此时为返回新设置的编码器当前圈数值
break;
default:
break;
}
}
}
}
else if (hcan->Instance == hcan2.Instance)//数据来自上位机
{
if (HAL_OK == status)
{
if (data[0] == 0xba && data[7] == 0xab)
{
switch (data[2])
{
case 0x01://数据来自上位机,得到目标位置值
if (run_in_can == 1)
{
X_tar = data[3]*128*128*128 + data[4]*128*128 + data[5]*128 + data[6];
printf("目标位置为:%d mm\r\n",X_tar);
now_station = 3 ;
}
break;
case 0x02://数据来自上位机,控制输出端口
GPIO_OUT_contral(data[5] , data[6]);
break;
case 0x03://数据来自上位机,选择CAN作为控制器
now_station = 2 ;
printf("已选取CAN上位机为控制器\r\n");
break;
case 0x04://数据来自上位机,停止信号
now_station = 0 ;
printf("停止信号发起\r\n");
break;
case 0x05://数据来自上位机,进行电机正反转测试
if (run_in_can == 1)
{
now_station = 5 ;
printf("进行电机正反转测试\r\n");
}
break;
default:
break;
}
}
}
}
}
/* USER CODE END 1 */
文章来源:https://blog.csdn.net/qq_45854134/article/details/135035184
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!