ROS-rqt工具箱
概念
ROS基于 QT 框架,针对机器人开发提供了一系列可视化的工具,这些工具的集合就是rqt
作用
可以方便的实现 ROS 可视化调试,并且在同一窗口中打开多个部件,提高开发效率,优化用户体验。
组成
rqt 工具箱组成有三大部分
-
rqt——核心实现,开发人员无需关注
-
rqt_common_plugins——rqt 中常用的工具套件
-
rqt_robot_plugins——运行中和机器人交互的插件(比如: rviz)
1.rqt安装及使用
1.安装
- 一般只要安装的是desktop-full版本就会自带工具箱
- 如果需要安装可以以如下方式安装
sudo apt-get install ros-melodic-rqt sudo apt-get install ros-melodic-rqt-common-plugins
2.启动
先启动roscore
rqt的启动方式有两种:
- 方式1:
rqt - 方式2:r
osrun rqt_gui rqt_gui
3.基本使用
启动 rqt 之后,可以通过 plugins 添加所需的插件
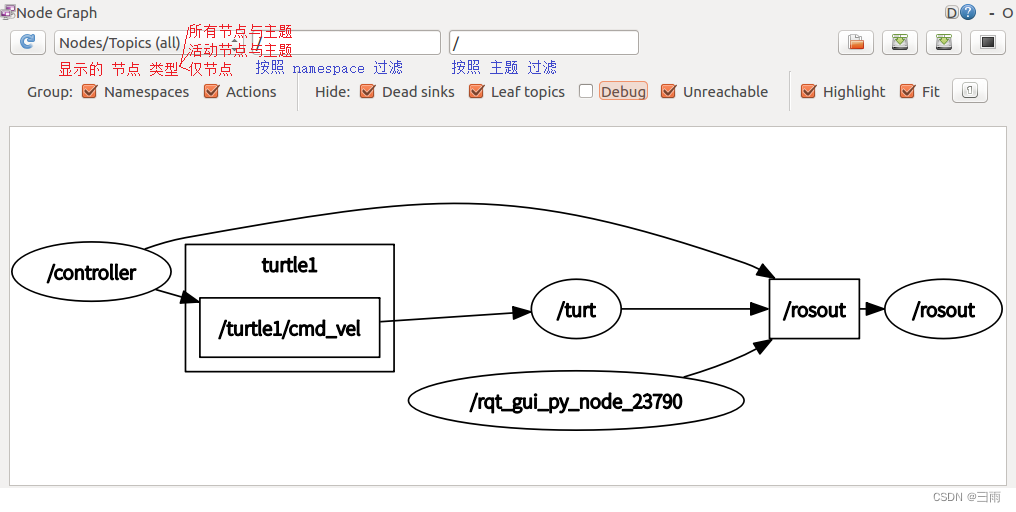
2.rqt常用插件:rqt_graph
简介:可视化显示计算图
启动:可以在 rqt 的 plugins 中添加,或者使用rqt_graph启动
3.rqt常用插件:rqt_console
简介:rqt_console 是 ROS 中用于显示和过滤日志的图形化插件
准备:编写 Node 节点输出各个级别的日志信息
/*
ROS 节点:输出各种级别的日志信息
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
ros::init(argc,argv,"log_demo");
ros::NodeHandle nh;
ros::Rate r(0.3);
while (ros::ok())
{
ROS_DEBUG("Debug message d");
ROS_INFO("Info message oooooooooooooo");
ROS_WARN("Warn message wwwww");
ROS_ERROR("Erroe message EEEEEEEEEEEEEEEEEEEE");
ROS_FATAL("Fatal message FFFFFFFFFFFFFFFFFFFFFFFFFFFFF");
r.sleep();
}
return 0;
}
启动:可以在 rqt 的 plugins 中添加,或者使用rqt_console启动

4.rqt常用插件:rqt_plot
简介:图形绘制插件,可以以 2D 绘图的方式绘制发布在 topic 上的数据
准备:启动 turtlesim 乌龟节点与键盘控制节点,通过 rqt_plot 获取乌龟位姿
启动:可以在 rqt 的 plugins 中添加,或者使用rqt_plot启动

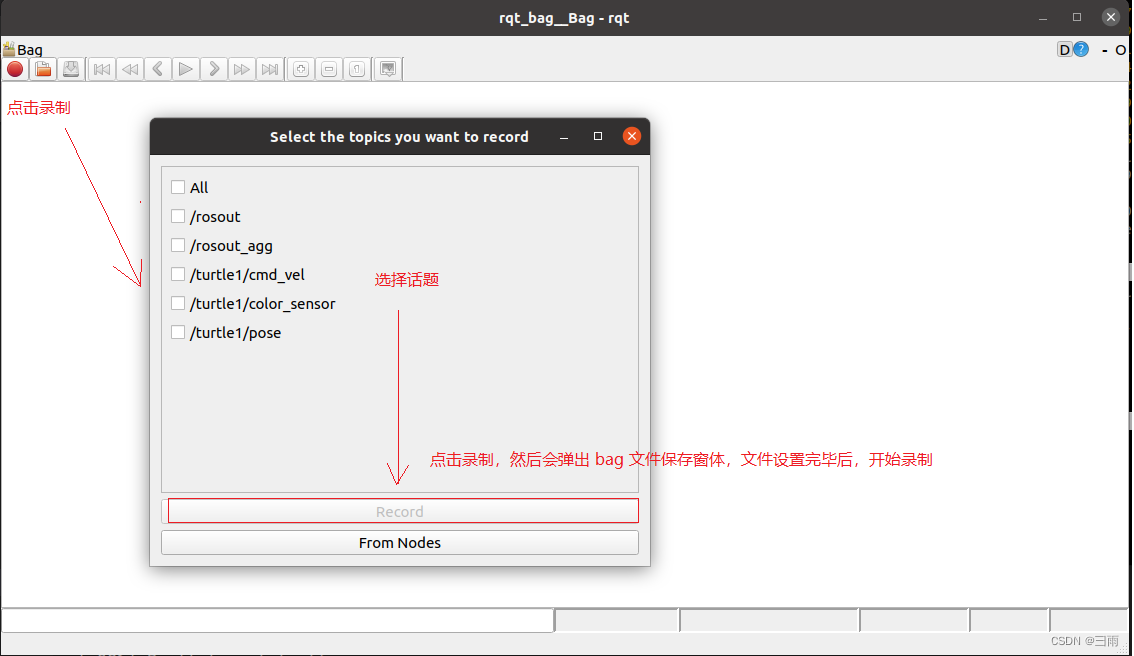
5.rqt常用插件:rqt_bag
简介:录制和重放 bag 文件的图形化插件
准备:启动 turtlesim 乌龟节点与键盘控制节点
启动:可以在 rqt 的 plugins 中添加,或者使用rqt_bag启动
录制:
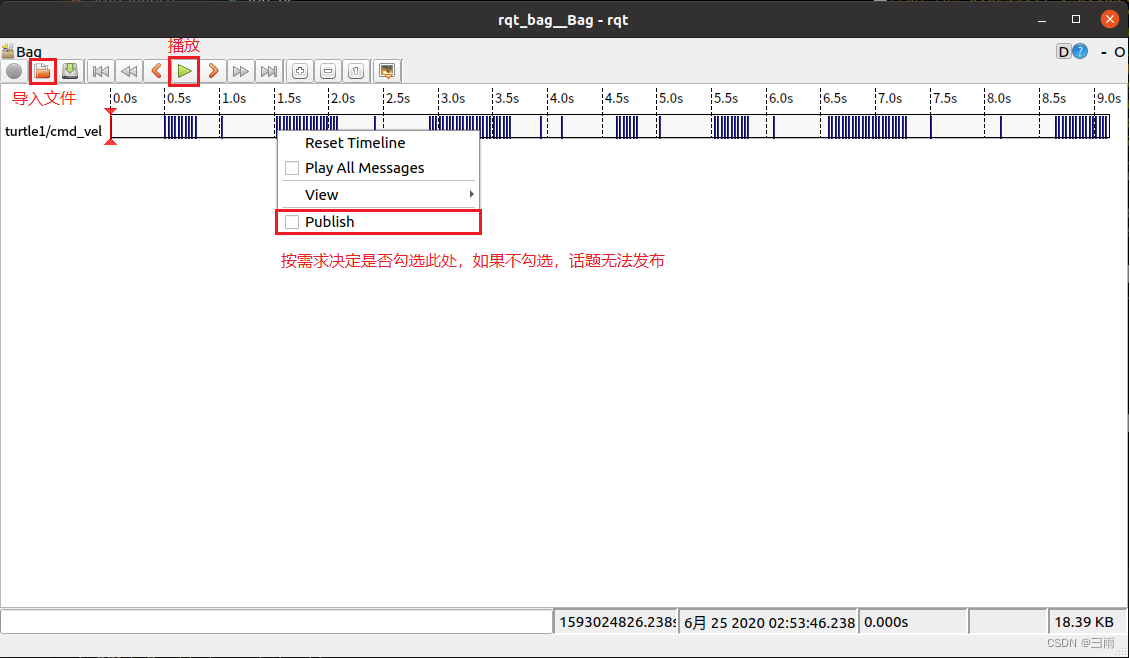
重放:
参考:
[1]Autolabor-ROS机器人入门课程《ROS理论与实践》季基础教程
[2]【Autolabor初级教程】ROS机器人入门
[3]胡春旭.ROS机器人开发实践[M].机械工业出版社,2018.
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!