FPN网络的实现原理详解
发布时间:2024年01月11日
1 前言
FPN网络是一种常见的特征融合模块,在很多模型中都有运用,今天我们就结合代码和论文详细的搞清楚它到底是怎么一回事。
2 原理
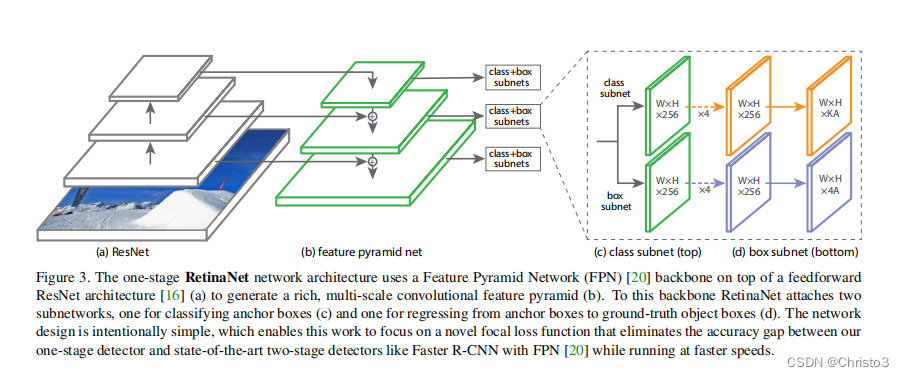
原理直接看这一张图就可以了,很直观主要就是把对不同层的特征进行融合,重点还是在于代码的理解。
3 代码详解
import torch.nn as nn
import torch
import math
import torch.utils.model_zoo as model_zoo
from torchvision.ops import nms
# from retinanet.utils import BasicBlock, Bottleneck, BBoxTransform, ClipBoxes
# from retinanet.anchors import Anchors
# from retinanet import losses
class PyramidFeatures(nn.Module):
def __init__(self, C3_size, C4_size, C5_size, feature_size=256):
super(PyramidFeatures, self).__init__()
# upsample C5 to get P5 from the FPN paper
self.P5_1 = nn.Conv2d(C5_size, feature_size, kernel_size=1, stride=1, padding=0)
self.P5_upsampled = nn.Upsample(scale_factor=2, mode='nearest')
#将C5的特征图尺寸放大2倍用于跟C4相加
self.P5_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=1, padding=1)
# add P5 elementwise to C4
self.P4_1 = nn.Conv2d(C4_size, feature_size, kernel_size=1, stride=1, padding=0)
self.P4_upsampled = nn.Upsample(scale_factor=2, mode='nearest')
self.P4_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=1, padding=1)
# add P4 elementwise to C3
self.P3_1 = nn.Conv2d(C3_size, feature_size, kernel_size=1, stride=1, padding=0)
self.P3_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=1, padding=1)
# "P6 is obtained via a 3x3 stride-2 conv on C5"
self.P6 = nn.Conv2d(C5_size, feature_size, kernel_size=3, stride=2, padding=1)
# "P7 is computed by applying ReLU followed by a 3x3 stride-2 conv on P6"
self.P7_1 = nn.ReLU()
self.P7_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=2, padding=1)
def forward(self, inputs):
#注意理解这里的inputs,其其表示的是一个列表
C3, C4, C5 = inputs
P5_x = self.P5_1(C5)
P5_upsampled_x = self.P5_upsampled(P5_x)
P5_x = self.P5_2(P5_x)
P4_x = self.P4_1(C4)
P4_x = P5_upsampled_x + P4_x
P4_upsampled_x = self.P4_upsampled(P4_x)
P4_x = self.P4_2(P4_x)
P3_x = self.P3_1(C3)
P3_x = P3_x + P4_upsampled_x
P3_x = self.P3_2(P3_x)
P6_x = self.P6(C5)
P7_x = self.P7_1(P6_x)
P7_x = self.P7_2(P7_x)
return [P3_x, P4_x, P5_x, P6_x, P7_x]
if __name__ == '__main__':
model = PyramidFeatures(32, 64, 96)
print(model)
##这里假设输入是三层不同尺寸的特征图,输入的形状是[batch_size, 256, height, width]
input = [torch.randn(1, 32, 640, 640), torch.randn(1, 64, 320, 320), torch.randn(1, 96, 160, 160)]
out = model(input)
print(out)
文章来源:https://blog.csdn.net/weixin_41552975/article/details/135530473
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 爆满!!TikTok Shop美区闭门研讨会完美收官,座无虚席!
- Minitab的单因子方差分析的结果
- 【Linux】shell命令以及运行原理
- 鸿蒙开发实战--DevEco Studio真机调试方法
- 关于uview-ui的u-tabs标签滑块不居中的问题
- 20240109-补 二叉树被感染的时间
- 解锁绝对安全:上海迅软DSE加密系统,让盗窃者措手不及
- 【温故而知新】HTML5新标签canvas、MathML
- PTA QQ帐户的申请与登陆
- 7 Series FPGAs Transceivers Wizard(3.6) ip核接收数据正确性判断