单片机外设矩阵键盘之线反转法识别原理与示例
发布时间:2023年12月27日
单片机外设矩阵键盘之线反转法识别原理与示例
1.概述
这篇文章主要介绍单片机接收 4X4矩阵键盘发出的指令,做出对应的反馈。其中主要介绍矩阵键盘线反转方式的识别原理和实操。
2.矩阵键盘线反转识别原理
2.1.矩阵键盘硬件接线原理
矩阵键盘的硬件接线方式有多种,下面介绍的是常用的矩阵式接线。
4X4矩阵键盘由4行和4列构成,行和列分别为两层金属线的薄膜,中间加一层绝缘层,在每个按键的位置有一个开孔,当按下某个位置的按键的时候行薄膜片和列薄膜片就会相贴合,此时就会有电流导通。通过检测导通电流的行和列的位置确定该按键被按下。

2.2.线反转识别原理
1.线反转识别原理介绍
线反转识别的设计非常巧妙,简化了代码的复杂度和冗余度。首先识别列号,然后在识别行号,经过两次识别确定按键位置,因此称为线反转识别。
线反转识别步骤如下
- 设置列识别模式
- 行为低4位,列为高4位,将行全部设置为0,列全部设置为1,十六进制值为
0xf0
- 行为低4位,列为高4位,将行全部设置为0,列全部设置为1,十六进制值为
- 识别列号
- 当按键按下的时候,某列的值就会变为0,因此可以获取对应列号,例如按下第一列 1110
- 反转 设置行识别模式
- 行为低4位,列为高4位,将行全部设置为1,列全部设置为0,十六进制值为
0x0f
- 行为低4位,列为高4位,将行全部设置为1,列全部设置为0,十六进制值为
- 识别行号
- 当按键按下的时候,某行的值就会变为0,因此可以获取对应行号,例如按下第一行 1110
- 行号 + 列号 = 按键号
- 将行号与列号做或运算得到一个8位二进制数值,转为十六进制就是按键对应的键码
2.线反转识别举例说明
上面介绍了线反转识别的原理后,下面在通过一个例子掌握如何从原理转化为实际结果,示例中用1号按键举例,其他按键码值计算方式相同。
计算1号按键键码示例
根据上图的4X4接线图计算1号按键的键码,图中 KEYIN1~KEYIN4 是行,KEYOUT1~KEYOUT4是列。
-
设置列识别模式
- 将
KEYIN1~KEYIN4全部设置为低电平模式,二进制就是0000,KEYOUT1~KEYOUT4全部设置为高电平模式,二进制就是1111,列为高4位,行为低4位,因此组合后一个8位二进制就是:1111 0000
- 将
-
识别列号
- 按下1号按键,1号按键的接线是第一列,得到的列二进制就是
1110,行的二进制还是0000, 组合后一个8位二进制就是:1110 0000
- 按下1号按键,1号按键的接线是第一列,得到的列二进制就是
-
反转 设置行识别模式
- 将
KEYIN1~KEYIN4全部设置为高电平模式,二进制就是1111,KEYOUT1~KEYOUT4全部设置为低电平模式,二进制就是0000,列为高4位,行为低4位,因此组合后一个8位二进制就是:0000 1111
- 将
-
识别行号
- 按下1号按键,1号按键的接线是第一行,得到的行二进制就是
1110,列的二进制还是0000, 组合后一个8位二进制就是:0000 1110
- 按下1号按键,1号按键的接线是第一行,得到的行二进制就是
-
行号 + 列号 = 按键号
- 将行号与列号做
或运算(1110 0000 | 0000 1110)得到一个8位二进制数值1110 1110,转为十六进制0xEE
- 将行号与列号做
3.矩阵键盘点亮LED灯实验
实验目标
在程序中接收键盘按键的码值,对码值进行判断,控制LED灯打开和关闭。
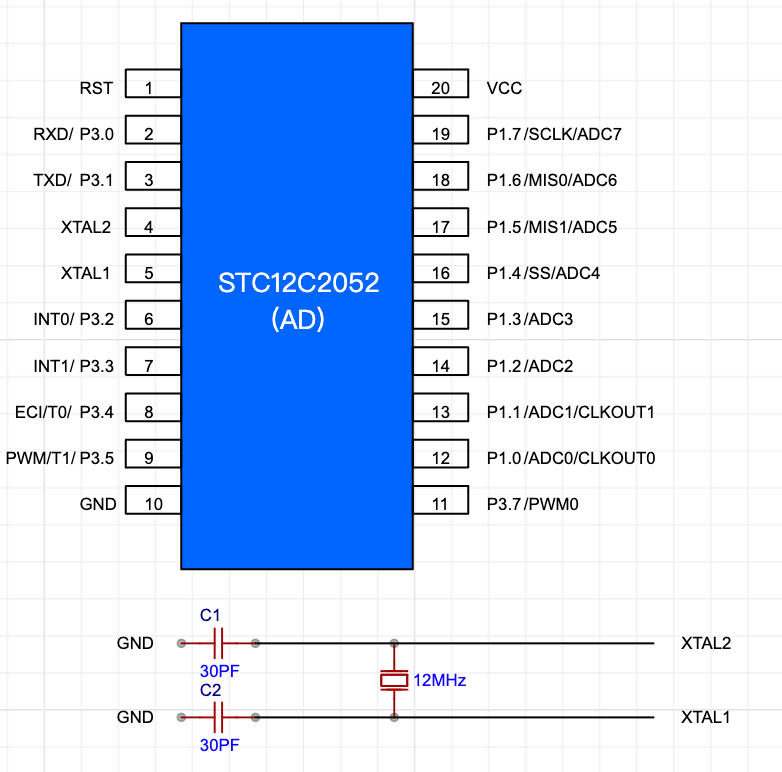
硬件电路原理
- LED灯正极接20号VCC引脚,负极接11号P3.7引脚
- 键盘排线上有标号,1号对应12号P1.0引脚依次递增,8号对应19号P1.7引脚
核心代码介绍
KEY()函数的作用就是通过线反转法识别按键的键值,然后通过程序作出相应的动作。该函数将上面线翻转原理做了实现。
/*
函数名:线翻转法读取键盘按键值
调 用:? = Key (void);
参 数:无
返回值:0~0xff
结 果:连接Px接口的键盘读出返回值
备 注:
*/
unsigned char Key (void){//键盘处理函数
unsigned char a,b,c;//定义3个变量
//设置列识别模式:行为低4位,列为高4位,将行全部设置为0,列全部设置为1,二进制为:11110000,十六进制值为 0xf0
KEY = 0xf0;
if(KEY != 0xf0){ //查寻键盘口的值是否变化
DELAY_MS (20);//延时20毫秒,去除按键抖动
if(KEY != 0xf0){//有键按下处理
a = KEY;//键值放入寄存器a
}
//翻转设置行识别模式:行为低4位,列为高4位,将行全部设置为1,列全部设置为0,二进制为:00001111,十六进制值为 0x0f
KEY = 0x0f;
c = KEY;//将第二次取得值放入寄存器c
a = a|c;//将两个数据相或
switch(a){//对比数据值
case 0xee: b = 1; break;//对比得 到的键值给b一个应用数据
case 0xed: b = 2; break;
case 0xeb: b = 3; break;
case 0xe7: b = 4; break;
case 0xde: b = 5; break;
case 0xdd: b = 6; break;
case 0xdb: b = 7; break;
case 0xd7: b = 8; break;
case 0xbe: b = 9; break;
case 0xbd: b = 10; break;
case 0xbb: b = 11; break;
case 0xb7: b = 12; break;
case 0x7e: b = 13; break;
case 0x7d: b = 14; break;
case 0x7b: b = 15; break;
case 0x77: b = 16; break;
default: b = 0; break;//键值错误处理
}
}
return (b);//将b作为返回值
}
完整代码
/*
程序名:线翻转法操作矩阵键盘
编写人:bruce
编写时间:2023年12月
硬件支持:STC12C2052AD系列
接口说明:
修改日志:
NO.1-
*/
#include <STC12C2052AD.H> //STC12Cx052或STC12Cx052AD系列单片机头文件
sbit LED = P3 ^ 7;
#define KEY P1
/*
函数名:毫秒级CPU延时函数
调 用:DELAY_MS (?);
参 数:1~65535(参数不可为0)
返回值:无
结 果:占用CPU方式延时与参数数值相同的毫秒时间
备 注:应用于1T单片机时i<600,应用于12T单片机时i<125
*/
void DELAY_MS (unsigned int a){
unsigned int i;
while( a-- != 0){
for(i = 0; i < 600; i++);
}
}
/*
函数名:线翻转法读取键盘按键值
调 用:? = Key (void);
参 数:无
返回值:0~0xff
结 果:连接Px接口的键盘读出返回值
备 注:
*/
unsigned char Key (void){//键盘处理函数
unsigned char a,b,c;//定义3个变量
//设置列识别模式:行为低4位,列为高4位,将行全部设置为0,列全部设置为1,二进制为:11110000,十六进制值为 0xf0
KEY = 0xf0;
if(KEY != 0xf0){ //查寻键盘口的值是否变化
DELAY_MS (20);//延时20毫秒,去除按键抖动
if(KEY != 0xf0){//有键按下处理
a = KEY;//键值放入寄存器a
}
//翻转设置行识别模式:行为低4位,列为高4位,将行全部设置为1,列全部设置为0,二进制为:00001111,十六进制值为 0x0f
KEY = 0x0f;
c = KEY;//将第二次取得值放入寄存器c
a = a|c;//将两个数据相或
switch(a){//对比数据值
case 0xee: b = 1; break;//对比得 到的键值给b一个应用数据
case 0xed: b = 2; break;
case 0xeb: b = 3; break;
case 0xe7: b = 4; break;
case 0xde: b = 5; break;
case 0xdd: b = 6; break;
case 0xdb: b = 7; break;
case 0xd7: b = 8; break;
case 0xbe: b = 9; break;
case 0xbd: b = 10; break;
case 0xbb: b = 11; break;
case 0xb7: b = 12; break;
case 0x7e: b = 13; break;
case 0x7d: b = 14; break;
case 0x7b: b = 15; break;
case 0x77: b = 16; break;
default: b = 0; break;//键值错误处理
}
}
return (b);//将b作为返回值
}
void main (void){ //主程序
while(1){
if(Key() == 1){
LED = 0; //取LED相反状态
}
if(Key() == 2){
LED = 1; //取LED相反状态
}
}
}
文章来源:https://blog.csdn.net/m0_38039437/article/details/135225329
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 百倍量化之Dbcd中性策略
- 第十五届蓝桥杯单片机组备赛——中断系统与外部中断应用
- 【REMB 】翻译:草案remb-03
- 月薪高达6W,多家大厂急招鸿蒙开发工程师,现在转还来得及吗?
- 【虹科干货】无模式数据库的利与弊
- x-cmd pkg | trdsql - 能对 CSV、LTSV、JSON 和 TBLN 执行 SQL 查询的工具
- Mysql需要了解的常用命令
- vue上传文件加进度条,fake-progress一起使用
- 视图的作用及可更改性详解
- 接口测试——精通Postman测试工具