Matlab 使用 DH table 建立的 robot 和实际不符
发布时间:2024年01月12日
机器人仿真
想借助 matlab robotics toolbox 来仿真机器人,但是直接输入自己的 DH table 显示出来的 robot 和实际不情况不符。
DH table 建立 robot
Build Manipulator Robot Using Kinematic DH Parameters
主要使用 setFixedTransform,DH table 中都是数值,不带变量
robot = rigidBodyTree;
bodies = cell(6,1);
joints = cell(6,1);
for i = 1:6
bodies{i} = rigidBody(['body' num2str(i)]);
joints{i} = rigidBodyJoint(['jnt' num2str(i)],"revolute");
setFixedTransform(joints{i},dhparams(i,:),"dh");
bodies{i}.Joint = joints{i};
if i == 1 % Add first body to base
addBody(robot,bodies{i},"base")
else % Add current body to previous body by name
addBody(robot,bodies{i},bodies{i-1}.Name)
end
end
原因一 theta 角度中的 固定偏置 默认被忽略
setFixedTransform 会默认忽略 旋转关节 theta 角度中的固定偏置,看帮助文档
The theta input is ignored when specifying the fixed transformation between joints because that angle is dependent on the joint configuration.
由于固定忽略偏置,需要手动设置 home position,并在后续计算中,对 theta 角度手动加上这个偏置
robot.Bodies{2}.Joint.HomePosition=-pi/2;
robot.Bodies{4}.Joint.HomePosition=pi/2;
原因二 参数错了
检查 DH table 中的 角度 与 长度 是不是错了,尤其是长度部分的数值。
原因二 DH table 建立方式不符合matlab标准
检查 DH table 建立方法,常见有两种,参考下面两个作者的书
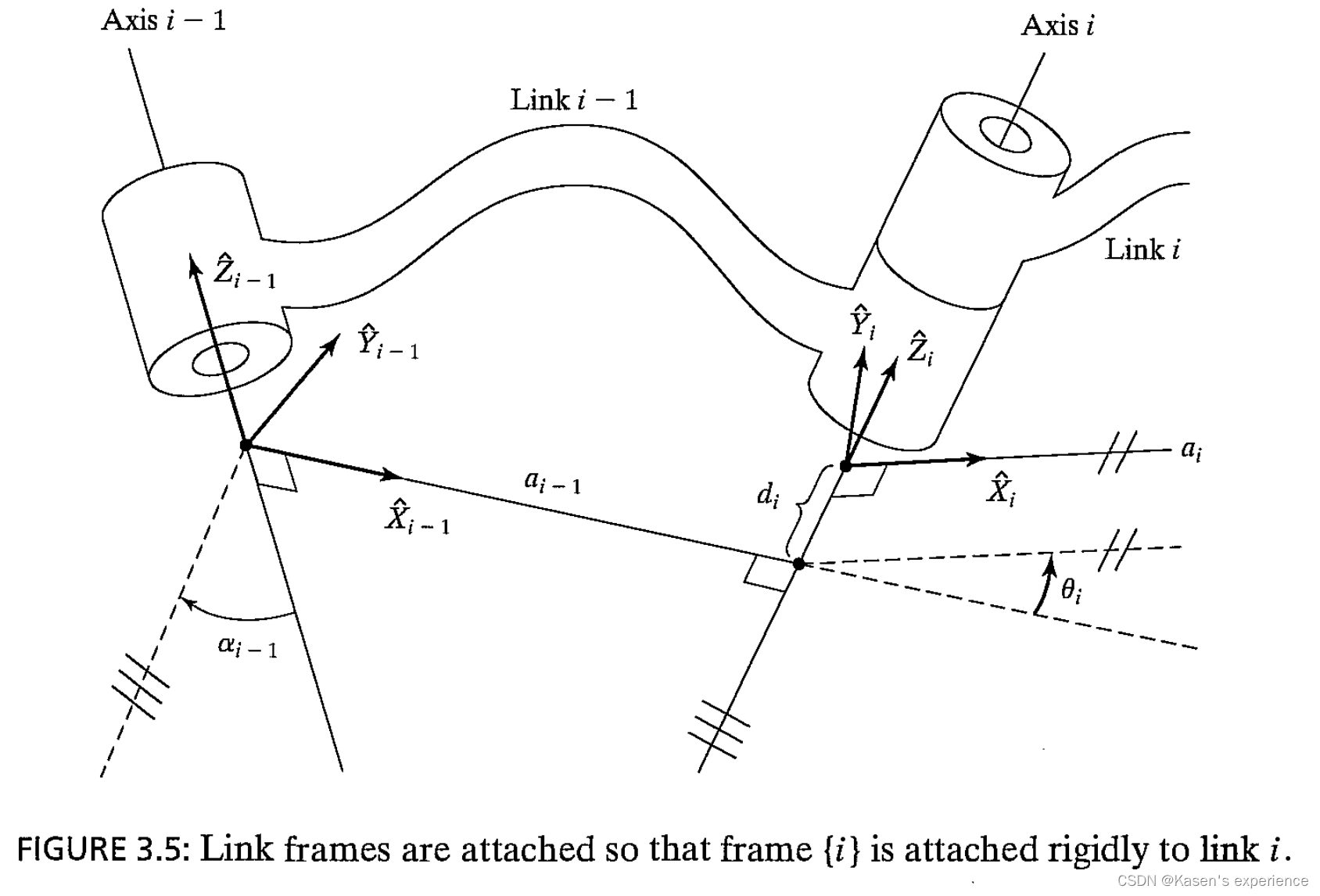
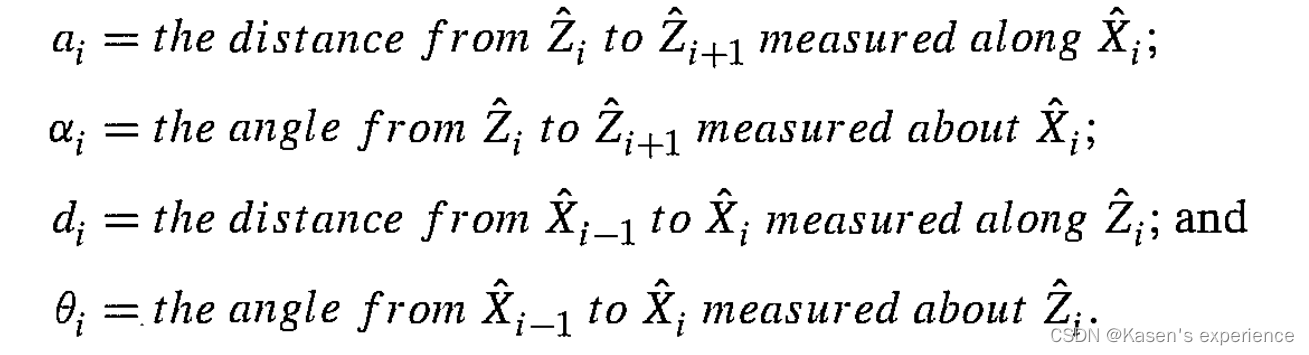
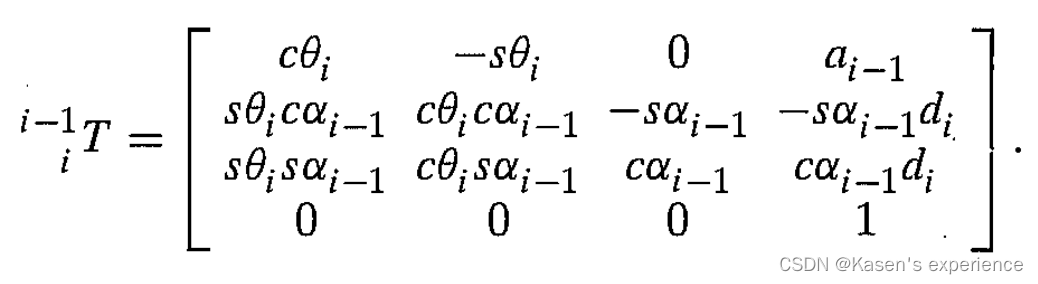
- John J. Craig ----- Introduction to Robotics Mechanics and Control
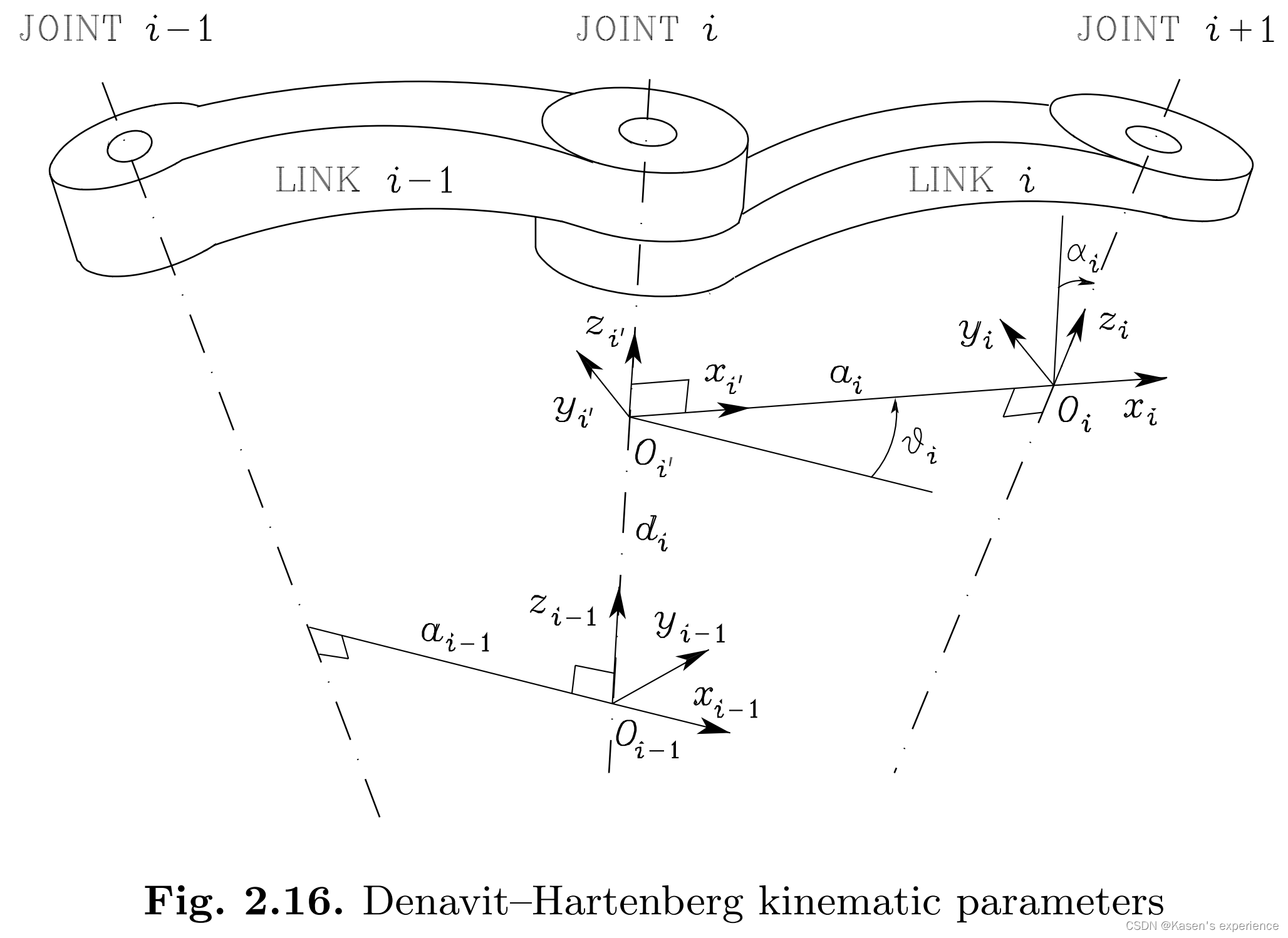
- Bruno Siciliano ----- Robotics, Modeling, Planning and Control
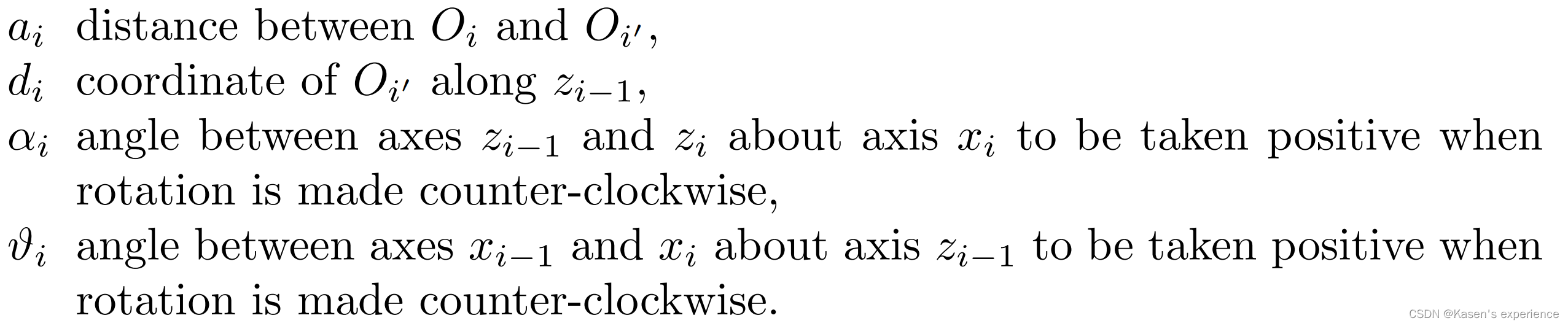
Matlab setFixedTransform 采用 Siciliano方法,帮助手册有写
- A — Length of the common normal line between the two z-axes, which is perpendicular to both axes
- α — Angle of rotation for the common normal
- d — Offset along the z-axis in the normal direction, from parent to child
- θ — Angle of rotation for the x-axis along the previous z-axis
Craig
Siciliano

文章来源:https://blog.csdn.net/jh1513/article/details/135547635
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 解决国内 github.com 打不开的准确方法
- Linux操作系统——进程控制(一) 进程创建和进程终止
- 第十章 面向对象编程(高级)
- tomcat是什么?它有什么功能和特性?它值不值得我们去学习?我们该如何去学习呢?
- 科普帖:什么是IaaS?与SaaS、PaaS有何不同
- 参加考试的最大学生数(LeetCode日记)
- 虚拟机Windows Server 2012 与ubuntu的安装与布置
- Linux内核之红黑树详解(1)
- 【提示学习论文五】Conditional Prompt Learning for Vision-Language Models论文原理及复现工作
- 背单词——冰雹猜想