基于STM32CubeMX创建FreeRTOS—以STM32F429为例
目录
3.1.1 使用ARMCC 5编译器时的printf重映射方法
?
1. 实验任务
利用STM32CubeMX,创建MDK工程,STM32CubeMX移植FreeRTOS。
开发环境准备:
Win11、MDK5、STM32CubeMX、STM32F429IGT6开发板
STM32CubeMX v6.10
2. 使用STM32CubeMX创建基础工程
2.1 打开STM32CubeMX

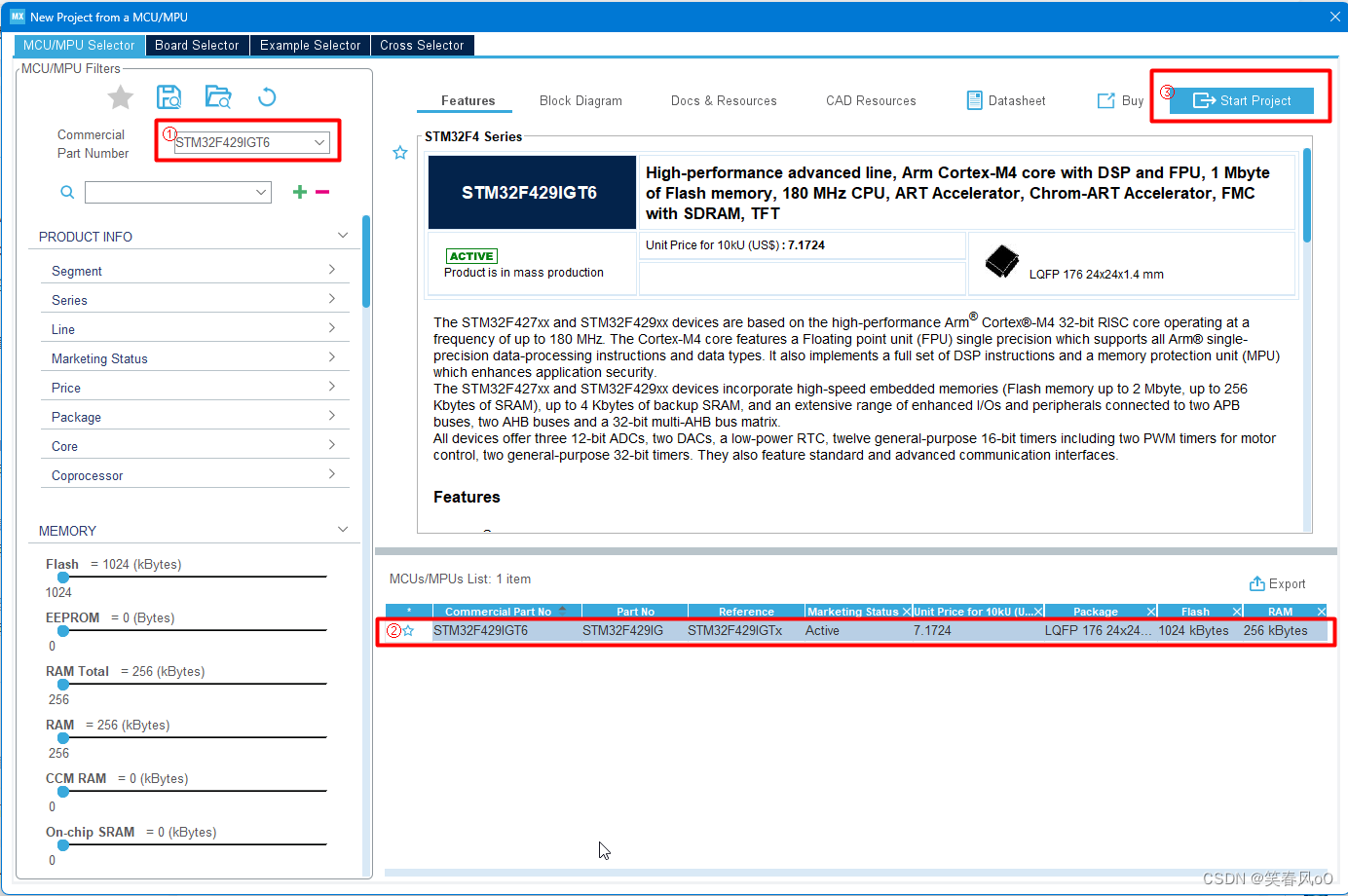
2.2 创建新项目
MCU型号选择STM32F429IGT6,开始项目。
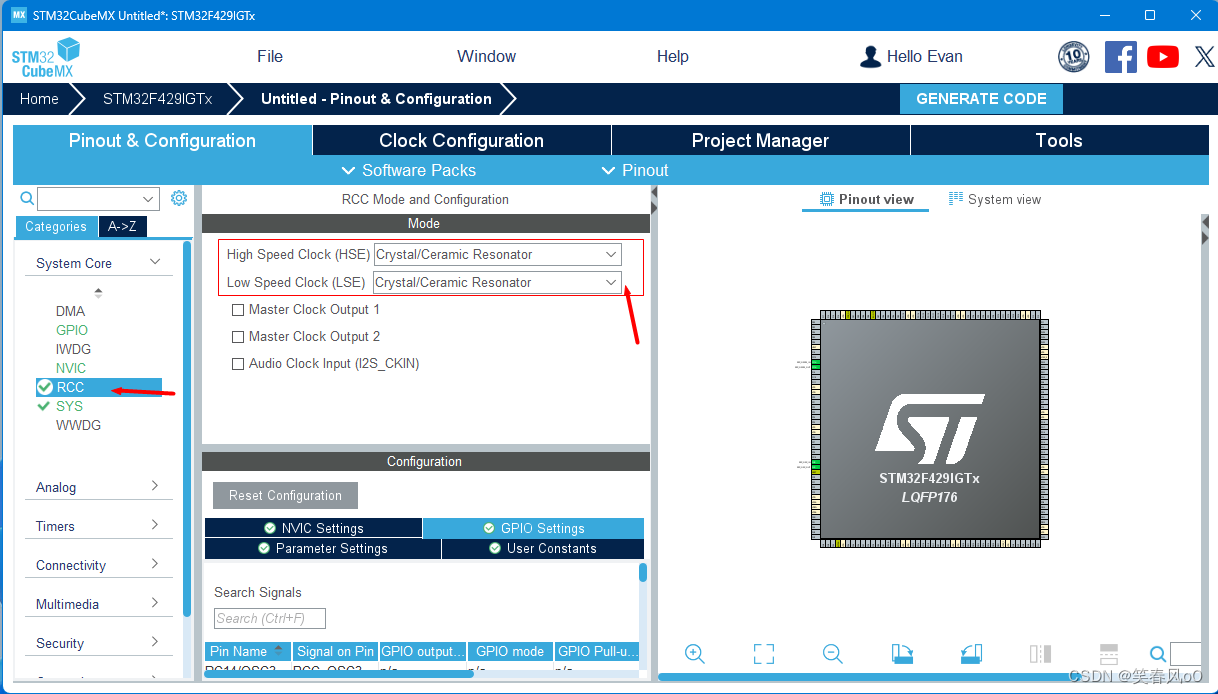
2.3 时钟设置
选择使用外部高速时钟,时钟源为外部晶振(25MHz),配置系统时钟,根据外部晶振频率,将系统时钟配置到180MHz。
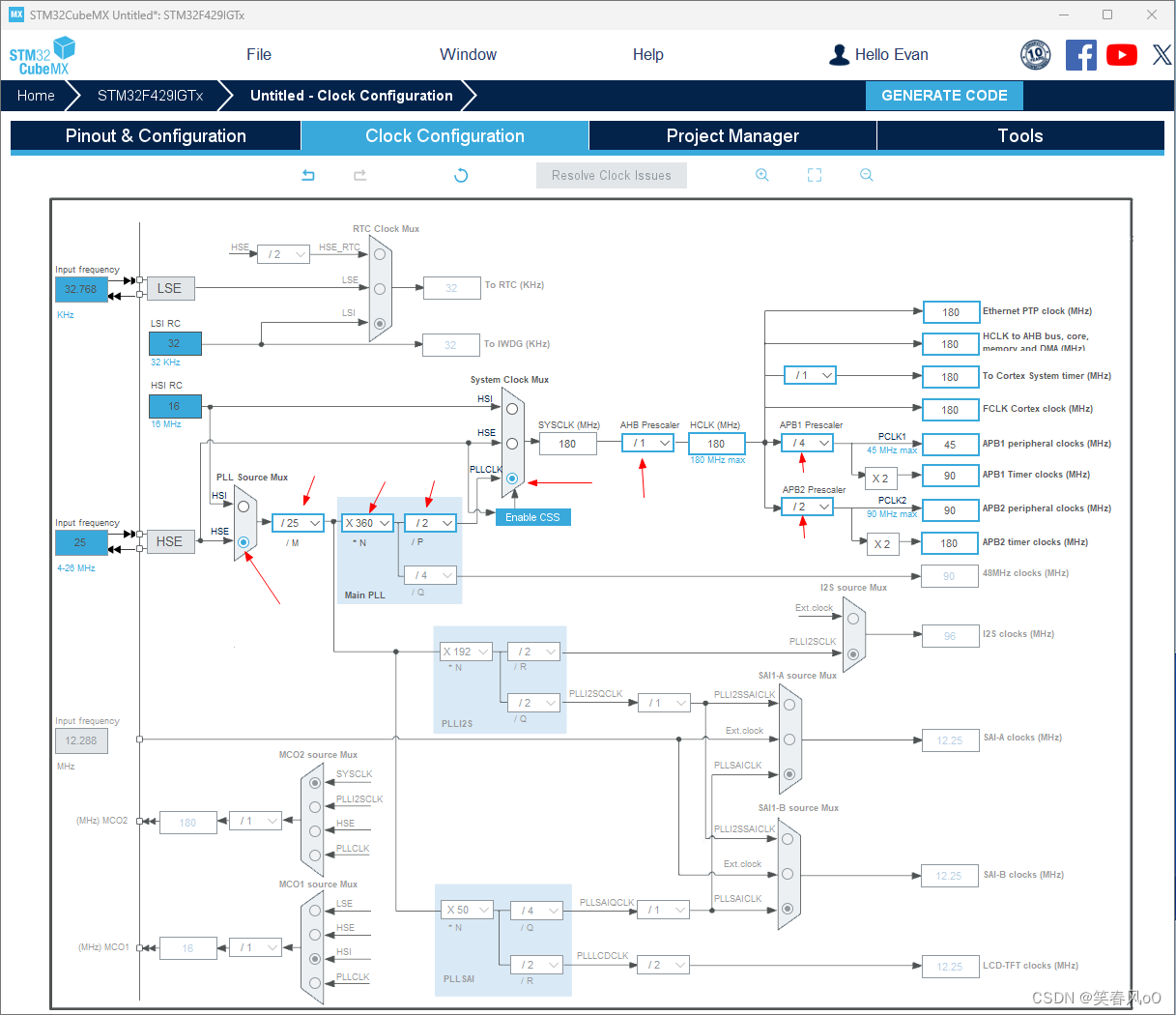
2.4 时钟配置树
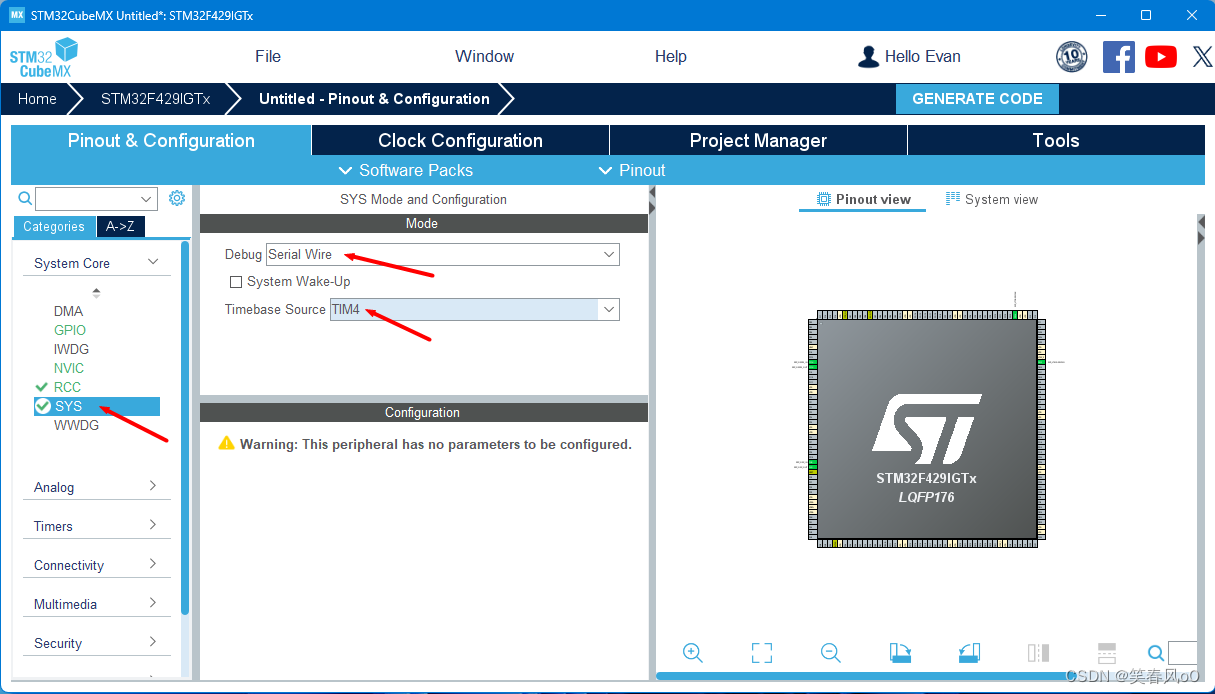
2.5 修改时钟基准,打开串行调试
- FreeRTOS使用systick系统嘀嗒定时器当作心跳,此处须修改HAL库的时钟基准。
- 由于FreeRTOS和HAL库不能同时使用SysTick定时器,将HAL库的定时器改成TIM4
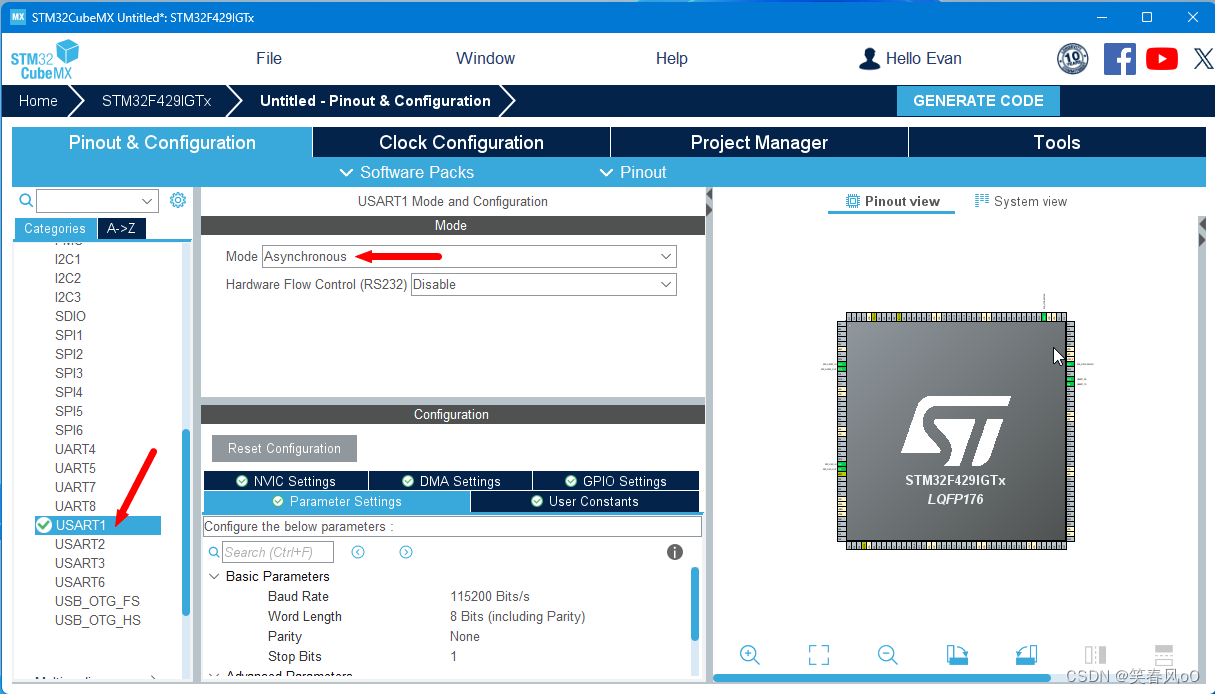
2.6 配置串口
采用异步通信方式,通讯参数此处为默认值。
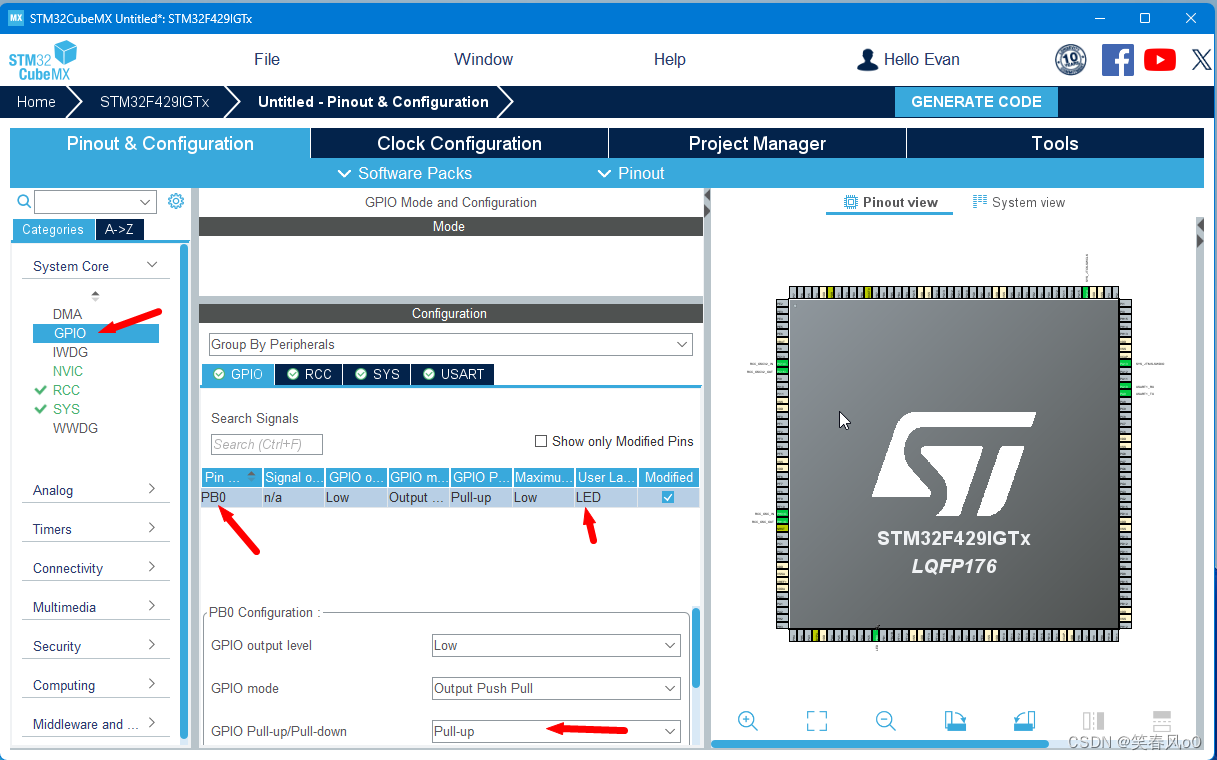
2.7 配置状态指示灯
?
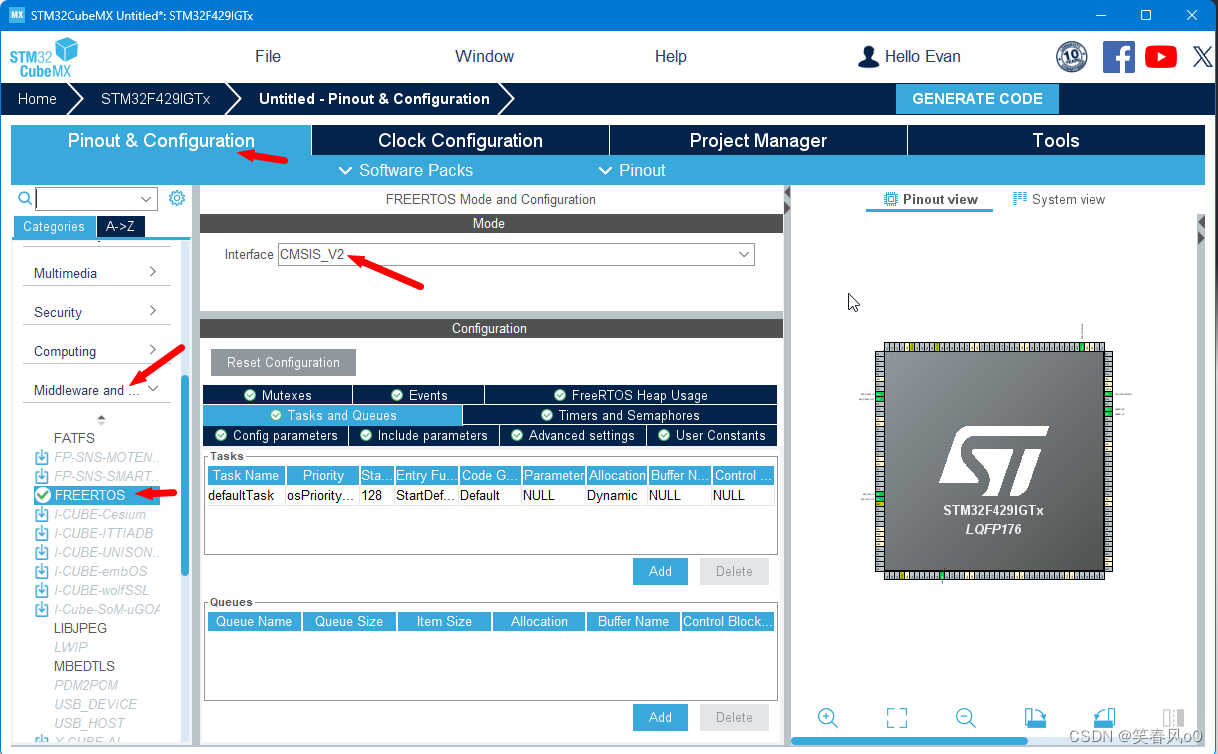
2.8 FreeRTOS配置
选择Middleware-FreeRTOS
Interface中选择CMSIS_V2
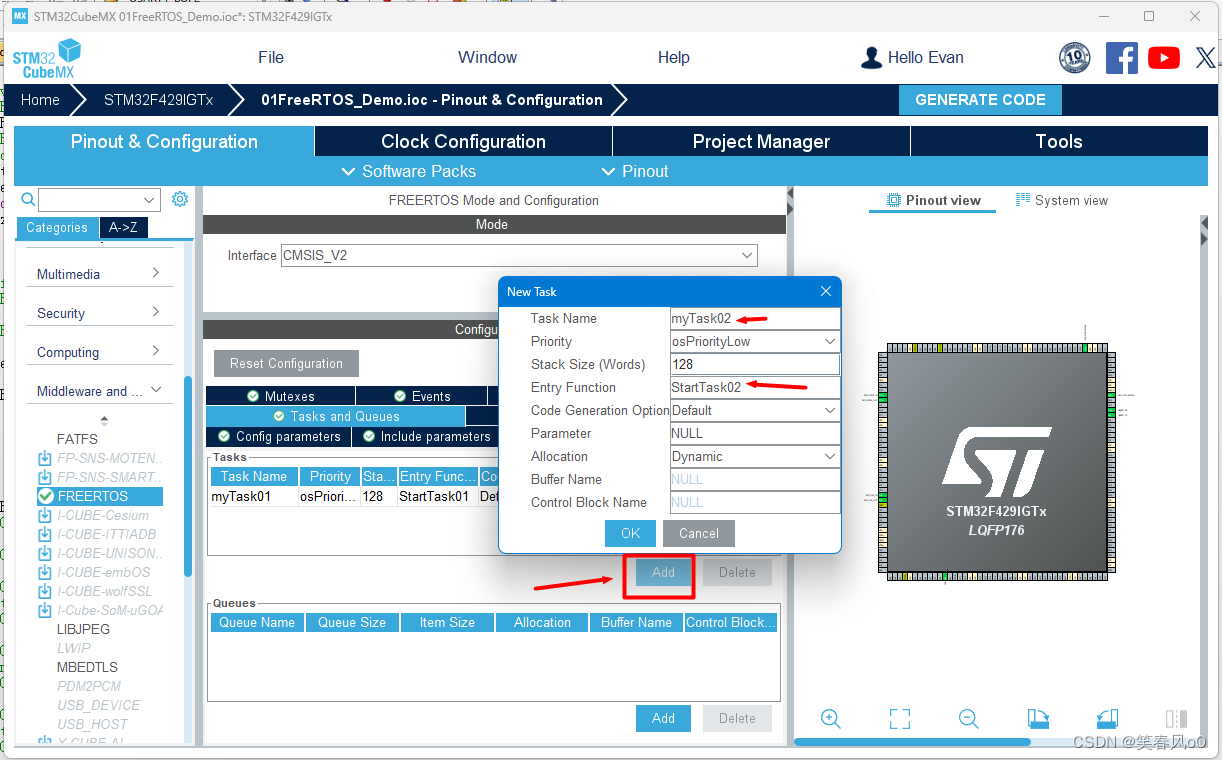
建立双任务:
任务1:LED指示灯闪烁
任务2:串口打印输出
提示:留意下串口中断的问题,由于FreeRTOS只允许5以上的中断级别,需要中断的话请设置大于等于5的值。
?
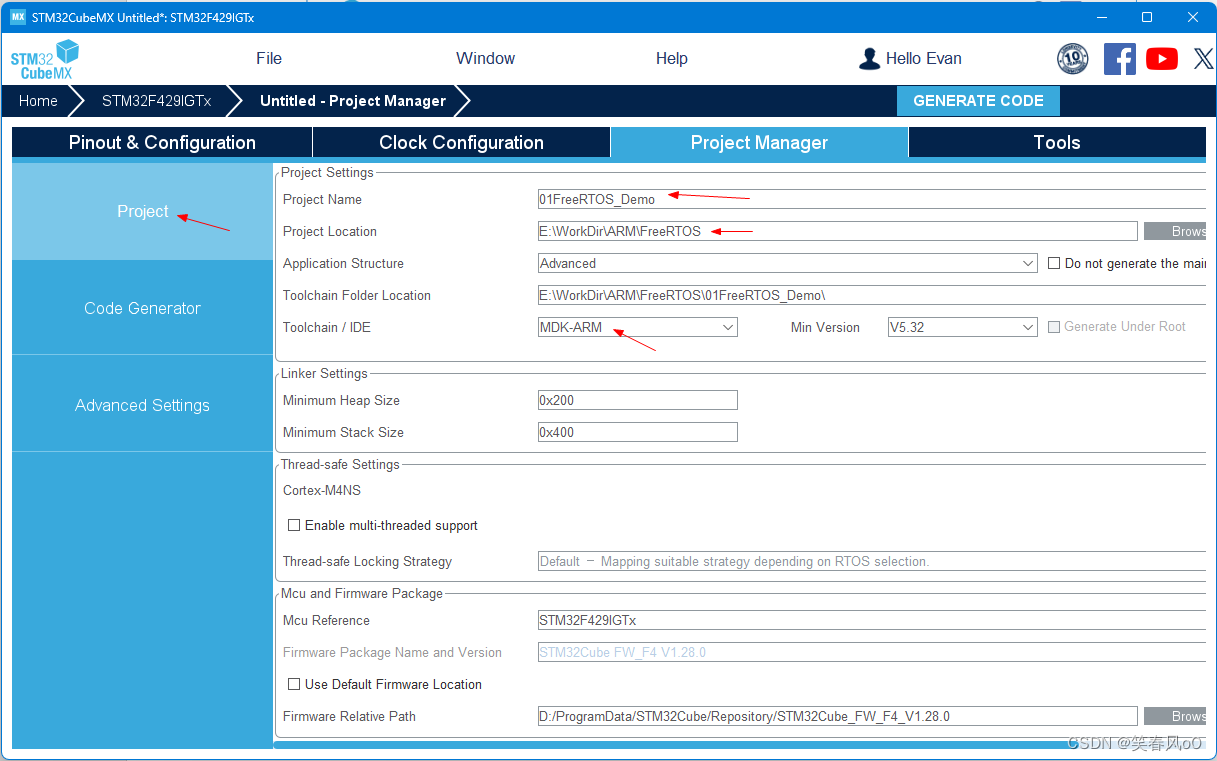
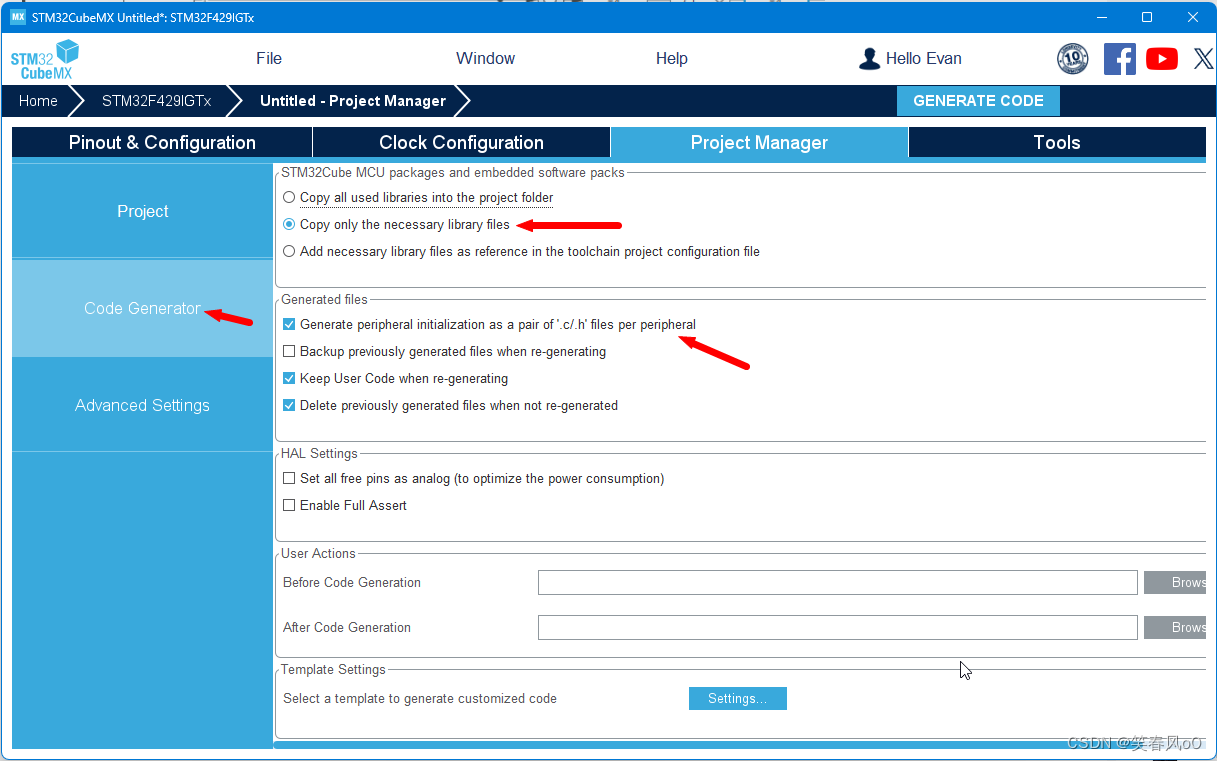
2.9 配置工程输出项
?
?
?
3. 代码编辑
3.1 printf重映射
3.1.1 使用ARMCC 5编译器时的printf重映射方法
printf函数重映射,可以直接使用printf在串口一中打印数据,定位到usart.c文件中。
/* USER CODE BEGIN 0 */
#include "stdio.h"
/* USER CODE END 0 *//* USER CODE BEGIN 1 */
int fputc(int ch,FILE *f)
{
??? HAL_UART_Transmit(&huart1,(uint8_t*)&ch,1,10);
??? return(ch);
}
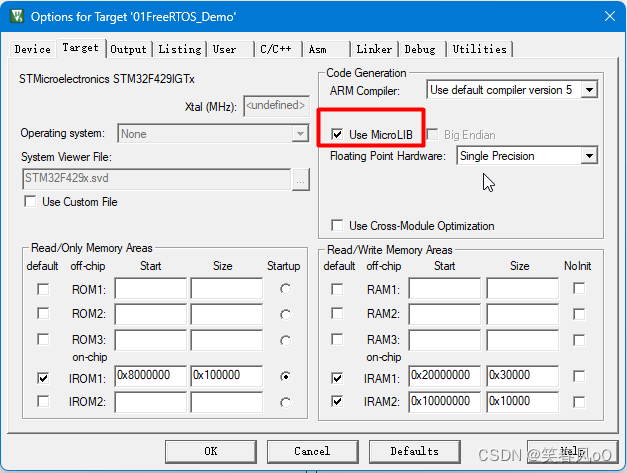
/* USER CODE END 1 */注意:重写printf后运行代码前一定要勾选Use MicroLiB,否则项目烧录后无法执行。
3.1.2 使用ARM 6编译器时的printf重映射方法
参见博文:
或
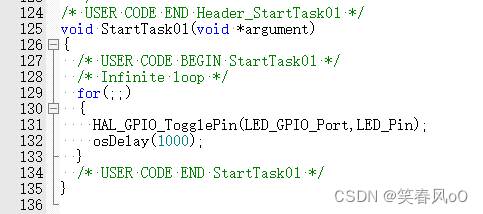
3.2 使用FreeRTOS任务编写代码
在freertos.c中的任务函数里面写相应的程序
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
/* USER CODE END Includes */
/* USER CODE BEGIN Variables */
uint8_t USART1_BUF[] = "Hello FreeRTOS\r\n";
/* USER CODE END Variables */
/* USER CODE BEGIN Header_StartTask01 */
/**
* @brief Function implementing the myTask01 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask01 */
void StartTask01(void *argument)
{
/* USER CODE BEGIN StartTask01 */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
osDelay(1000);
}
/* USER CODE END StartTask01 */
}
/* USER CODE BEGIN Header_StartTask02 */
/**
* @brief Function implementing the myTask02 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask02 */
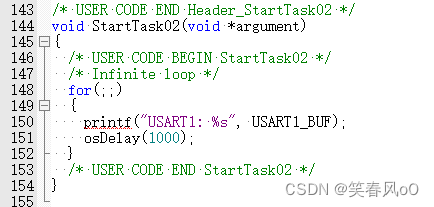
void StartTask02(void *argument)
{
/* USER CODE BEGIN StartTask02 */
/* Infinite loop */
for(;;)
{
printf("USART1: %s", USART1_BUF);
osDelay(1000);
}
/* USER CODE END StartTask02 */
}
?
一点说明:
main.c函数中,osKernelStart()是任务调度函数,通过它可以进入操作系统,注释该语句后,程序就可进入后面的while语句了。
? /* Start scheduler */
? osKernelStart();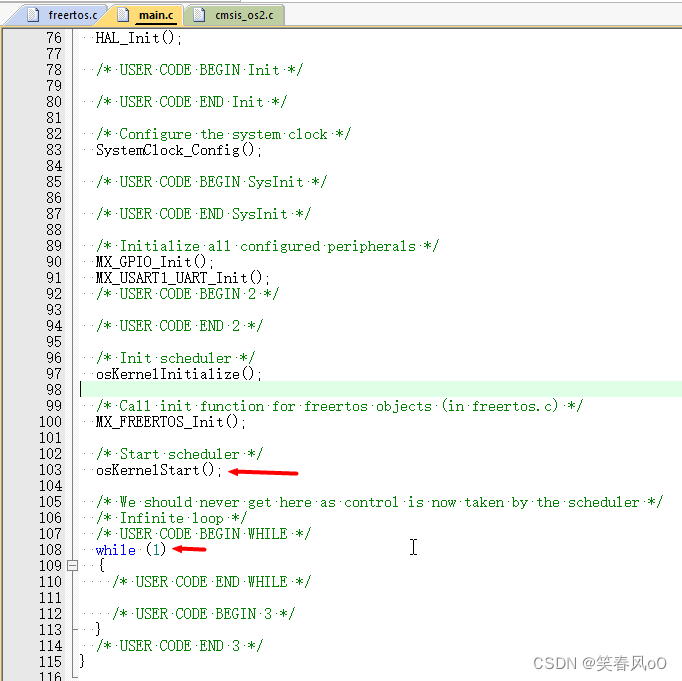
?
3.3? 运行效果
待补充...
?
4 多任务相关知识
4.1 任务基础知识
?
单片机裸机(未使用系统)运行时,一般都是在main函数中用循环来处理所有事件,循环调用相应的函数完成事件的处理。有时候也可以通过中断完成一些处理。相对多任务系统而言,这种就是单任务系统,也称作前后台系统,中断服务函数作为前台程序,大循环while(1)作为后台程序。
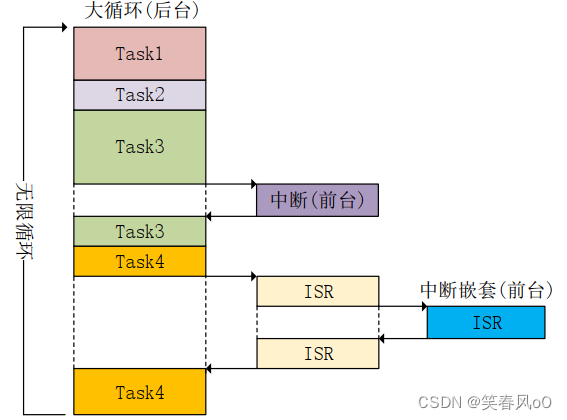
多任务系统会把大问题划成很多的小问题,逐个将小问题解决掉,大问题也就会随之解决。这些小问题是并发处理的,并不是说同一时刻一起执行很多任务,而是由于每个任务执行的时间很短,看起来像同一时刻执行了很多任务。通过FreeRTOS里面的任务调度器完成任务的先后执行。在FreeRTOS中是一个抢占式的实时多任务系统,其任务调度器也是抢占式的。
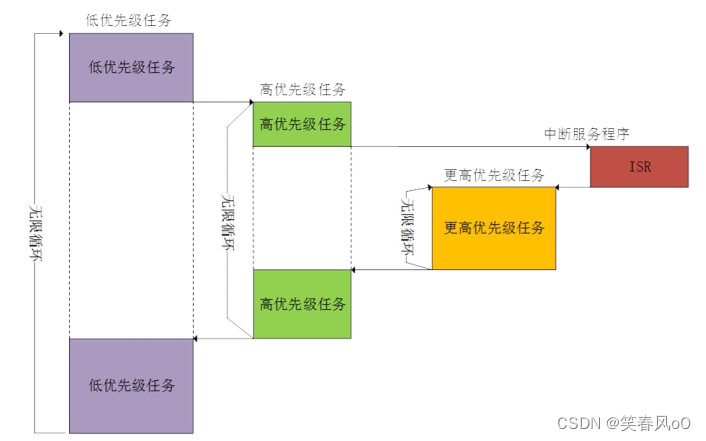
高优先级的任务可以打断低优先级任务的运行而取得CPU的使用权,这样就保证了那些紧急任务的运行。高优先级的任务执行完成以后重新把CPU的使用权归还给低优先级的任务,这个就是抢占式多任务系统的基本原理。
4.2 任务状态
FreeRTOS中的任务永远只有运行态、就绪态、阻塞态、挂起态。任务状态图切换如下:
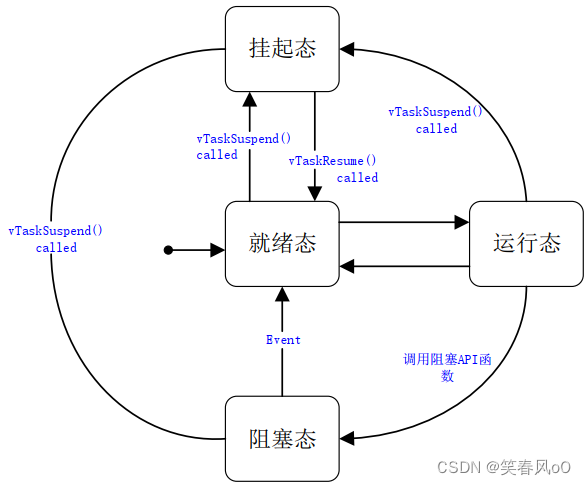
(1)运行态
当一个任务正在运行时,那么就说这个任务处于运行态,处于运行态的任务就是当前正在使用处理器的任务。如果使用的是单核处理器的话那么不管在任何时刻永远都只有一个任务处于运行态。
(2)就绪态
处于就绪态的任务是那些已经准备就绪(这些任务没有被阻塞或者挂起),可以运行的任务,但是处于就绪态的任务还没有运行,因为有一个同优先级或者更高优先级的任务正在运行!
(3)阻塞态
如果一个任务当前正在等待某个外部事件的话就说它处于阻塞态,比如说如果某个任务调用了函数vTaskDelay0的话就会进入阻塞态,直到延时周期完成。任务在等待队列、信号量、事件组、通知或互斥信号量的时候也会进入阻塞态。任务进入阻塞态会有一个超时时间,当超过这个超时时间任务就会退出阻塞态,即使所等待的事件还没有来临!
(4)挂起态
像阻塞态一样,任务进入挂起态以后也不能被调度器调用进入运行态,但是进入挂起态的任务没有超时时间。任务进入和退出挂起态通过调用函数vTaskSuspend()和xTaskResume()。
4.3 任务优先级
每个任务都可以分配一个从0~(configMAX_PRIORITIES-1)的优先级,configMAX_PRIORITIES在文件FreeRTOSConfig.h中有定义。如果所使用的硬件平台支持类似计算前导零这样的指令(可以通过该指令选择下一个要运行的任务,Cortex-M处理器是支持该指令的),并且宏configUSE_PORT_OPTIMISED_TASK_SELECTION也设置为了1,那么宏configMAX_PRIORITIES不能超过32!也就是优先级不能超过32级。其他情况下宏configMAX_PRIORITIES可以为任意值,但是考虑到RAM的消耗,宏configMAX_PRIORITIES最好设置为一个满足应用的最小值。优先级数字越低表示任务优先级越低,0的优先级最低,configMAX_PRIORITIES-1的优先级最高。空闲任务的优先级最低,为0。FreeRTOS调度器确保处于就绪态或运行态的高优先级的任务获取处理器使用权,换句话说就是处于就绪态的最高优先级的任务才会运行。当宏configUSE_TIME_SLICING定义为1的时候多个任务可以共用一个优先级,数量不限。默认情况下宏configUSE_TIME_SLICING在文件FreeRTOS.h中已经定义为1。此时处于就绪态的优先级相同的任务就会使用时间片轮转调度器获取运行时间。
4.4 任务实现
在使用FreeRTOS的过程中,需要使用xTaskCreat()或者xTaskCreatStatic()来创建任务,这两个函数的第一个参数为pxTaskCode,就是任务函数本体。任务函数就是完成本任务工作的函数。FreeRTOS官方给出的任务函数模板为:
void vATaskFunction(void *pvParameters){????????(1)
??? for(;;){??????????????????????????????????? (2)
?????? --任务应用程序--???????????????????? ?????(3)
?????? vTaskDelay();?????????????????????????? (4)
}
??? VTaskDelete(NULL);????????????????????????? (5)
}(1)、任务函数本质也是函数,所以肯定有任务名什么的,不过这里要注意:任务函数的返回类型一定要为void类型,也就是无返回值,而且任务的参数也是void指针类型的!任务函数名可以根据实际情况定义。
(2)、任务的具体执行过程是一个大循环,for(;;)就代表一个循环,作用和while(1)一样,笔者习惯用while(1)。
(3)、循环里面就是真正的任务代码了,此任务具体要干的活就在这里实现!
(4)、FreeRTOS的延时函数,此处不一定要用延时函数,其他只要能让FreeRTOS发生任务切换的API函数都可以,比如请求信号量、队列等,甚至直接调用任务调度器。只不过最常用的就是FreeRTOS的延时函数。
(5)、任务函数一般不允许跳出循环,如果一定要跳出循环的话在跳出循环以后一定要调用函数vTaskDelete(NULL)删除此任务!FreeRTOS的任务函数和UCOS的任务函数模式基本相同的,不止FreeRTOS,其他RTOS的任务函数基本也是这种方式的。
?
?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 如何使用Lychee结合内网穿透搭建本地私人图床网站并实现远程访问
- flutter 使用canvas实现一个梯形
- Appium 环境配置
- 68. redis计数与限流中incr+expire的坑以及解决办法(Lua+TTL)
- 07_CMDB系统开发一
- 基于SpringBoot + Vue的图书管理系统
- 基于MacBook Pro M1芯片运行chatglm2-6b大模型
- Angular系列教程之生命周期钩子
- MYSQL的20条军规
- 产品经理考PMP还是NPDP?答案揭晓!