trucksim与simulink联合仿真基于pid控制算法实现车道保持
发布时间:2024年01月17日
一、pid算法原理不做过多解释自行百度,这里采用的是位置式pid。
效果视频:https://www.bilibili.com/video/BV1CN4y1p7gb/?vd_source=a1425ad8eaf3586e891a6d0040eb89cc
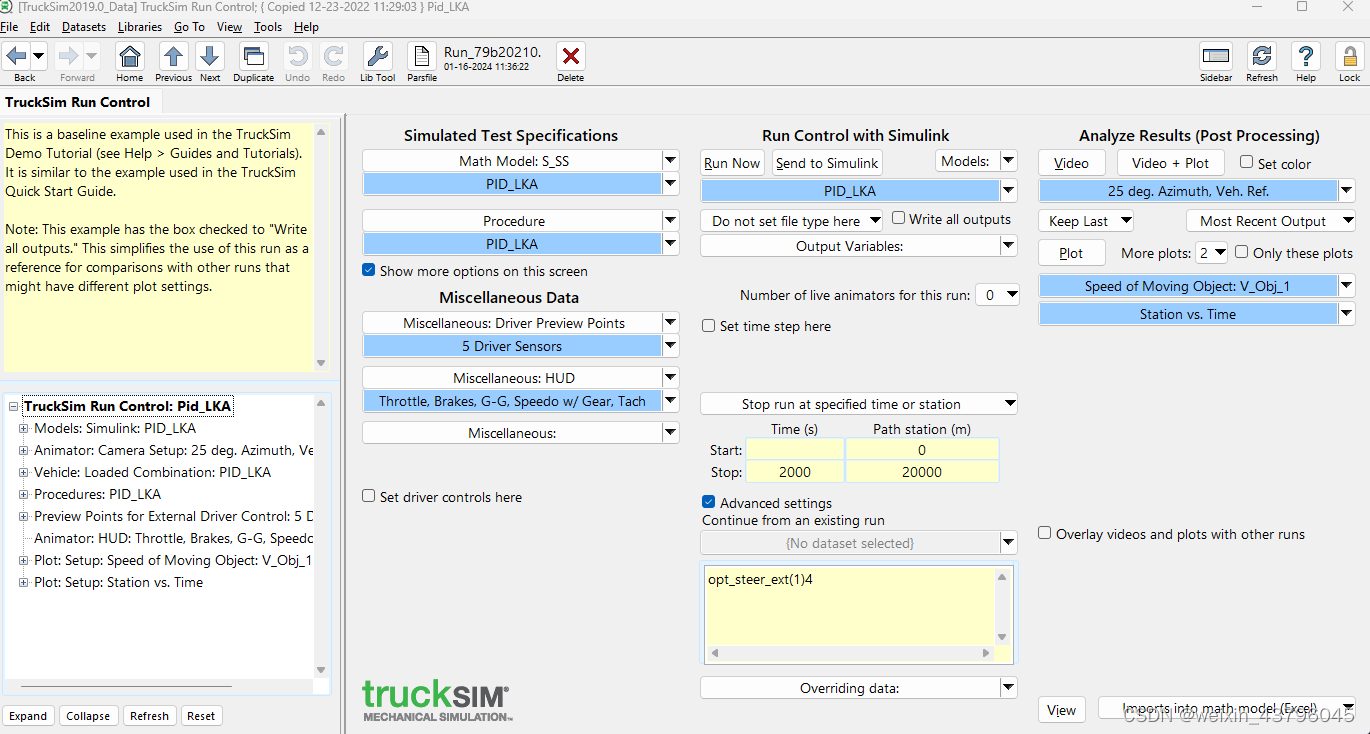
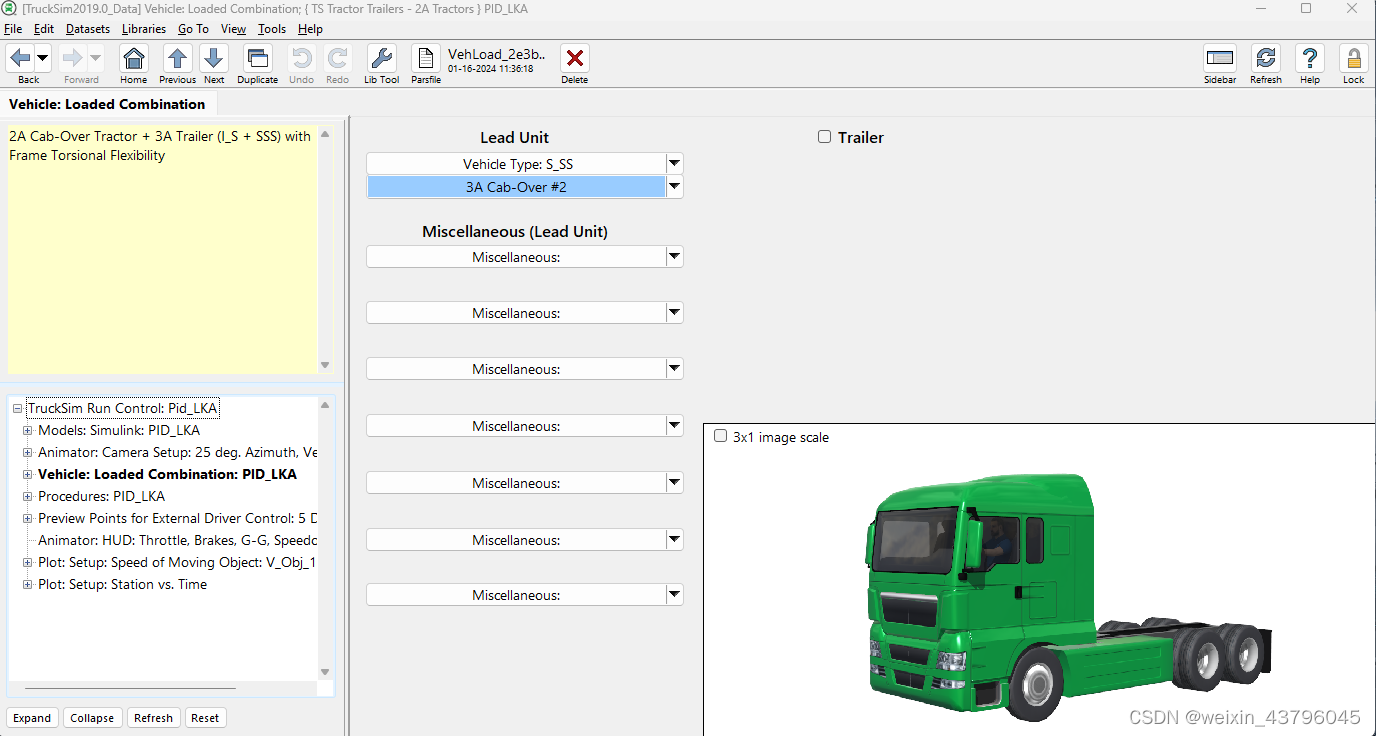
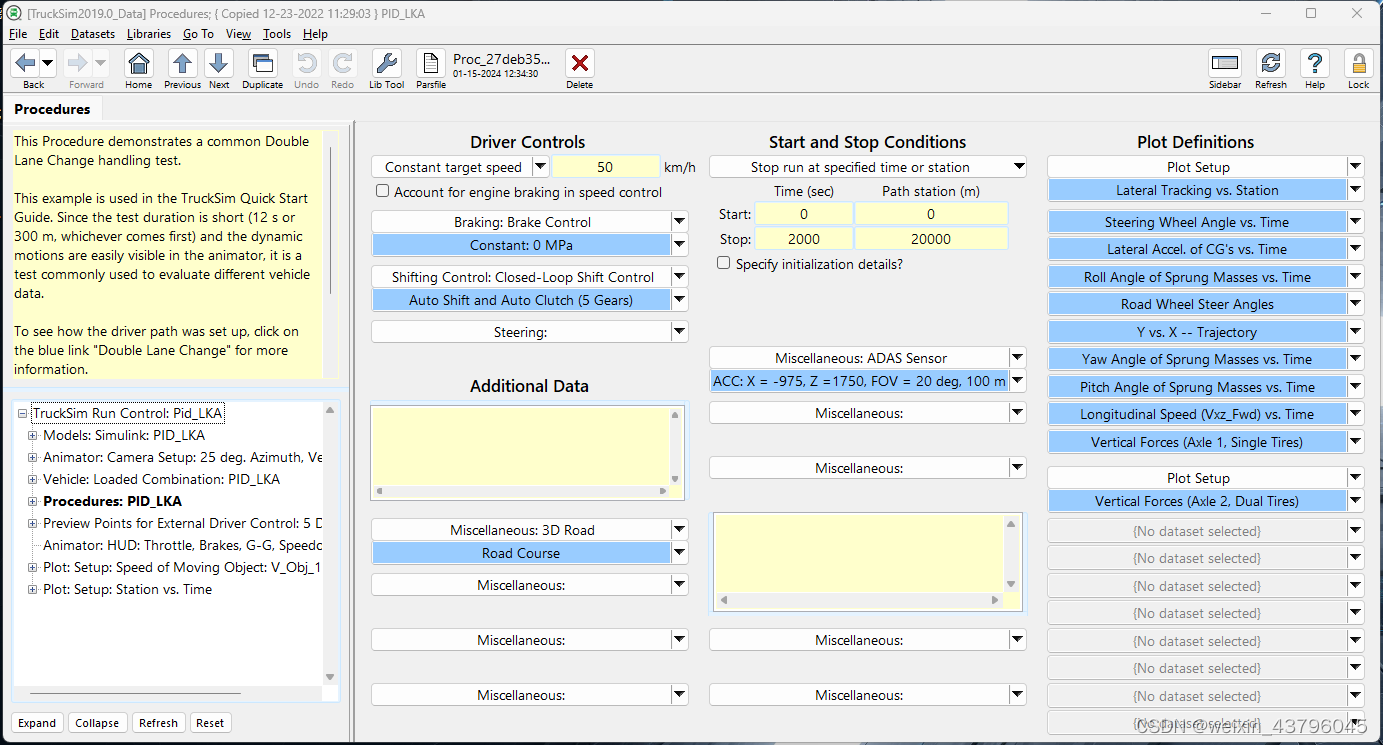
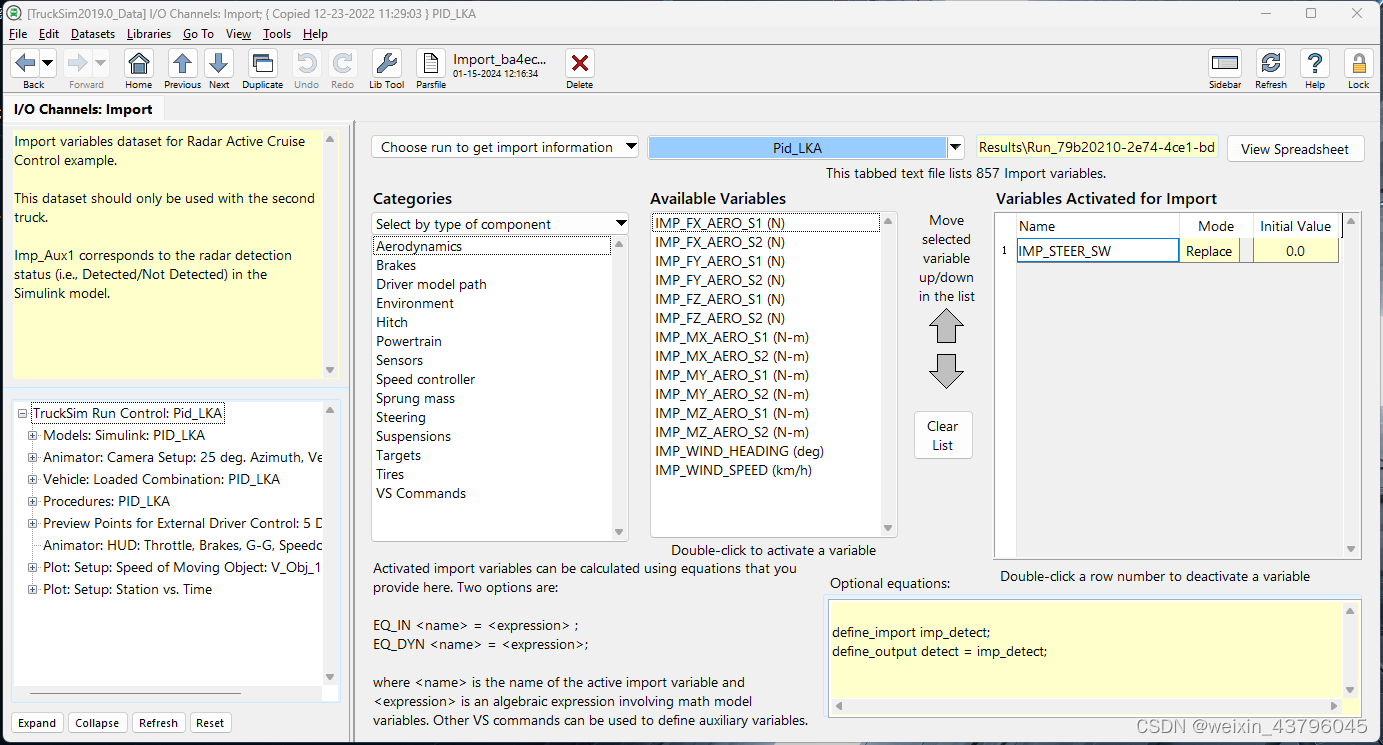
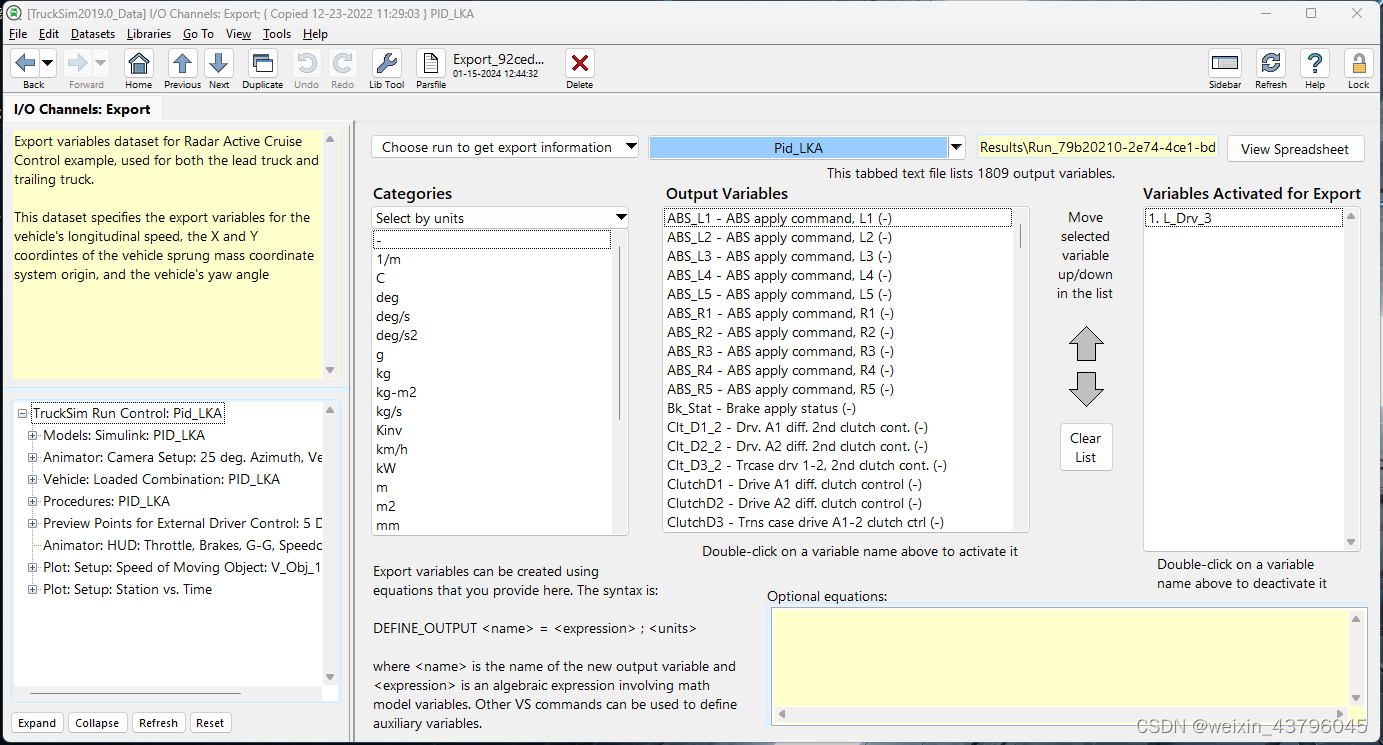
二、trucksim界面操作截图
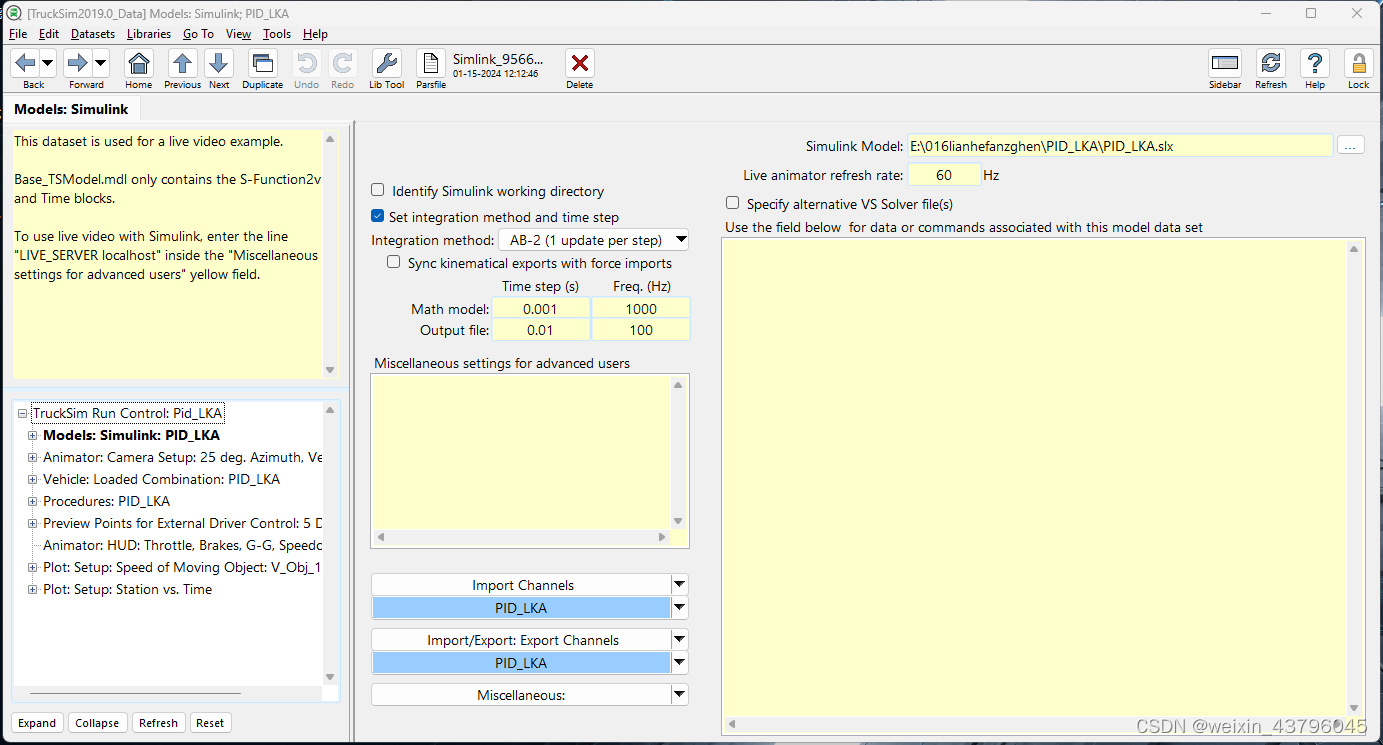
三、simulink模型截图
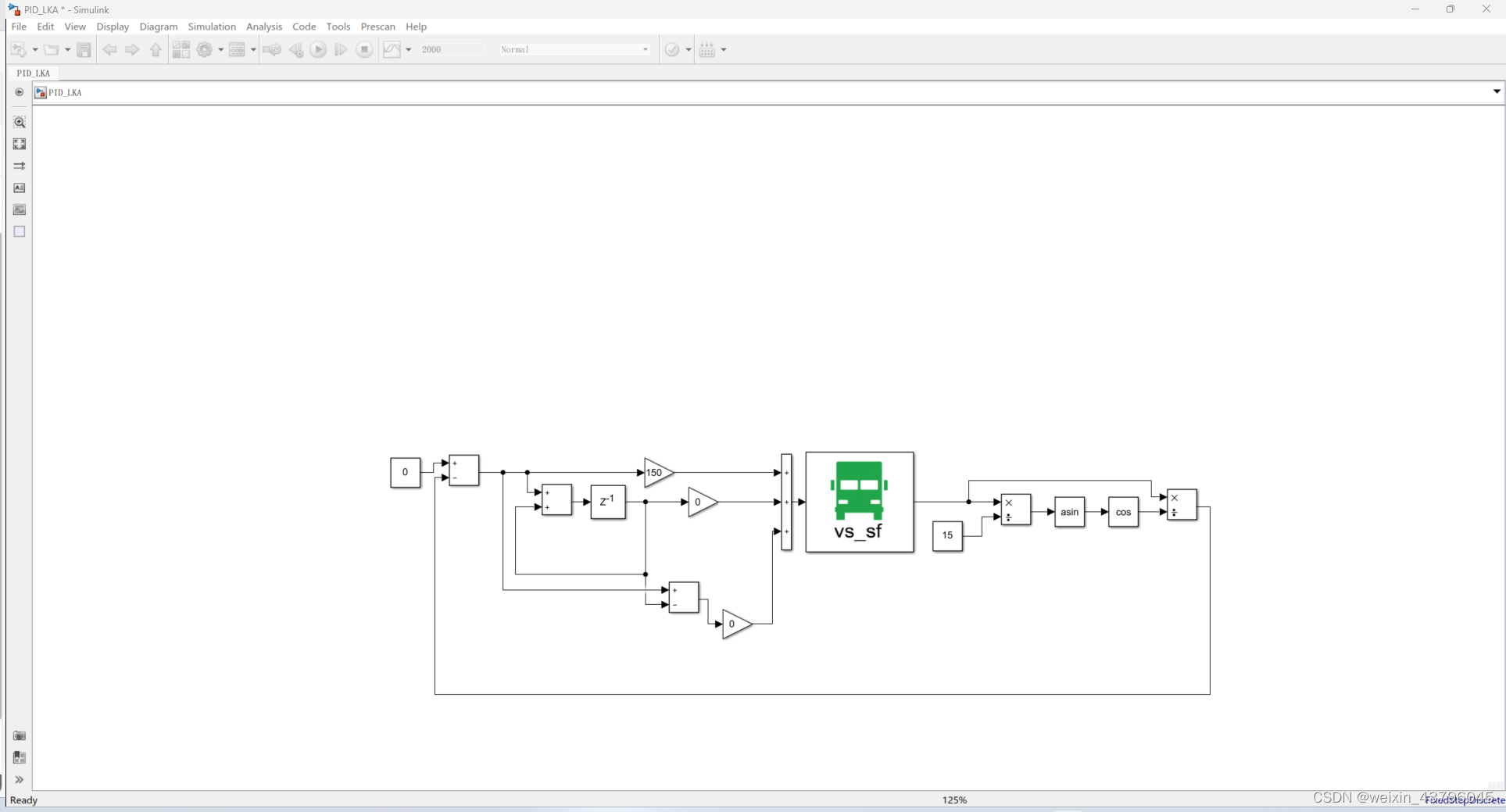
采用的P ; I和D目前都没用上
四、原理从trucksim输出的是L1 转化成L2 L2与方向盘转角成比例关系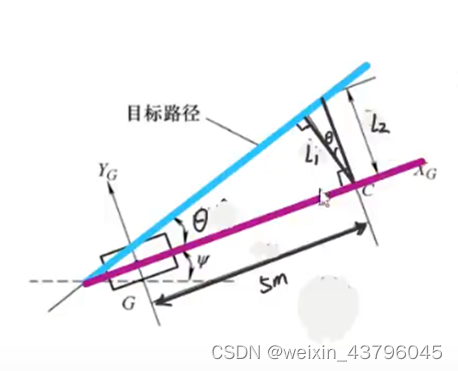
五、好像不用这么麻烦 实际上  与方向盘转角就是线性关系,由此:
与方向盘转角就是线性关系,由此:

asin是弧度 × 180/pi就转化成角度,方向盘转角与车轮转角线性关系是25
效果也可以
文章来源:https://blog.csdn.net/weixin_43796045/article/details/135641751
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 几种常见的UML图(类图 对象图 活动图 状态图)
- uniapp自定义头部导航怎么实现?
- canvas绘制不同样式的五角星(图文示例)
- 【数模百科】一篇文章讲清楚灰色预测模型GM(1,1)附python代码
- 【Vue】Vue3 pc 端配置 rem 响应式
- 鸿蒙 HarmonyOS ArkTS 弹窗、带点击回调
- DINO:DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection
- NodeJs第十三章 cookie
- 干货!Linux常见操作指令!
- Shell编程从入门到实战