自动驾驶学习笔记(二十一)——自动泊车系统
发布时间:2023年12月24日
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《Apollo开放平台9.0专项技术公开课》免费报名—>传送门
文章目录
前言
??????? 见《自动驾驶学习笔记(十六)——目标跟踪》
??????? 见《自动驾驶学习笔记(十七)——视觉感知》
????????见《自动驾驶学习笔记(十八)——Lidar感知》
????????见《自动驾驶学习笔记(十九)——Planning模块》
????????见《自动驾驶学习笔记(二十)——Planning算法》
泊车任务
????????自动泊车要处理的任务类型,包括平行车位、垂直车位,有车位线parking slot、无车位线parking space,不同划线类型、不同划线颜色、不同划线质量、不同天气、不同距离、不同停车点等环境条件,示例如下:

泊车过程
????????自动泊车的流程包括:激活泊车功能、寻找和选择车位、规划轨迹点、驱动控制、发现动态障碍物停车、继续泊车并持续检测障碍物等,示例如下:

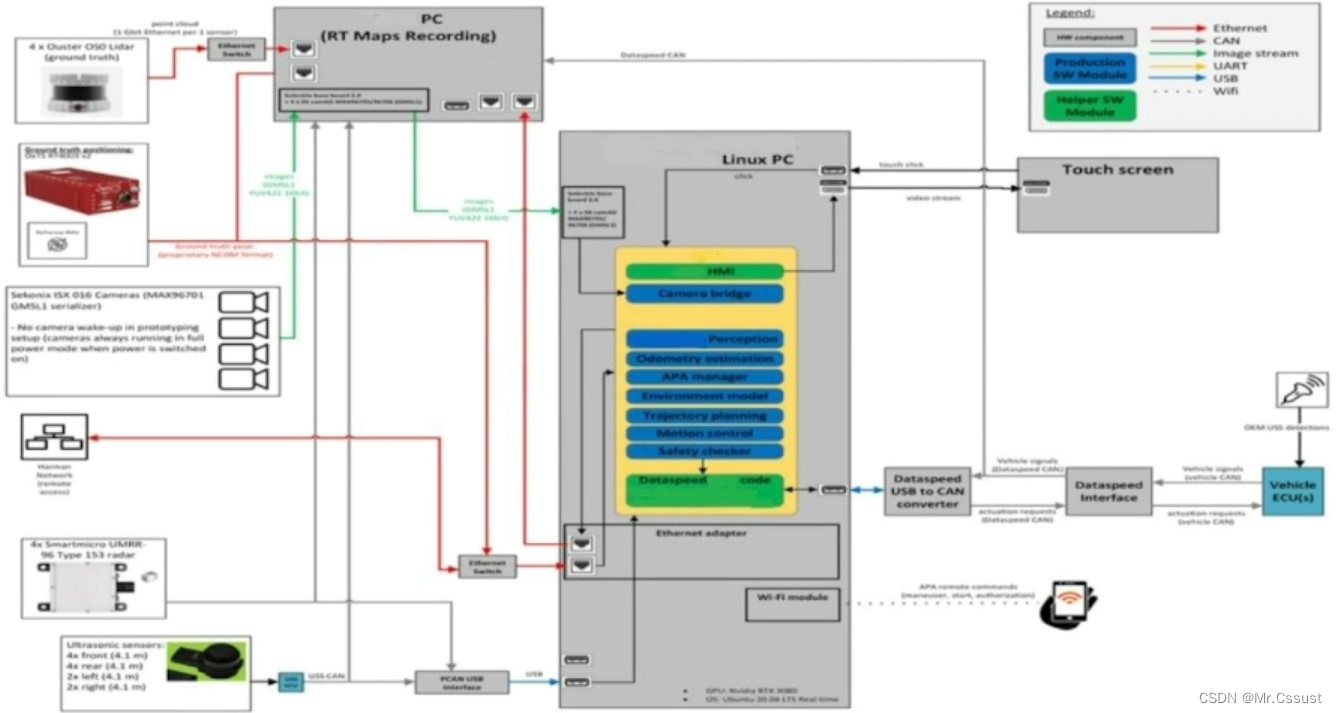
硬件基础
????????自动泊车系统的硬件基础,示例如下:
总结
????????以上就是本人在学习自动驾驶时,对所学课程的一些梳理和总结。后续还会分享另更多自动驾驶相关知识,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
????????另外,如果有同在小伙伴,也正在学习或打算学习自动驾驶时,可以和我一同抱团学习,交流技术。
????????版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
????????文中部分图片来源自网络,若有侵权,联系立删。
文章来源:https://blog.csdn.net/CSSUST/article/details/135182473
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 多线程多进程的使用场景和常见问题处理
- docker部署wiki.js
- 硅的选择性蚀刻
- Axure元件库的介绍以及个人简介和登录界面案例展示
- 案例076:基于微信小程序的亿家旺生鲜云订单零售系统的设计与实现
- Spring框架中的五种常用设计模式
- 怿星科技测试实验室获CNAS实验室认可,汽车以太网检测能力达国际标准
- Edge无法卸载也无法上网的处理
- 企业级实战项目:基于 pycaret 自动化预测公司是否破产
- 【IEEE独立出版 | 往届均完成检索】2024年第四届消费电子与计算机工程国际学术会议(ICCECE 2024)