OSG 关于MVPW变换
在osg中观察矩阵接口设置如下:?其中eye是相机的世界坐标位置,center是相机观察的位置,up是相机向上向量。?在计算机的三维世界中,相机如同我们的眼睛,捕捉眼前的每一副画面,反过来物体要能够被相机在指定的距离和角度下观看到,并通过屏幕像素绘制出来。
在这个过程中,物体的三维空间坐标需要经过好几层矩阵变换,最终转换到二维平面坐标,并通过像素呈现在屏幕中。我们将这几层矩阵变换过程简称为MVPW矩阵变换。
1、模型?Model
MVPW中的M是模型顶点在三维场景中的位置。
一般情况下,模型在绘制过程中都是使用模型自身坐标(通常称为模型坐标或者小坐标),模型的顶点位置称为pos,通过变换矩阵?matrix改变模型位置、姿态、大小,将模型放置在指定的三维场景中。这时候模型顶点在三维场景中的坐标位置worldPos?=?pos?*?matrix。
2、观察矩阵?ViewMatrix
MVPW中的V是观察矩阵,作用是将世界坐标转为为相机坐标。在相机坐标系下,以相机作为参考,其位置为原点,world*?viewMatrix可获得模型顶点在相机坐标下的位置。
- 在osg中观察矩阵接口设置如下:

其中eye是相机的世界坐标位置,center是相机观察的位置,up是相机向上向量。
 ????我们可以通过建立坐标轴来说明,在相机坐标系下,eye与center的方向构建出的向量为前向量F,即Y轴;F向量与up进行叉乘后得到右向量R,即X轴;R向量与F向量叉乘后的得到up向量U,即Z轴。此时相机坐标系的XYZ轴就建立完成了。
????我们可以通过建立坐标轴来说明,在相机坐标系下,eye与center的方向构建出的向量为前向量F,即Y轴;F向量与up进行叉乘后得到右向量R,即X轴;R向量与F向量叉乘后的得到up向量U,即Z轴。此时相机坐标系的XYZ轴就建立完成了。
 图1:相机坐标轴
图1:相机坐标轴
- osg中viewMatrix视口矩阵的计算:

- 根据viewMatrix的逆矩阵获取相机坐标轴、相机位置:
 图2:视口逆矩阵结构
图2:视口逆矩阵结构
 ????在FreeXEarth中第一人称操作器、第三人称操作器、地球操作器都是通过对视口矩阵平移、旋转等操作实现的。
????在FreeXEarth中第一人称操作器、第三人称操作器、地球操作器都是通过对视口矩阵平移、旋转等操作实现的。
- 投影矩阵?ProjectMatrix
MVPW中的P是投影矩阵(projectMatrix),?在计算机三维图像中,投影的作用是将三维坐标信息转化到二维坐标中。投影有两种:透视投影和正交投影。
- 正交投影可以让视口中物体之间的距离在投影变化前后都保持不变,也可以按照实体原始比例绘制到屏幕中。
 图3:正交投影视景体(长方体)
图3:正交投影视景体(长方体)
????例如,两条平行线投影变换后仍然保持平行,不会出现远处的物体变小近处的较大。
- 在osg中设置正交投影的接口如下:
 ????left表示视景体左面的坐标,right表示右面的坐标,bottom表示下面的,top表示上面的。
????left表示视景体左面的坐标,right表示右面的坐标,bottom表示下面的,top表示上面的。
????透视投影是在相机坐标下裁剪一块四棱锥区域,通过视口变换到一个(-1,1)的正方体中,最终将正方体信息投影到四棱锥的前面上。通过透视投影变换后的实体呈现出近处大远处小效果。透视投影跟人的眼睛或相机镜头观察到的效果是一致的。
 图4:透视投影视景体(四棱锥)
图4:透视投影视景体(四棱锥)
- 在osg中设置透视投影的接口如下:
 ????fovy——相机的角度大小,视角小就是焦距大(长焦),视角大就是焦距小(广角);
????fovy——相机的角度大小,视角小就是焦距大(长焦),视角大就是焦距小(广角);
?aspect——实际窗口的纵横比,即width(窗口宽度)/?height(窗口高度);
zNear——近处裁面,如果物体的位置到相机距离小于近裁剪面,该物体会被相机裁剪掉;
zFar——远处的裁面,如果物体的位置到相机距离大于远裁剪面,该物体会被相机裁剪掉。
 图5:fovy,?aspectRatio,?zNear关系图
图5:fovy,?aspectRatio,?zNear关系图
- 根据三角函数,通过fovy,?aspectRatio,zNear,?zFar可以计算出left、right、top、bottom:

- 最终根据left、right、top、bottom、zNear,?zFar计算投影矩阵:

4、窗口矩阵变化
其中当三维坐标经过了MVP转换后,还需要经过窗口变换,才能显示在屏幕中。
窗口矩阵变换主要作用是将视口裁剪后的结果映射到屏幕中,通过viewport获取屏幕显示区域的大小,将帧缓冲区域内的数据转变为能显示在屏幕上的像素。
- 在osg/opengl矩阵变换工作流程一般如下图:
 图6:矩阵变换工作流程
图6:矩阵变换工作流程
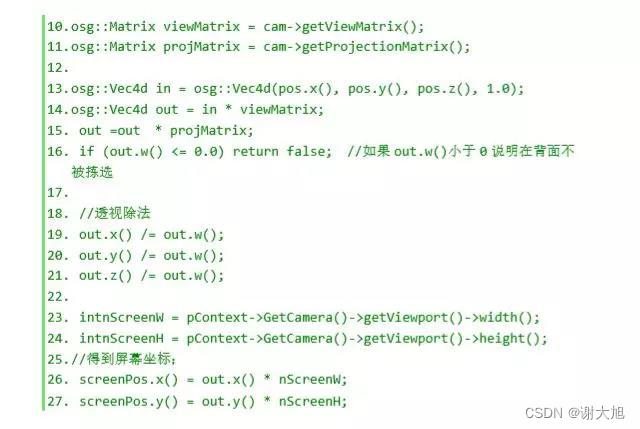
????当数据进行MVP矩阵转换后,得到裁剪坐标,在经过坐标除以w之后(称为透视除法),会得到标准化设备坐标(NDC),标准化设备坐标是一个x、y和z值在-1.0到1.0的一小段空间。
????任何落在范围外的坐标都会被丢弃/裁剪,不会显示在你的屏幕上,最终将x、y分别于viewport中显示的宽度、高度相乘,得到最终的屏幕坐标。整个过程也是世界坐标转换为屏幕坐标的过程!
 图7:标准化设备坐标
图7:标准化设备坐标
- osg中将世界坐标的转换为屏幕坐标,具体代码如下:
5、总结
最后,让我们一起回顾MVPW的整个过程:
M用来模型位置变换,调整模型位置,变换后的物体坐标是全局坐标,也成为世界坐标;
V是相机的视口变换,用来构建相机视口坐标系,将物体全局坐标转换为相机坐标中;一般我们将模型变换与视口变换统称为模型视口变换,即modelView;?
P是投影变换,构建一个裁剪的视景体,或长方体或四棱锥,对场景进行裁剪;
W是窗口变换,作用是将帧缓冲区域内的数据转变为能显示在屏幕上的像素。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Ubuntu代理快捷转换
- 神经网络:优化器和全连接层
- [计算机提升] 通过任务管理器管理任务
- Deep Learning(wu--108-118)CNN详解(一)
- STM32使用中断方式进行USART数据收发以及printf函数的重写
- 静图如何做成动态gif图?手把手教你一招制作
- synchronized原理
- C# Cad2016二次开发选择文本信息导出(六)
- web前端javaScript笔记——(4)方法
- EDI能够为企业间信息传输带来哪些帮助?