transformer详解
transformer
框架
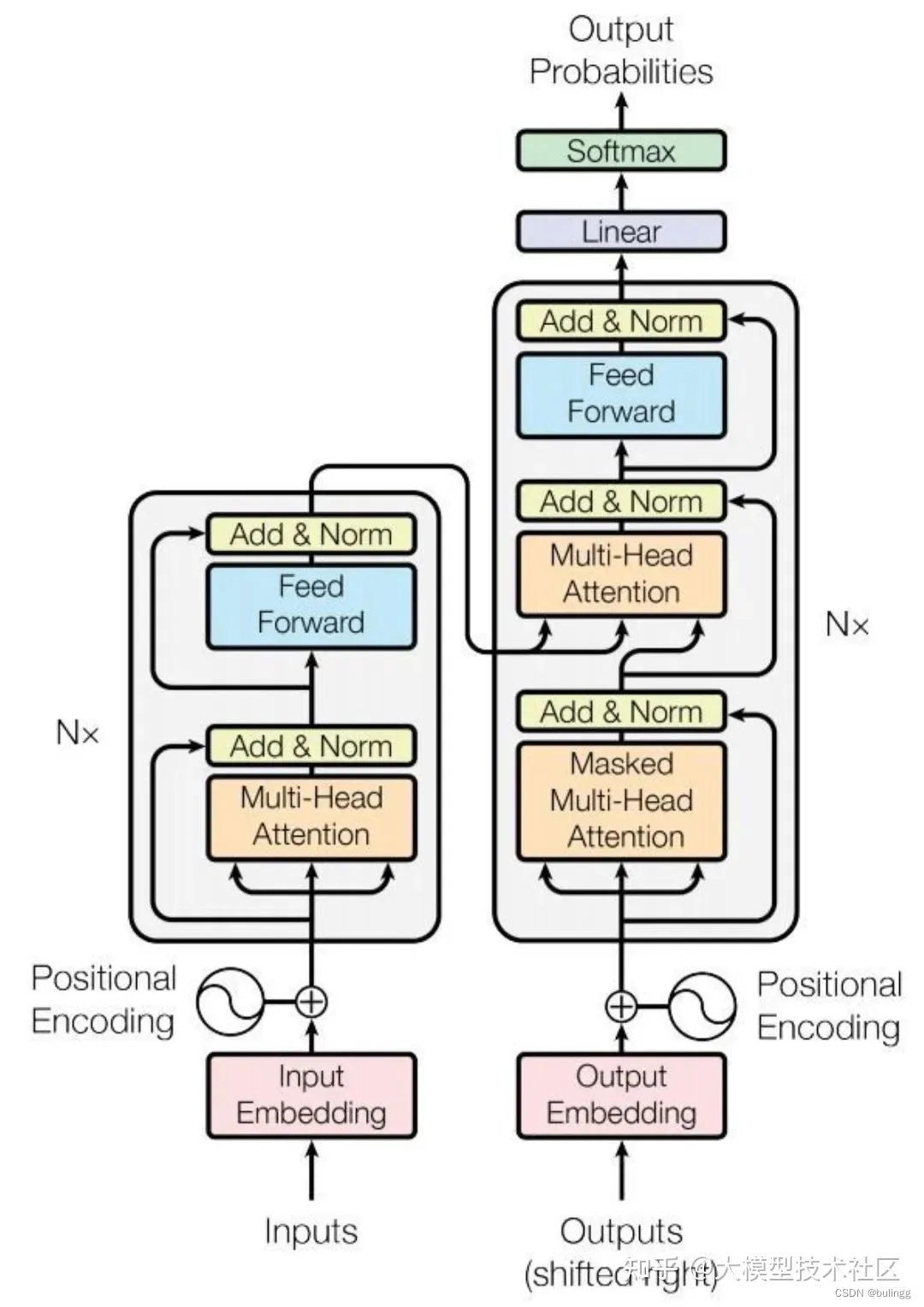
框架解析:
注意力机制
三要素:查询(query),键(key),值(value)
通过query序列检索key,获取合适的value信息
注意力评分函数(scoring function)
假设有一个查询
q
∈
R
q
q \in \mathcal{R}^{q}
q∈Rq和
m
m
m个键值对
(
k
1
,
v
1
)
,
?
?
,
(
k
m
,
v
m
)
(k_{1},v_{1}),\cdots,(k_{m},v_{m})
(k1?,v1?),?,(km?,vm?),
k
∈
R
k
,
v
∈
R
v
k \in \mathcal{R}^{k},v\in \mathcal{R}^{ v}
k∈Rk,v∈Rv
注意力函数可表示为加权和的形式:
f
(
q
,
(
k
1
,
v
1
)
,
?
?
,
(
k
m
,
v
m
)
)
=
∑
i
=
1
m
α
(
q
,
k
i
)
v
i
∈
R
v
f(q,(k_{1},v_{1}),\cdots,(k_{m},v_{m}))=\sum_{i=1}^{m}\alpha(q,k_{i})v_{i}\in \mathcal{R}^{v}
f(q,(k1?,v1?),?,(km?,vm?))=i=1∑m?α(q,ki?)vi?∈Rv
其中
α
(
q
,
k
i
)
\alpha(q,k_{i})
α(q,ki?)是由注意力评分函数
a
a
a通过
s
o
f
t
m
a
x
softmax
softmax函数归一化得到
$
α
(
q
,
k
i
)
=
s
o
f
t
m
a
x
(
a
(
q
.
k
i
)
)
=
e
x
p
(
a
(
q
,
k
i
)
)
∑
j
m
e
x
p
(
a
(
q
,
k
j
)
)
\alpha(q,k_{i})=softmax(a(q.k_{i}))=\frac{exp(a(q,k_{i}))}{\sum_{j}^{m}exp(a(q,k_{j}))}
α(q,ki?)=softmax(a(q.ki?))=∑jm?exp(a(q,kj?))exp(a(q,ki?))?
a
a
a有以下几种形式:
- 加性注意力(Additive Attention):(当query,key为不同长度的矢量时)
a ( q , k i ) = W v T t a n h ( W q q + W k k ) ∈ R a(q,k_{i})=W_{v}^{T}tanh(W_{q}q+W_{k}k)\in \mathcal{R} a(q,ki?)=WvT?tanh(Wq?q+Wk?k)∈R
其中, W q ∈ R h × q , W k ∈ R h × k , W v ∈ R h × 1 W_{q}\in \mathcal{R}^{h\times q}, W_{k}\in \mathcal{R}^{h\times k},W_{v}\in \mathcal{R}^{h\times 1} Wq?∈Rh×q,Wk?∈Rh×k,Wv?∈Rh×1
即,将查询和键连结起来后输入到一个多层感知机(MLP)中, 感知机包含一个隐藏层,其隐藏单元数 h h h是一个超参数, t a n h tanh tanh作为激活函数,并禁用偏置项(即使添加了偏置项,即 t a n h ( X + b ) tanh(X+b) tanh(X+b),在经过 s o f t m a x softmax softmax归一化时会被消除,仍然无效) - 点积注意力(Dot Product Attention ):(要求query和key长度相同)
a ( q , k i ) = q T k i a(q,k_{i})=q^{T}k_{i} a(q,ki?)=qTki? - 缩放点积注意力(Scaled Dot-Product Attention):
q
,
k
i
∈
R
d
k
q,k_{i}\in R^{d_{k}}
q,ki?∈Rdk?,并假设其中的元素均为0均值,1方差
a ( q , k i ) = q T k / d a(q,k_{i})=q^{T}k/\sqrt{d} a(q,ki?)=qTk/d?
当query和key的维度 d k d_{k} dk?较小时,点积注意力和加性注意力表现效果相似,但是当 d k d_{k} dk?较大时,方差也会变大( D ( q ? k ) = d k D(q\cdot k)=d_{k} D(q?k)=dk?),分布趋于陡峭,当点积的数据量级较大时,经过 s o f t m a x softmax softmax后,梯度会很小,容易导致梯度消失,不利于计算,需要进行一定的缩放,将其方差控制为1。
证明可见:self-attention中的dot_product为什么要被缩放
除以 d k d_{k} dk?的原因
- 防止输入softmax的值过大,导致偏导数趋近于0,避免梯度消失
- 使得 q ? k q\cdot k q?k的值满足期望为0,方差为1的分布
当实际应用一个批量数据进行运算时,基于
n
n
n个查询和
m
m
m个键-值对计算注意力,其中查询,键长度为
d
d
d,值长度为
v
v
v,则
Q
∈
R
n
×
d
,
K
∈
R
m
×
d
,
V
∈
R
m
×
v
Q\in \mathcal{R}^{n\times d},K\in \mathcal{R}^{m\times d},V\in \mathcal{R}^{m\times v}
Q∈Rn×d,K∈Rm×d,V∈Rm×v的缩放点击注意力为:
s
o
f
t
m
a
x
(
Q
K
T
d
)
V
?
∈
?
R
n
×
v
softmax(\frac{QK^{T}}{\sqrt{d}})V\ \in\ \mathcal{R}^{n\times v}
softmax(d?QKT?)V?∈?Rn×v
区别:Dot Product Attention 和 Additive Attention两者在复杂度上是相似的。但是Additive Attention增加了三个可学习的矩阵,所以相比另外两个效果会更好,同时也增加了更多的模型参数,计算效率会较低。
自注意力机制(self-attention)
查询、键、值均由同一个输入经过不同的“线性投影”变化得到,并采用缩放点积注意力得到最终输出
A t t e n t i o n ( Q , K , V ) = s o f t m a x ( Q K T d ) V ? ∈ ? R n × v Attention(Q,K,V)=softmax(\frac{QK^{T}}{\sqrt{d}})V\ \in\ \mathcal{R}^{n\times v} Attention(Q,K,V)=softmax(d?QKT?)V?∈?Rn×v
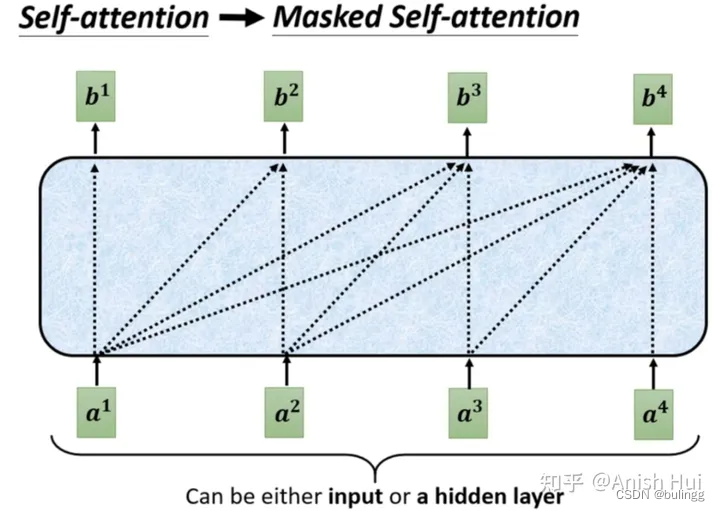
masked self-attention
作用:防止Transformer在训练时泄露后面的它不应该看到的信息,确保仅看到当前及以前得信息
更多可见:MultiHead-Attention和Masked-Attention的机制和原理
多头注意力(multi-head attention)
原理:在给定相同的查询、键、值时,使用**h个独立的"线性投影"**来变换q,k,v,然后并行得使用h个注意力机制,学习到不同的行为,然后将h个自注意力的输出拼接在一起,通过另一个可学习的线性投影进行变换,产生最终的输出,来捕捉序列内各种范围内的依赖关系(例如短距离依赖和长距离依赖)
其中,每个自注意力被称为一个头
- 作用:将模型分为多个头,期望形成多个相互独立的子空间,可以让模型关注不同的信息
import torch
from torch import nn
##### 使多个头可以进行并行计算,p_q = p_k = p_v = p_o/h,p_o=num_hiddens,
# 直接用nn.Linear(query_size,num_hiddens),num_hiddens=p_v*h,即多个线性变换结合在一起
# 假设输出维度为num_hiddens,同时h*p_v = num_hiddens
def transpose_qkv(X, num_heads): # 将组合起来的输入,变换为num_heads个输入
# 输入X的shape为(batch_size,查询或者“键值对”的个数,num_hiddens)
# 输出X的shape为(batch_size,查询或者“键值对”的个数,num_heads,num_hiddens/num_heads)
X = X.reshape(X.shape[0],X.shape[1], num_heads,-1)
# 输出X的形状:(batch_size,num_heads,查询或者“键-值”对的个数,
# num_hiddens/num_heads)
X = X.permute(0,2,1,3)
# 最终输出的形状:(batch_size*num_heads,查询或者“键-值”对的个数,
# num_hiddens/num_heads)
return X.reshape(-1,X.shape[2],X.shape[3])
def transpose_output(X,num_heads): # 将组合起来的输出,变换为num_heads个输出
"""逆转transpose_qkv函数的操作"""
X = X.reshape(-1,num_heads,X.shape[1].X.shape[2])
X = X.permute(0,2,1,3)
return X.reshape(X.shape[0], X.shape[1],-1)
class MultiHeadAttention(nn.Module):
def __init__(self,key_size,query_size,value_size,num_hiddens,num_heads,dropout,bias=False,**kwargs)
super(MultiHeadAttention,self).__init__(**kwargs)
self.num_heads = num_heads
self.attendtion = DotProductAttendtion(droupout)
self.W_q = nn.Linear(query_size,num_hiddens, bias)
self.W_k = nn.Linear(key_size,num_hiddens, bias)
self.W_v = nn.Linear(value_size,num_hiddens, bias)
self.W_o = nn.Linear(num_hiddens,num_hiddens, bias)
def forward(self,queries, keys, values, valid_lens):
# queries,keys,values的形状:
# (batch_size,查询或者“键-值”对的个数,num_hiddens)
# valid_lens 的形状:
# (batch_size,)或(batch_size,查询的个数)
# 经过变换后,输出的queries,keys,values 的形状:
# (batch_size*num_heads,查询或者“键-值”对的个数,
# num_hiddens/num_heads)
queries = transpose_qkv(self.W_q(queries),self.num_heads)
keys = transpose_qkv(self.W_k(keys),self.num_heads)
values = transpose_qkv(self.W_v(values),self.num_heads)
if valid_lens is not None:
# 按行重复num_heads遍
valid_lens = torch.repeat_interleave(
valid_lens, repeats=self.num_heads, dim=0)
output = self.attention(queries,keys, values,valid_lens)
output_concat = transpose_output(output, self.num_heads)
return self.W_o(output_concat)
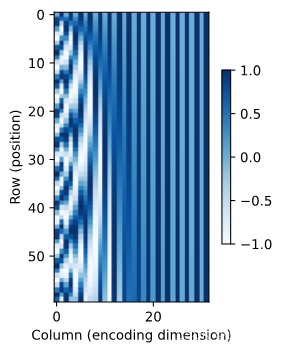
位置编码
作用:self-attention能够看到全局信息,忽略了顺序关系,为了使用序列的顺序信息,通过在输入表示中添加位置编码(positional encoding)来注入绝对的或相对的位置信息
假设输入 X ∈ R n × d X\in \mathcal{R}^{n\times d} X∈Rn×d表示一个序列中 n n n个词元的 d d d维嵌入表示。位置编码使用与输入 X X X相同形状的位置嵌入矩阵 P ∈ R n × d P\in \mathcal{R}^{n\times d} P∈Rn×d表示
固定位置编码:
P
i
,
2
j
=
s
i
n
(
i
1000
0
2
j
/
d
)
P_{i,2j}=sin(\frac{i}{10000^{2j/d}})
Pi,2j?=sin(100002j/di?)
P
i
,
2
j
+
1
=
c
o
s
(
i
1000
0
2
j
/
d
)
P_{i,2j+1}=cos(\frac{i}{10000^{2j/d}})
Pi,2j+1?=cos(100002j/di?)
即对于每个词元,奇数维度采用
c
o
s
cos
cos函数,偶数维度采用
s
i
n
sin
sin函数
包含以下两种信息
- 绝对位置信息:( i , j i,j i,j分别表示词元在序列中的位置、位置编码的维度)
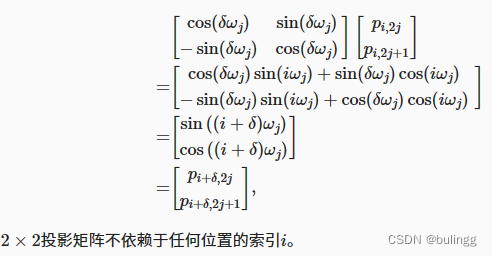
- 相对位置信息:
对于任何确定的位置偏移 δ \delta δ,位置处 i + δ i+\delta i+δ的位置编码可以线性投影位置 i i i处的位置编码来表示。
( P i , 2 j , p i , 2 j + 1 ) → ( p i + δ , p i + δ , 2 j + 1 ) ) (P_{i,2j},p_{i,2j+1}) \to (p_{i+\delta},p_{i+\delta,2j+1})) (Pi,2j?,pi,2j+1?)→(pi+δ?,pi+δ,2j+1?))
缺点:当词嵌入维度较大时,较大维度的位置编码值完全一致
Layer normalization
因为神经网络的Block大部分都是矩阵运算,一个向量经过矩阵运算后值会越来越大,为了网络的稳定性,我们需要及时把值拉回正态分布。归一化的方式可以分为:
- BatchNorm就是通过对batch size这个维度归一化来让分布稳定下来。
- LayerNorm则是通过对Hidden size这个维度归一化来让某层的分布稳定。独立于batch size的算法,所以无论样本数多少都不会影响参与LN计算的数据
原因:神经网络的学习过程中,对于神经网络中间的每一层,其前面层的参数在学习中会不断改变,导致其输出也在不断改变,不利于这一层及后面层的学习,学习收敛速度会变慢,就会出现Internal Covariate Shift(内部协变量偏移). 随着网络的层数不断增大,这种误差就会不断积累,最终导致效果欠佳。
更多可见Batch normalization和Layer normalization
Resnet(Add)
- 在模型能够收敛的情况下,网络越深,模型的准确率越低,同时,模型的准确率先达到饱和,此后迅速下降。称之为网络退化(Degradation),resnet能够有效训练出更深的网络模型(可以超过1000层),使得深网络的表现不差于浅网络,避免网络退化。
- 避免梯度消失/爆炸(主要通过归一化初始化和中间规归一化层来解决)
结构如下:
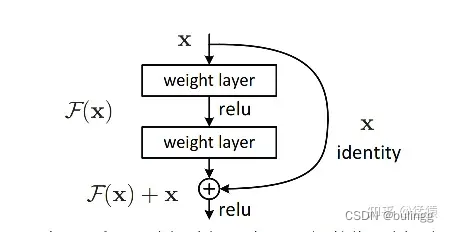
使数据可以跨层流动,残差模块的输出为:
H
(
x
)
=
F
(
x
)
+
x
H(x)=F(x)+x
H(x)=F(x)+x
其中,
F
(
x
)
F(x)
F(x)为残差函数,在网络深层的时候,在优化目标的约束下,模型通过学习使得逼近0(residule learning),让深层函数在学到东西的情况下,又不会发生网络退化的问题。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Unity 实现双击交互
- Java电影购票小程序在线选座订票电影
- 7-16 jmu-Java-02基本语法-03-身份证排序(Java for PTA)
- 漏洞分析|jeecg-boot 未授权SQL注入漏洞(CVE-2023-1454)
- 关于基于STM32使用外部中断控制按键
- Apache StreamPark:让数据流处理更简单、更高效
- 向爬虫而生---Redis 基石篇4 <拓展Set>
- 已解决 ValueError: Setting an array element with a sequence. 问题
- 虹科分享 | 一个高尔夫球用品制造商怎样处理数据?
- SpringMVC源码解析——DispatcherServlet的逻辑处理