基于单高斯视频背景估计的运动目标分割
基于单高斯视频背景估计的运动目标分割
原理
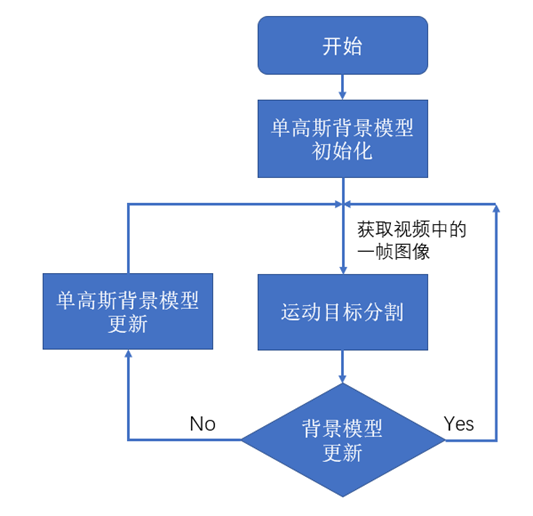
上图为单高斯视频背景估计的运动目标分割流程图,主要包括以下步骤:
(1)单高斯背景模型的初始化。
将背景模型初始化为均值
μ
(
x
,
y
)
\mu(x,y)
μ(x,y)和方差
σ
2
(
x
,
y
)
=
1
\sigma^2(x,y)=1
σ2(x,y)=1的高斯分布。
(2)运动目标分割
利用如下公式对当前帧的每个像素点
I
t
(
x
,
y
)
I^t(x,y)
It(x,y)进行判断,如果像素点的概率值大于阈值
T
T
T:
P
[
I
t
(
x
,
y
)
]
=
1
2
π
[
σ
′
(
x
,
y
)
]
2
exp
?
{
?
[
I
t
(
x
,
y
)
?
μ
t
(
x
,
y
)
]
2
2
[
σ
′
(
x
,
y
)
]
2
}
>
T
P\left[I^{t}(x, y)\right]=\frac{1}{\sqrt{2 \pi\left[\sigma^{\prime}(x, y)\right]^{2}}} \exp \left\{-\frac{\left[I^{t}(x, y)-\mu^{t}(x, y)\right]^{2}}{2\left[\sigma^{\prime}(x, y)\right]^{2}}\right\}>T
P[It(x,y)]=2π[σ′(x,y)]2?1?exp{?2[σ′(x,y)]2[It(x,y)?μt(x,y)]2?}>T
则判定该像素点为背景点,否则为前景点。实际实现中,可以用以下公式代替判断:
∣
I
(
x
,
y
)
?
μ
t
(
x
,
y
)
∣
<
β
σ
t
(
x
,
y
)
\left|I(x, y)-\mu^{t}(x, y)\right|<\beta \sigma^{t}(x, y)
?I(x,y)?μt(x,y)
?<βσt(x,y)
表示认为正态分布离均值中心 ± β σ t ( x , y ) \pm \beta \sigma^{t}(x, y) ±βσt(x,y)范围内的像素点属于背景。在掩码中将属于背景的像素点置零,其他置1,得到运动目标的分割掩码。用掩码对当前帧分割,即可得到运动目标。
(3) 单高斯背景模型的更新
μ
t
(
x
,
y
)
=
(
1
?
α
)
μ
t
?
1
(
x
,
y
)
+
α
I
t
(
x
,
y
)
[
σ
t
(
x
,
y
)
]
2
=
(
1
?
α
)
[
σ
t
?
1
(
x
,
y
)
]
2
+
α
[
I
t
(
x
,
y
)
?
μ
t
(
x
,
y
)
]
2
\begin{array}{c} \mu^{t}(x, y)=(1-\alpha) \mu^{t-1}(x, y)+\alpha I^{t}(x, y) \\ {\left[\sigma^{t}(x, y)\right]^{2}=(1-\alpha)\left[\sigma^{t-1}(x, y)\right]^{2}+\alpha\left[I^{t}(x, y)- \mu^{t}(x, y)\right]^{2}} \end{array}
μt(x,y)=(1?α)μt?1(x,y)+αIt(x,y)[σt(x,y)]2=(1?α)[σt?1(x,y)]2+α[It(x,y)?μt(x,y)]2?
式中 α \alpha α为更新参数,表示背景更新的速度快慢,取值范围为0~1。 t ? 1 t-1 t?1表 示 前一 帧, t t t表示当前帧。可以指定到达一定帧数时停止更新。
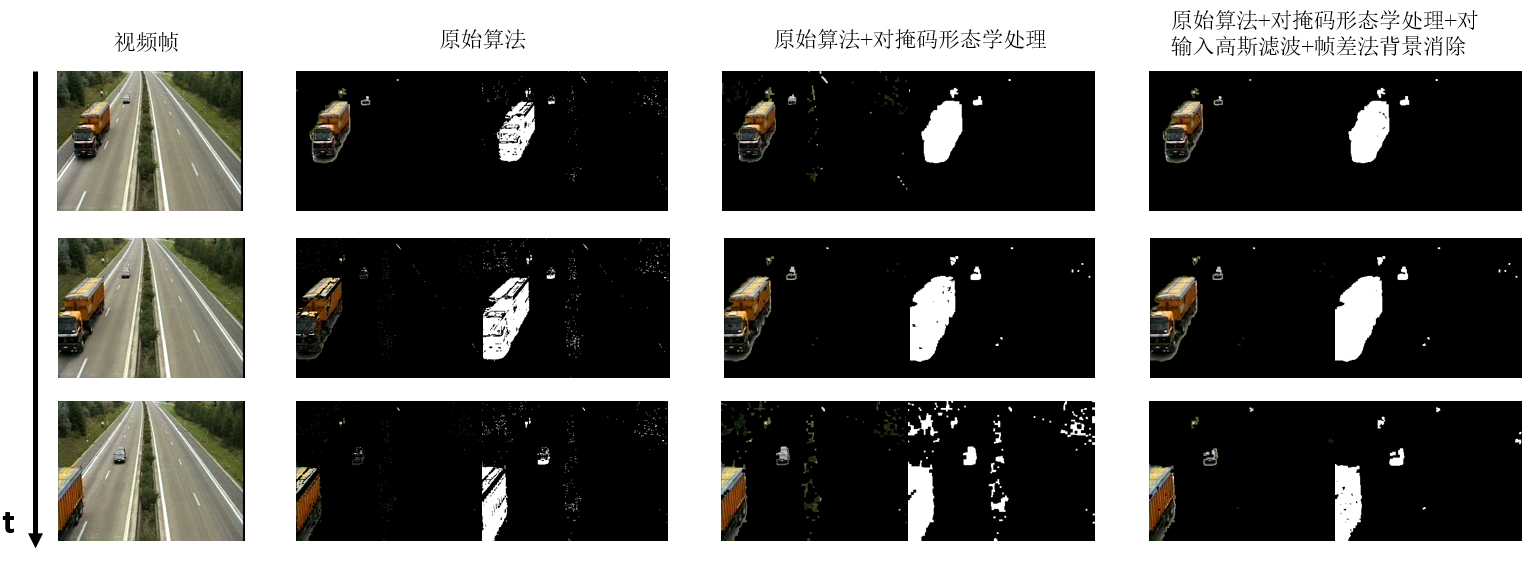
改进
针对单高斯背景估计算法容易误判背景(将背景点判定为运动目标)的问题,对其进行改进:
(1) 使用形态学方法对掩码进行处理,填补掩码的各个非零区域。
(2) 对输入进行高斯滤波,平滑输入的图像,从而减少因为形态学处理导致的更明显的掩码误判。
(3) 帧差法:将连续两帧的图像数据进行差分法,即进行相减操作, 如果其相减后的绝对值小于阈值,则认为其为背景点,令像素点变为0。 通过帧差法减少背景点的误判。
代码
import cv2
import numpy as np
np.set_printoptions(precision=2, suppress=True)
beta = 1.5 # 前后景区分常数
alpha = 0.015 # 学习率
# 读取视频
cap = cv2.VideoCapture('高速公路.AVI')
isFirst = True
i = 0
while cap.isOpened():
ret, frame = cap.read()
if frame is not None:
i += 1
print(i)
gray = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY)
if i == 1:
mu = np.zeros(gray.shape)
var = np.ones(gray.shape)
last = np.zeros(gray.shape)
else:
# 标识目标
gray = cv2.GaussianBlur(gray, (3, 3), 0, 1)
gray1 = gray.copy()
gray1[np.abs(gray - mu) > beta * np.sqrt(var)] = 1
gray1[np.abs(gray - mu) < beta * np.sqrt(var)] = 0
gray2 = gray1.copy()
kernel = np.ones((3, 3), np.uint8)
kernel2 = np.ones((5, 5), np.uint8)
gray2 = cv2.dilate(gray2, kernel, iterations=3)
gray2 = cv2.erode(gray2, kernel2, iterations=1)
gray2[np.abs(gray - last) < 10] = 0
gray2 = cv2.dilate(gray2, kernel, iterations=1)
# 更新参数
if i<200:
mu = (1 - alpha) * mu + alpha * gray
var = (1 - alpha) * var + alpha * (gray - mu) ** 2
cv2.imshow('RGB', frame)
cv2.imshow('tracking_gray', gray1 * 255)
cv2.imshow('tracking2_gray', gray2 * 255)
cv2.imshow('tracking', np.expand_dims(gray1, -1).repeat(3, axis=2) * frame)
cv2.imshow('tracking2', np.expand_dims(gray2, -1).repeat(3, axis=2) * frame)
cv2.waitKey(0)
last = gray.copy()
if 0xFF == ord('q'):
break
else:
cap = cv2.VideoCapture('高速公路.AVI')
结果
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 用Go语言实现HTTP API的安全验证
- LoadBalancer 替换 Ribbon
- 【高等数学之定积分】
- 29道memcached面试题含答案(很全)
- 计算机毕业设计-----SSH固定资产管理系统
- 模型训练出现 loss = nan
- ICLR 2024 Oral InfoBatch 助力大模型时代训练加速!FaceChain与NUS尤洋团队最新工作!
- 代码随想录算法训练营第十三天 |二叉树递归遍历、非递归遍历、统一非递归
- Wargames与bash知识16
- 程序员超强面试技巧!!!!