【Emotion】 自动驾驶最近面试总结与反思
- outline
- 写在前面
- 面试问题回顾和答案
- 展望
写在前面
最近由于公司部门即将撤销,开始了新一轮准备。
-
发现现在整体行情不太乐观,很看重过去是干啥的经验。比如之前做L2功能算法有涉及到规划的知识,以及说明了自己做demo和自学了知识,包括和控制重合的也有非线性优化的知识,想转去做L3的乘用车的行车规划,想做小弟抱大腿不求工资,却难度不小。
-
同时本次面试我coding环节答得不好,(其实也是半年前大家问的比较简单)。准备时间大约3周多,自己刷题的时候感觉中等题目给自己,时间不紧张的话,三道题可出两道的样子。但是实际考试的时候,甚至大半年前的做过的题目还忘记了。那时候把剑指困难以外整了一遍,以为可以了。但现在这一点有所反思,刷题的时候太侧重应试了,导致思路很零散,很多都要靠心态不慌的时候慢慢推。AC是debug和时间堆出来的。 现在发现一个大佬总结,跟着他在学习https://www.programmercarl.com/。 纯数量论的话,听一位同学说要刷个小三百,我目前还得再练练。考题没发现有局限,很多思想和数据类型都会考到。
-
其次,市场上现在对于感知、定位、建图需求大,同时规划需求》控制。资深的工程师找工作相对容易一些。L2功能算法也有一定需求,但是我还没有太多投递,知识都有重合的地方,做功能还是l3规控都要学习准备着。
-
最后感觉之前学习和准备的东西有点发散,而且过于看重刷题,反而是项目里约定俗成、一带而过、或者没有用到的基础知识容易翻车一定要再看一遍。八股也被问了。
总之,感觉这一次精力发散,很多新学习的东西都想去做,消耗量时间和精力来准备,行情不好的时候,我这样的初级工程师总归还是先做好本行,伺机待发不断学习。
考题
业务(这里只非个人强项目相关,通用知识)
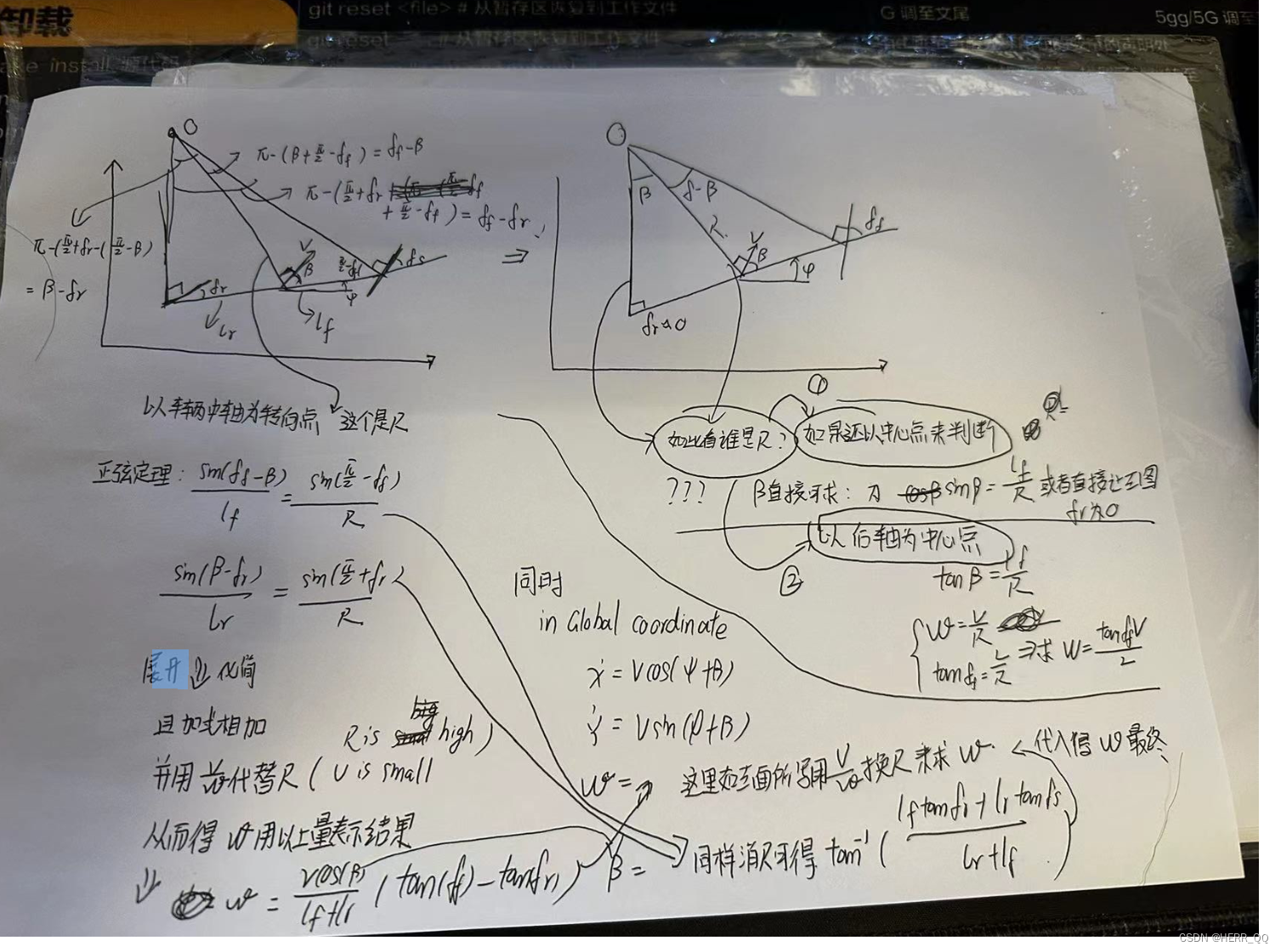
被考到了运动学模型,以转向中心在车上为考题,我推理的还是太死板,见左,考试的时候考了右边简化了后轮转角,但是这样有一个问题,b可以直接计算了,同时转向中心看起来也以后轮计算比较合理了,所以直接迷糊。想回忆原来的算法直接带公式然后后轮看成0,但是发现这样其实直接就可以计算了。
其他问题:
- 卡尔曼如何调参
- 怎么判断车道线平行
- 纵向弯道降速方法
- 朋友被问实现pid
- 朋友被问找点到直线、到平面距离
- 其他很多问题都是我项目强相关的问题了不列举
coding
总体感觉在中等里的中等水平但是scope很广,估计继续面试还能遇到新的考察点
快速排序
三数之和
合并区间
滑动窗口最大值
全排列
股票
小岛周长
A到B路径和
八股
cpp的各种 cpp11的新标准 我常用的容器 内存上有什么特点 使用一些方法时候的行为 虚函数 虚表 虚析构
define 堆栈特点
其他
- 有几家问了语言问题,并有英语面试
- 一定要表现出特想做这个,有两家感觉面试尚可,但是我老是问东问西,问可不可以转。结果无了,其中一家拜托学长去问:对方说觉得我经验不多但是可以培养,不过看我可能不想做这个方向于是无了。 总之能力不足的同时就要用渴望和激情来弥补。
- 面试坦诚以待,能行就行,做过的东西太杂了,有的东西忘记了,不行我想好开滴滴或者摆摆地摊了
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【动态规划】09路径问题_最小路径和_C++(medium)
- 大数据HCIE成神之路之特征工程——特征选择
- “MultipleSportsTimers“app Tech Support(URL)
- 2024最新:嵌入式学习规划二期
- 为“EYE”加码,蔡司光学公益助童活动走进湖南省宁乡市
- 信号处理基础之噪声与降噪(一) | 噪声分类及python代码实现
- 本地无法连接注册中心eureka,如何进行feign调用,并快速启动本地调试?
- 跨境电商的语言障碍:翻译工具的必要性
- web网页设计学习记录(一)
- 【C++进阶07】哈希表and哈希桶