ROS Gazebo仿真 实例演示
发布时间:2024年01月11日
实现流程:
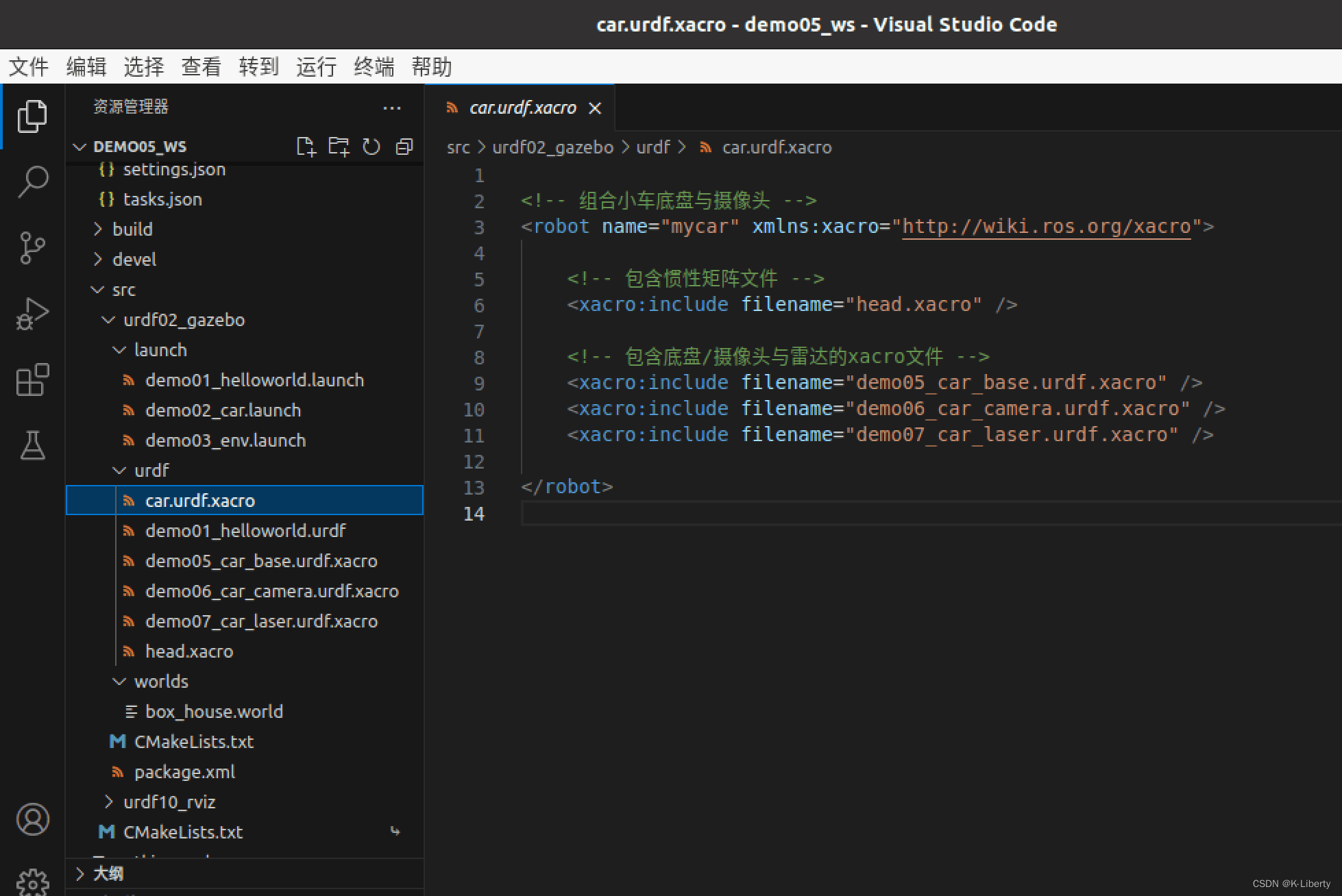
1、编写封装惯性矩阵算法的 xacro 文件
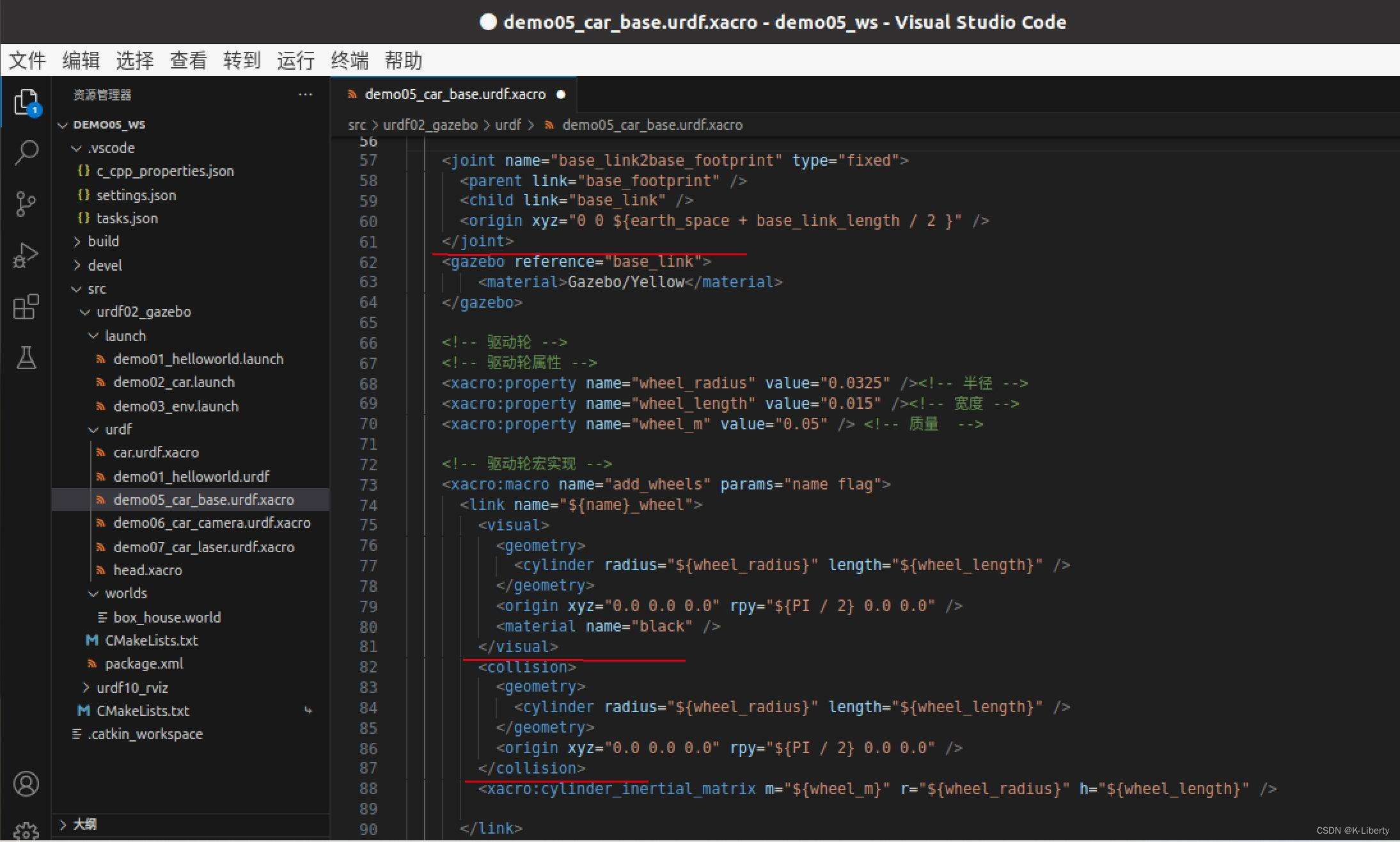
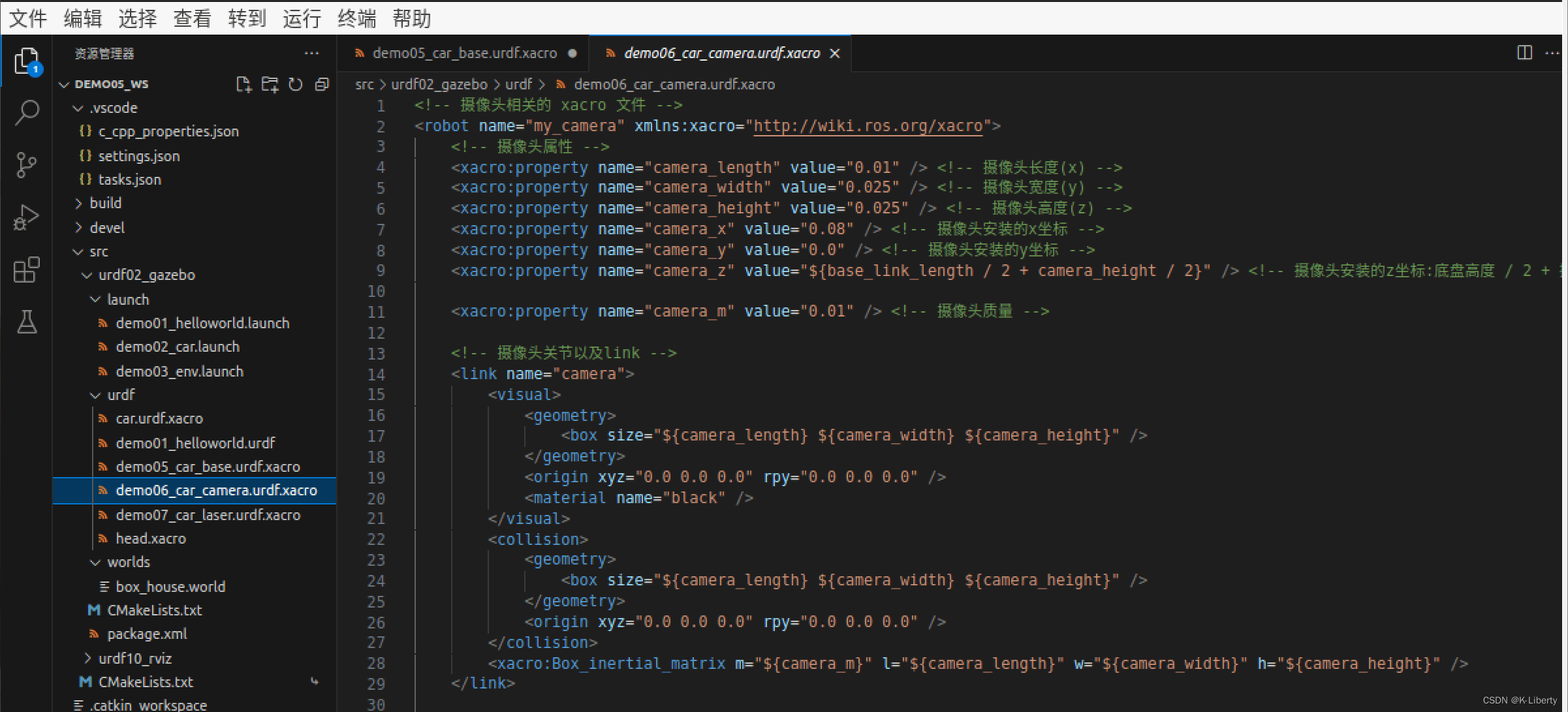
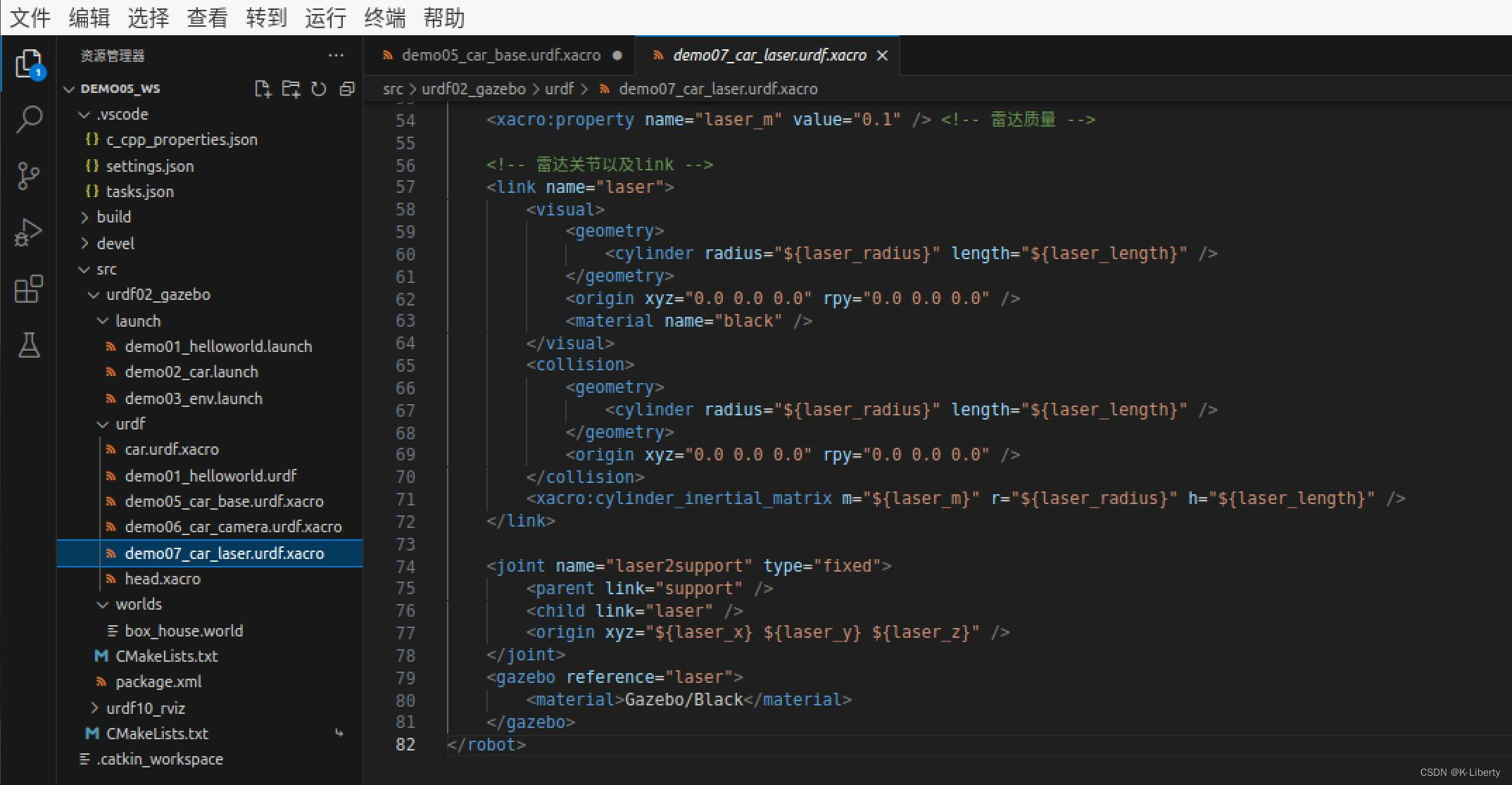
2、机器人模型中的每一个 link 添加 collision 和 inertial 标签,并且重置颜色属性
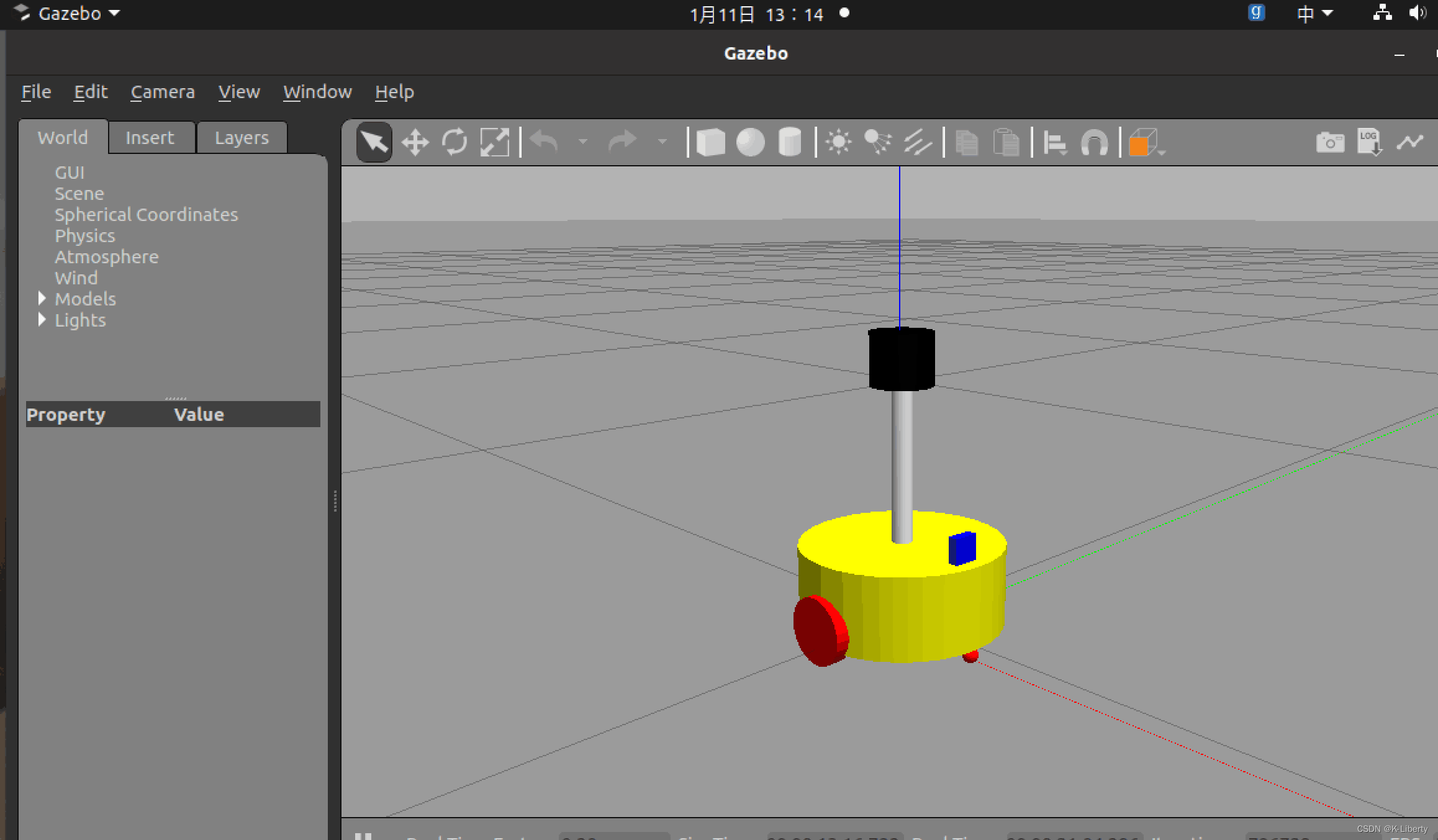
3、在 launch 文件中启动 gazebo 并添加机器人模型
其中的launch文件主要做了两项工作:
(1)启动机器人的状态发布节点,同时加载带有Gazebo属性的机器人URDF模型。
(2)启动Gazebo,并且将机器人模型加载到Gazebo仿真环境中。










文章来源:https://blog.csdn.net/2301_79503228/article/details/135526023
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 直流无刷电机FOC控制原语
- 评估指标中的RMSE,MAE,MAPE分别表示什么,取值范围一般多大,优缺点有哪些?
- 学习Opencv(蝴蝶书/C++)——4.图形和大型数组类型(下)
- 报错解析:apt-get install curl -y‘ returned a non-zero code: 100
- linux复习笔记07(兄弟连)----链接命令
- P5736 【深基7.例2】质数筛题解
- 书生·浦语大模型实战营第四次课堂笔记
- Linux中常使用的命令之ls、cd、pwd、mkdir、rmdir
- k-means算法的中文名字是什么,是用来干什么的呢。
- Linux如何查看执行过命令的时间?