十五、W5100S/W5500+RP2040之MicroPython开发<Modbus示例>
文章目录
1. 前言
??在这个智能硬件和物联网时代,MicroPython和树莓派PICO正以其独特的优势引领着嵌入式开发的新潮流。MicroPython作为一种精简优化的Python 3语言,为微控制器和嵌入式设备提供了高效开发和简易调试的
??当我们结合WIZnet W5100S/W5500网络模块,MicroPython和树莓派PICO的开发潜力被进一步放大。这两款模块都内置了TCP/IP协议栈,使得在嵌入式设备上实现网络连接变得更加容易。无论是进行数据传输、远程控制,还是构建物联网应用,它们都提供了强大的支持。
??本章我们将以WIZnet W5100S为例,以MicroPython的开发方式进行Modbus TCP通信示例
2. 相关网络信息
2.1 简介
??Modbus TCP是一种基于TCP/IP协议的应用层协议,它是Modbus协议的扩展。Modbus协议是一种串行通信协议,最初由Modicon公司在1979年开发,用于工业自动化控制系统中设备之间的通信。Modbus TCP则是将Modbus协议转换为基于以太网的TCP/IP协议,以支持更广泛的设备和系统集成。
2.2 指令构成
Modbus TCP的数据帧可分为两部分:MBAP+PDU。MBAP为报文头,长度为7字节。PDU由功能码+数据组成。功能码为1字节,数据长度不定,由具体功能决定。
根据对象的不同,modbus的功能码有:0x01 读线圈,0x05 写单个线圈,0x0F 写多个线圈,0x02 读离散量输入,0x04 读输入寄存器,0x03 读保持寄存器,0x06 写单个保持寄存器,0x10 写多个保持寄存器。

2.3 优点
- 简单性:Modbus TCP协议简单易用,可以方便地与其他通信协议进行集成。
- 可靠性:Modbus TCP协议运行在TCP/IP协议上,这使得它具有很高的可靠性。TCP/IP协议是互联网的基础,它能够保证数据的及时、完整传输。
- 广泛的应用场景:Modbus TCP协议可以应用于各种场景,包括工业自动化控制系统、能源管理、环境监测、楼宇自控等领域。
- 开放性:Modbus TCP协议是一种开放的协议,这意味着它可以被任何设备或系统使用,而不仅仅局限于特定的硬件或软件。
- 实时性:Modbus TCP协议能够支持实时数据通信,这对于需要快速响应的应用来说非常重要。
2.4 应用
- 设备间的数据交换:在工业自动化控制系统中,Modbus TCP协议通常用于不同控制系统之间的数据交换。
- 远程访问和控制:由于Modbus TCP协议基于TCP/IP协议,因此它可以通过互联网进行远程访问和控制,这对于需要远程监控和管理的应用来说非常有用。
- 集成其他通信协议:由于Modbus TCP协议的开放性,它可以方便地与其他通信协议进行集成,这使得它可以在各种不同的系统和设备中使用。
- 实时数据通信:Modbus TCP协议能够支持实时数据通信,这对于需要实时监控和控制的应用来说非常重要。例如,在能源管理和环境监测等领域,实时数据通信能够帮助实现更精确和及时的控制和决策。
3. WIZnet以太网芯片
WIZnet 主流硬件协议栈以太网芯片参数对比
| Model | Embedded Core | Host I/F | TX/RX Buffer | HW Socket | Network Performance |
|---|---|---|---|---|---|
| W5100S | TCP/IPv4, MAC & PHY | 8bit BUS, SPI | 16KB | 4 | Max 25Mbps |
| W6100 | TCP/IPv4/IPv6, MAC & PHY | 8bit BUS, Fast SPI | 32KB | 8 | Max 25Mbps |
| W5500 | TCP/IPv4, MAC & PHY | Fast SPI | 32KB | 8 | Max 15Mbps |
- W5100S/W6100 支持 8bit数据总线接口,网络传输速度会优于W5500。
- W6100 支持IPV6,与W5100S 硬件兼容,若已使用W5100S的用户需要支持IPv6,可以Pin to Pin兼容。
- W5500 拥有比 W5100S更多的 Socket数量以及发送与接收缓存
相较于软件协议栈,WIZnet的硬件协议栈以太网芯片有以下优点:
- 硬件TCP/IP协议栈:WIZnet的硬件协议栈芯片提供了一种硬件实现的TCP/IP协议栈,这种硬件实现的协议栈比软件实现的协议栈具有更好的性能和稳定性。
- 不需要额外的嵌入式系统软件栈和内存资源:由于所有的以太网传输和接收操作都由独立的以太网控制器处理,因此不需要额外的嵌入式系统软件栈和内存资源。
- 抵抗网络环境变化和DDoS攻击:与易受网络环境变化和DDoS攻击影响的软件TCP/IP协议栈相比,硬件协议栈芯片能够提供更稳定的以太网性能。
- 适用于低规格的嵌入式系统:即使在低规格的嵌入式系统中,使用WIZnet的硬件协议栈芯片也可以比使用软件TCP/IP协议栈的高规格系统显示出更高效的互联网应用操作性能。
4. Modbus TCP通信示例讲解以及使用
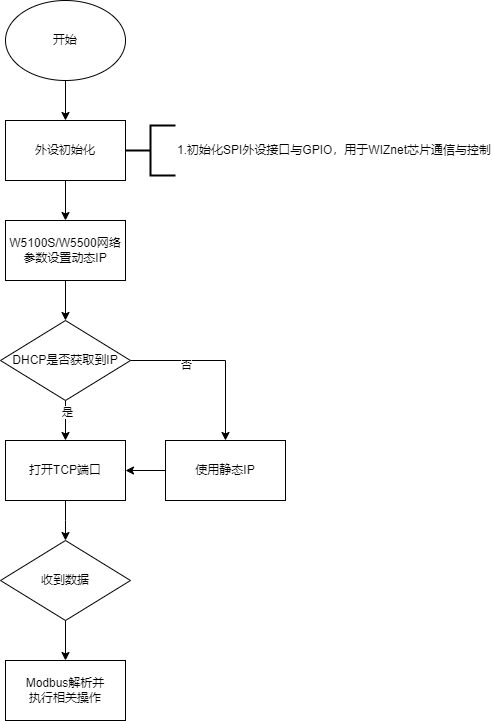
4.1 程序流程图
4.2 测试准备
软件:
- Thonny
- Modbus Poll
硬件:
- W5100S IO模块 + RP2040 树莓派Pico开发板 或者 WIZnet W5100S-EVB-Pico开发板
- Micro USB 接口的数据线
- 网线
4.3 连接方式
- 通过数据线连接PC的USB口
- 当使用W5100S/W5500 IO模块连接RP2040时
- RP2040 GPIO 16 <----> W5100S/W5500 MISO
- RP2040 GPIO 17 <----> W5100S/W5500 CS
- RP2040 GPIO 18 <----> W5100S/W5500 SCK
- RP2040 GPIO 19 <----> W5100S/W5500 MOSI
- RP2040 GPIO 20 <----> W5100S/W5500 RST
- 通过网线直接连接PC网口(或:PC和设备都通过网线连接交换机或路由器LAN口)
4.4 相关代码
??我们直接打开modbus_tcp_server.py文件。
第一步:可以看到在w5x00_init()函数中,进行了SPI的初始化。以及将spi相关引脚和复位引脚注册到库中,后续则是激活网络,并使用DHCP配置网络地址信息,当DHCP失败时,则配置静态网络地址信息。当未配置成功时,会打印出网络地址相关寄存器的信息,可以帮助我们更好的排查问题。
第二步:在modbus_run()函数中,会打开一个TCP服务器,然后等待接收到数据(即Modbus 指令)。
第三步:对Modbus指令进行核对,然后解析并作出相应的操作以及回复。
from usocket import socket
from machine import Pin,SPI
import network
import time
local_ip = ''
local_port = 5000
led = Pin(25, Pin.OUT)
"""
W5x00 chip initialization.
param: None
returns: None
"""
def w5x00_init():
global local_ip
spi=SPI(0,2_000_000, mosi=Pin(19),miso=Pin(16),sck=Pin(18))
nic = network.WIZNET5K(spi,Pin(17),Pin(20)) #spi,cs,reset pin
nic.active(True)
try:
#DHCP
print("\r\nConfiguring DHCP")
nic.ifconfig('dhcp')
except:
#None DHCP
print("\r\nDHCP fails, use static configuration")
nic.ifconfig(('192.168.1.20','255.255.255.0','192.168.1.1','8.8.8.8'))#Set static network address information
#Print network address information
print("IP :",nic.ifconfig()[0])
print("Subnet Mask:",nic.ifconfig()[1])
print("Gateway :",nic.ifconfig()[2])
print("DNS :",nic.ifconfig()[3],"\r\n")
local_ip = nic.ifconfig()[0]
#If there is no network connection, the register address information is printed
while not nic.isconnected():
time.sleep(1)
print(nic.regs())
"""
Modbus packet parsing.
param1: receive data
param2: connecting object
returns: None
"""
def modbus_parsing(data,conn):
senddata = bytearray(128)
if data[2] != 0x00 and data[3] != 0x00:
print("protocol error")
else:
if data[6] == 0x01:
if data[7] == 0x01:
if int(data[8])+int(data[9]) == 0 and int(data[10])+int(data[11])==1:
print("Read OK!")
senddata[0] = data[0]
senddata[1] = data[1]
senddata[2] = data[2]
senddata[3] = data[3]
senddata[4] = 0x00
senddata[5] = 0x04
senddata[6] = 0x01
senddata[7] = 0x01
senddata[8] = 0x01
senddata[9] = led.value()
conn.send(senddata)
else:
print("address error!")
elif data[7] == 0x05:
if int(data[8])+int(data[9]) == 0:
if data[10] == 0xFF:
print("LED ON!")
led.value(1)
elif data[10] == 0x00:
print("LED OFF!")
led.value(0)
else:
print("value error!")
conn.send(data)
else:
print("address error!")
else:
print("The function code is not processed!")
else:
print("slave address error!")
"""
Start the Modbus TCP server.
param: None
returns: None
"""
def modbus_run():
global local_ip
global local_port
s = socket()
s.bind((local_ip, local_port)) #Source IP Address
s.listen(0)
print("remote ip:",local_ip,",port:",local_port)
conn, addr = s.accept()
print("type",type(conn))
print("Connected:", conn, "address:", addr[0])
while True:
data = conn.recv(2048)
if data != 'NULL':
modbus_parsing(data,conn)
def main():
print("WIZnet chip Modbus TCP example")
w5x00_init()
modbus_run()
if __name__ == "__main__":
main()
4.5 烧录验证
要测试以太网示例,必须将开发环境配置为使用Raspberry Pi Pico。
- 所需的开发环境
- 如果你必须编译MicroPython,则必须使用Linux或Unix环境。
第一步:将程序复制到Thonny中,然后选择环境为Raspberry Pi Pico,最后点击运行。
第二步:在Modbus Poll上进行连接,地址为开发板的地址,端口号为5000。
第三步:在Modbus Poll上下发指令控制LED,并读取LED灯状态。
注意:因为MicroPython的print函数是启用了stdout缓冲的,所以有时候并不会第一时间打印出内容。
5. 注意事项
- 如果采用的是WIZnet的W5500来实现本章的示例,则只需烧录W5500的固件并运行示例程序即可。
- 示例只对读取单个线圈(0x01)进行了处理,并且读取长度必须为1
6. 相关链接
想了解更多,评论留言哦!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!