020 OpenCV 轮廓、外接圆、外接矩形
发布时间:2023年12月17日
一、环境
本文使用环境为:
- Windows10
- Python 3.9.17
- opencv-python 4.8.0.74
二、原理
2.1 函数接口
OpenCV中的findContours函数用于检测图像中的轮廓。轮廓是图像中连续的点集,它们通常表示物体的边缘或形状。在计算机视觉和图像处理中,轮廓分析是一种常见的任务,例如目标检测、形状识别等。
findContours函数的基本语法如下:
contours, hierarchy = cv.findContours(image, mode, method[, contours[, hierarchy[, offset ]]])参数说明:
image:输入图像,通常是一个二值图像。mode:轮廓检索模式。这个参数决定了函数如何返回轮廓。常见的模式有:cv2.RETR_EXTERNAL:只检索最外层的轮廓。cv2.RETR_LIST:检索所有轮廓并将其保存到列表中。cv2.RETR_CCOMP:检索所有轮廓,并将它们组织到两个不同的层次结构中(例如,外部和内部)。cv2.RETR_TREE:检索所有轮廓,并将它们组织到一个层次结构中。
method:轮廓的近似方法。常见的有:cv2.CHAIN_APPROX_SIMPLE:压缩水平、垂直和对角分段。cv2.CHAIN_APPROX_NONE:存储所有的段(4点)。cv2.CHAIN_APPROX_SIMPLE?和?cv2.CHAIN_APPROX_DP:使用动态规划压缩轮廓。
contours(可选):输出参数,返回找到的轮廓。hierarchy(可选):输出参数,返回有关轮廓之间关系的信息。offset(可选):偏移量,用于调整轮廓的位置。
返回值:
- 如果指定了?
contours?参数,则返回找到的轮廓。 - 如果指定了?
hierarchy?参数,则返回有关轮廓之间关系的信息。
2.2 原理理解
在OpenCV库中,函数cv2.findContours()是一个用于查找图像中物体轮廓的重要工具。该函数的主要参数包括:输入图像、轮廓检索模式和近似方法等。
首先,输入的图像通常是二值化的单通道图像,其中黑色代表背景,白色代表目标物体。这样的图像通常通过Canny或拉普拉斯等边缘检测算子进行处理得到。
其次,轮廓检索模式决定了如何处理图像中的轮廓。例如,cv2.RETR_EXTERNAL只检测外轮廓;cv2.RETR_LIST检测的轮廓不建立等级关系;cv2.RETR_CCOMP建立两个等级的轮廓,上一层为外边界,内层为内孔的边界;而cv2.RETR_TREE则建立一个等级树结构的轮廓。
最后,近似方法决定了如何简化轮廓。例如,cv2.CHAIN_APPROX_SIMPLE就表示用尽可能少的像素点表示轮廓。
函数的返回值包括两个部分:contours和hierarchy。其中,contours是一个包含所有检测到的轮廓信息的数组,每个轮廓又是由若干个点所构成的;而hierarchy则是一个包含了各轮廓之间的层次关系的数组。
三、完整代码
from __future__ import print_function
import cv2 as cv
import numpy as np
import argparse
import random as rng
rng.seed(12345)
def thresh_callback(val):
threshold = val
# 使用canny检测边缘
canny_output = cv.Canny(src_gray, threshold, threshold * 2)
# 查找轮廓
contours, _ = cv.findContours(canny_output, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
# 这里在分配空间
contours_poly = [None]*len(contours)
boundRect = [None]*len(contours)
centers = [None]*len(contours)
radius = [None]*len(contours)
# 依据canny检测出来的边缘,下面查找边缘的轮廓、边缘的外接圆、外接矩形
for i, c in enumerate(contours):
contours_poly[i] = cv.approxPolyDP(c, 3, True) # 轮廓
boundRect[i] = cv.boundingRect(contours_poly[i]) # 外接矩形
centers[i], radius[i] = cv.minEnclosingCircle(contours_poly[i]) # 外接圆
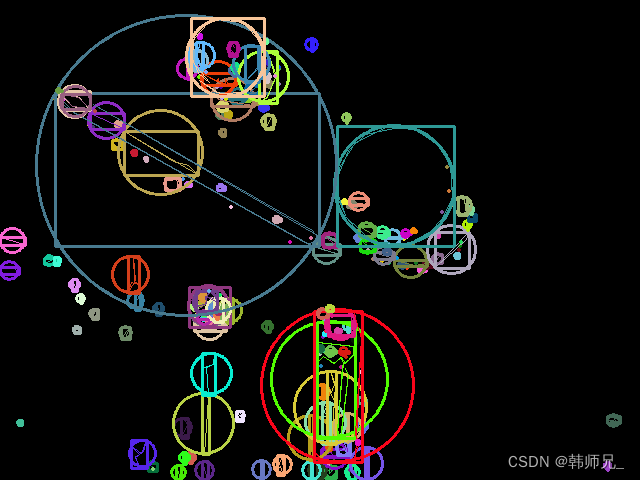
# 搞一张黑色的图,用于绘制
drawing = np.zeros((canny_output.shape[0], canny_output.shape[1], 3), dtype=np.uint8)
# 绘制轮廓、矩形、圆
for i in range(len(contours)):
color = (rng.randint(0,256), rng.randint(0,256), rng.randint(0,256))
cv.drawContours(drawing, contours_poly, i, color)
cv.rectangle(drawing, (int(boundRect[i][0]), int(boundRect[i][1])), \
(int(boundRect[i][0]+boundRect[i][2]), int(boundRect[i][1]+boundRect[i][3])), color, 2)
cv.circle(drawing, (int(centers[i][0]), int(centers[i][1])), int(radius[i]), color, 2)
cv.imshow('Contours', drawing)
parser = argparse.ArgumentParser(description='Code for Creating Bounding boxes and circles for contours tutorial.')
parser.add_argument('--input', help='Path to input image.', default='data/stuff.jpg')
args = parser.parse_args()
# 读取图片
src = cv.imread(cv.samples.findFile(args.input))
if src is None:
print('Could not open or find the image:', args.input)
exit(0)
# 彩色图转灰度图
src_gray = cv.cvtColor(src, cv.COLOR_BGR2GRAY)
# 图片平滑
src_gray = cv.blur(src_gray, (3,3))
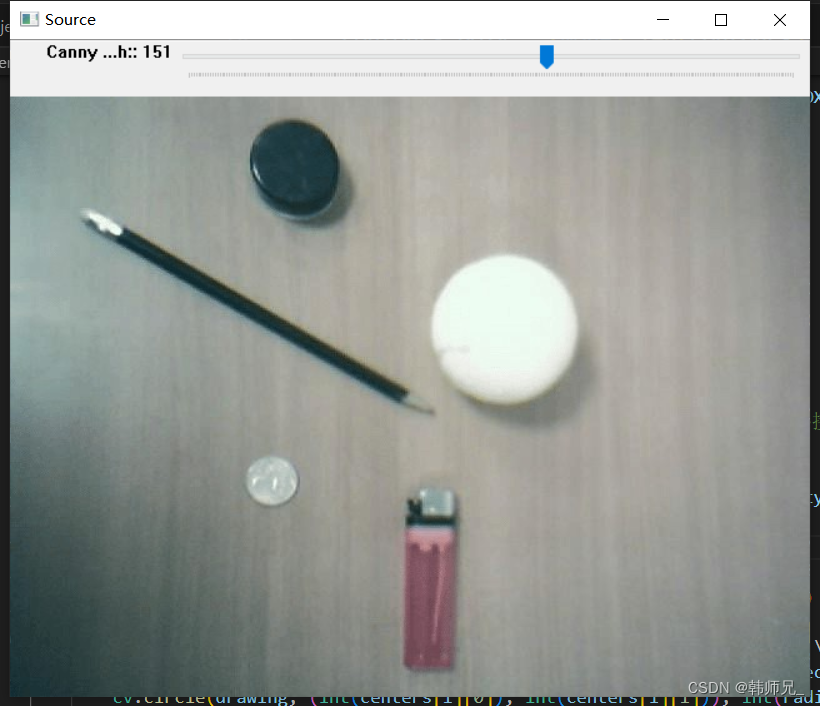
# 显示原彩色图
source_window = 'Source'
cv.namedWindow(source_window)
cv.imshow(source_window, src)
# 创建滑条,控制canny查找边缘的阈值
max_thresh = 255
thresh = 100 # canny初始化阈值
cv.createTrackbar('Canny thresh:', source_window, thresh, max_thresh, thresh_callback)
thresh_callback(thresh)
cv.waitKey()
文章来源:https://blog.csdn.net/m0_72734364/article/details/134965585
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 基于51单片机的恒温淋浴器控制电路设计
- 信息管理毕设分享(含算法) 深度学习语义分割实现弹幕防遮(源码分享)
- 中心性算法归纳
- 阿里云2024年优惠券活动大全
- 【cmake实战:番外】交叉编译——Linaro
- 下一代神经网络
- [LeetCode周赛复盘] 第 379 场周赛20240107
- 2024年最全春节攻略,外贸人看这一篇就够了
- Flutter 页面嵌入 Android原生 View
- 8-docker输出can not create unix socket /var/run/docker.sock: is a directory