pcl之滤波器(二)
发布时间:2024年01月25日

pcl滤波器
pcl一共是有十二个主要模块,详细了解可以查看官网。https://pcl.readthedocs.io/projects/tutorials/en/latest/#basic-usage
今天学习一下pcl的滤波器模块。
滤波器模块,官网一共是提供了6个例程,今天看第三个、第四个。
滤波器移出离群点
激光扫描通常会产生不同点密度的点云数据集。此外,测量误差会导致稀疏的异常值,从而影响结果。这使得局部点云特征(如表面法线或曲率变化)的估计变得复杂,导致错误的值,进而可能导致点云配准失败。其中一些不规则现象可以通过对每个点的邻域进行统计分析来解决,并去除那些不符合特定标准的点。
测试的pcd文件地址
https://raw.github.com/PointCloudLibrary/data/master/tutorials/table_scene_lms400.pcd
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h> //声明点类型
#include <pcl/filters/statistical_outlier_removal.h>
int
main (int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
// 定义读取对象
pcl::PCDReader reader;
// 读取点云文件
reader.read<pcl::PointXYZ> ("../table_scene_lms400.pcd", *cloud);
std::cerr << "Cloud before filtering: " << std::endl;
std::cerr << *cloud << std::endl;
// 创建滤波器,对每个点分析的临近点的个数设置为50 ,并将标准差的倍数设置为1 这意味着如果一
//个点的距离超出了平均距离一个标准差以上,则该点被标记为离群点,并将它移除,存储起来
pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor; //创建滤波器对象
sor.setInputCloud (cloud); //设置待滤波的点云
sor.setMeanK (50); //设置在进行统计时考虑查询点临近点数
sor.setStddevMulThresh (1.0); //设置判断是否为离群点的阀值
sor.filter (*cloud_filtered); //存储
std::cerr << "Cloud after filtering: " << std::endl;
std::cerr << *cloud_filtered << std::endl;
pcl::PCDWriter writer;
writer.write<pcl::PointXYZ> ("../table_scene_lms400_inliers.pcd", *cloud_filtered, false);
//true:滤波结果取反,被过滤的点
sor.setNegative (true);
sor.filter (*cloud_filtered);
writer.write<pcl::PointXYZ> ("../table_scene_lms400_outliers.pcd", *cloud_filtered, false);
return (0);
}
代码都有注释,看一下结果吧。
原图:
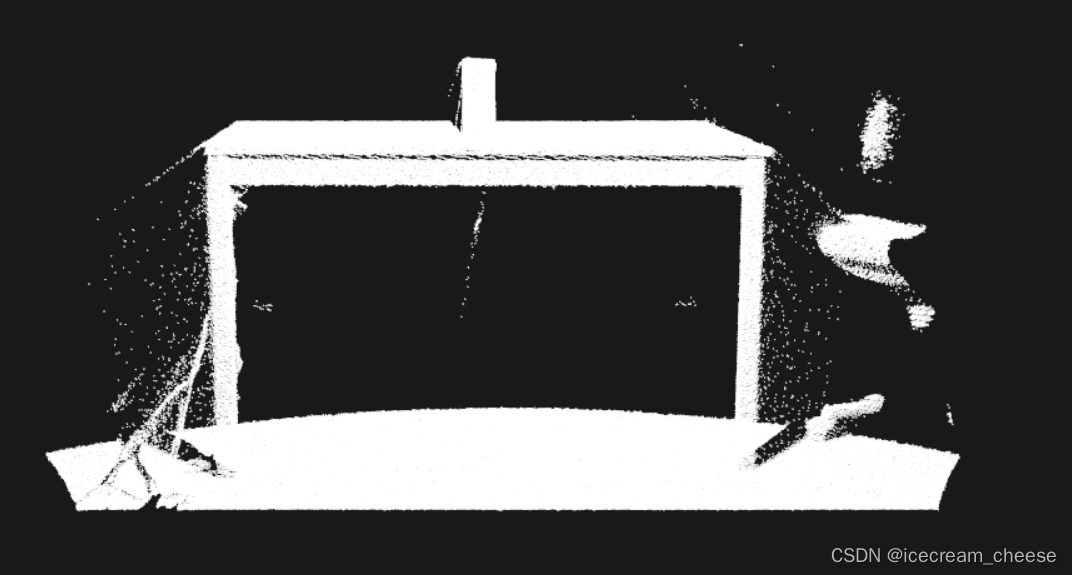
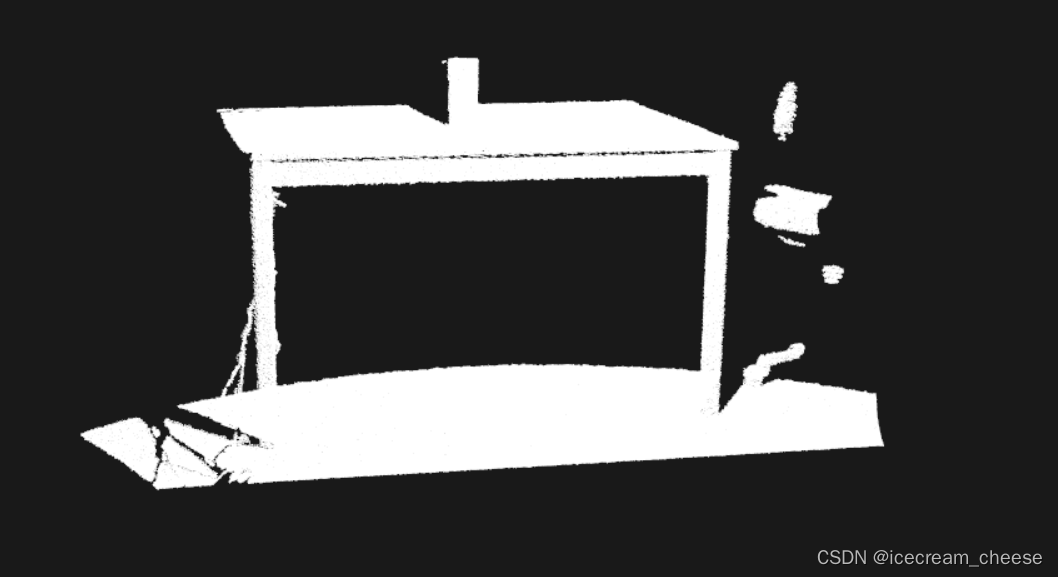
inliers:
outliers:
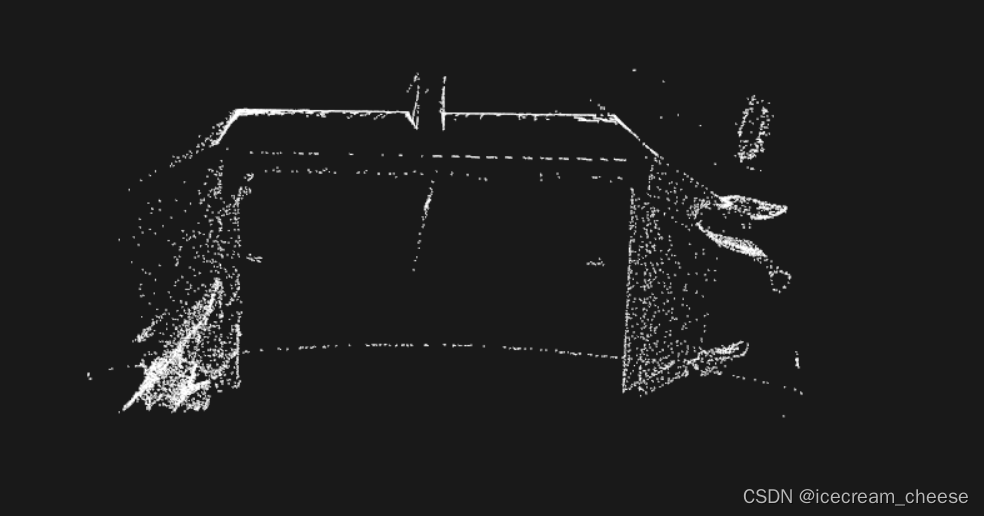
感觉效果还是比较理想的。
CMakeLists.txt:
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(statistical_removal)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (statistical_removal statistical_removal.cpp)
target_link_libraries (statistical_removal ${PCL_LIBRARIES})
使用参数化模型投影点
这部分主要是学习如何将点投影到参数化模型上(例如,平面,球体等)。参数模型是通过一组系数给出的——在平面的情况下,通过它的方程:ax + by + cz + d = 0。
看一下代码:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h> //声明点类型
#include <pcl/ModelCoefficients.h> //模型系数头文件
#include <pcl/filters/project_inliers.h> //投影滤波类头文件
int
main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_projected(new pcl::PointCloud<pcl::PointXYZ>);
//创建点云并打印出来
cloud->width = 5;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
{
cloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
}
std::cerr << "Cloud before projection: " << std::endl;
for (size_t i = 0; i < cloud->points.size(); ++i)
std::cerr << " " << cloud->points[i].x << " "
<< cloud->points[i].y << " "
<< cloud->points[i].z << std::endl;
// 填充ModelCoefficients的值,使用ax+by+cz+d=0平面模型,其中 a=b=d=0,c=1 也就是X——Y平面
//定义模型系数对象,并填充对应的数据
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients());
coefficients->values.resize(4);
coefficients->values[0] = coefficients->values[1] = 0;
coefficients->values[2] = 1.0;
coefficients->values[3] = 0;
// 创建ProjectInliers对象,使用ModelCoefficients作为投影对象的模型参数
pcl::ProjectInliers<pcl::PointXYZ> proj; //创建投影滤波对象
proj.setModelType(pcl::SACMODEL_PLANE); //设置对象对应的投影模型
proj.setInputCloud(cloud); //设置输入点云
proj.setModelCoefficients(coefficients); //设置模型对应的系数
proj.filter(*cloud_projected); //投影结果存储cloud_projected
std::cerr << "Cloud after projection: " << std::endl;
for (size_t i = 0; i < cloud_projected->points.size(); ++i)
std::cerr << " " << cloud_projected->points[i].x << " "
<< cloud_projected->points[i].y << " "
<< cloud_projected->points[i].z << std::endl;
system("pause");
return (0);
}
运行结果如下:
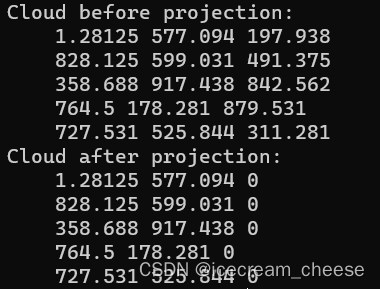
程序的功能也主要就是将三维的点投影到二维xy平面上。
CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(project_inliers)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (project_inliers project_inliers.cpp)
target_link_libraries (project_inliers ${PCL_LIBRARIES})
文章来源:https://blog.csdn.net/aizzl97/article/details/135823751
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 人大女王金融硕士项目:未来属于那些相信梦想,并愿意为之付诸行动的人
- 和芯星通的UM982产品性能情况
- 台达PLC使用RS485Modbus指令通信
- 【Unity】GPU骨骼动画 渲染性能开挂 动画合批渲染 支持武器挂载
- 【docker】如何编写dockerfile文件,构建docker镜像
- 基于JavaWeb+SSM+Vue基于微信小程序的在线投稿系统的设计和实现
- arduino+oled显示器显示中文显示温度湿度
- 毕设选题应当注意什么-如何选题-附相关解决案例资料
- Python字符串
- 【面试】Java最新面试题资深开发-Java中的垃圾回收机制