发布与订阅 geometry_msgs::PoseArray 的消息主题 PoseArrayConstPtr & msg_p 不弹出属性
发布时间:2024年01月24日
1.问题
分析? 发布 geometry_msgs::PoseArray 消息理论是和其它类型应当没有区别?
那么有什么搞的吗?
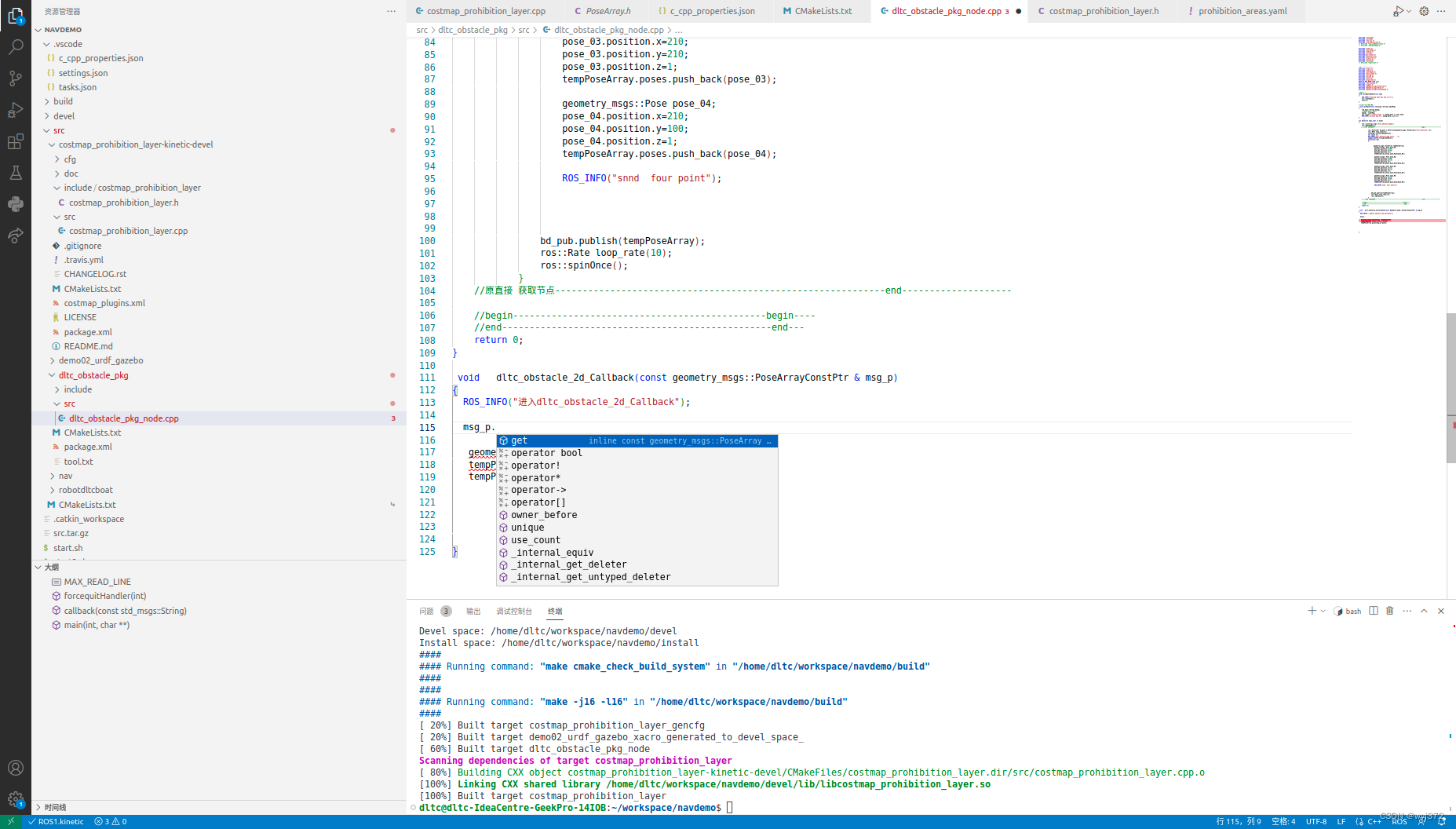
? 问题 关键是 callback(const geometry_msgs::PoseArrayConstPtr& msg_p) 中msg_p 怎么打都不弹出 方法和属性?
2.过程
头文件
#include "geometry_msgs/PoseArray.h"
#include "geometry_msgs/PoseStamped.h"
#include "geometry_msgs/Point.h" ros::NodeHandle nh("~/" + name_);
current_ = true;
dltc_obstacle_sub =nh.subscribe<geometry_msgs::PoseArray>( "/dltc_obstacle",10,dltc_obstacle_2d_Callback); //动力天成障碍物主韪订阅订阅的
void CostmapProhibitionLayer::dltc_obstacle_2d_Callback(const geometry_msgs::PoseArrayConstPtr& msg_p)
{
ROS_INFO("进入dltc_obstacle_2d_Callback");
geometry_msgs::PoseArray tempPoseArray;
tempPoseArray.header=msg_p->header;
tempPoseArray.poses=msg_p->poses;
}3.总结
???? 个人理解 认为
1. geometry_msgs::PoseArray 与 geometry_msgs::Pose? geometry_msgs::PoseStamped的区别在于他们是一个对象,而前面是一个数组
2.但是我们经常使用的是geometry_msgs::Pose? geometry_msgs::PoseStamped 这种对象的
? 突然有一个数组的没有反应过来,应当用“ -> ”? 而不是 “.”点
3.ros 慢慢熟悉以后正在快速写代码突然一下没有反应过来,特此备注,备忘同时希望能提醒到正在使用的其它兄弟
文章来源:https://blog.csdn.net/wyj372/article/details/135821609
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 基于X射线无损检测的高分辨率 PCBA板焊点缺陷检测系统
- 【Java并发】聊聊concurrentHashMap的put核心流程
- mybatis分页、延迟加载、立即加载、一级缓存、二级缓存
- 人工智慧时代创业思维如何驱动企业创新
- Arcgis像元统计数据
- 代码随想录算法训练营第41天|343. 整数拆分 96.不同的二叉搜索树
- V?: Guided Visual Search as a Core Mechanism in Multimodal LLMs
- 爬虫-4-数据提取-json,jsonpath,正则
- 73应急响应-Web分析php&javaWeb&自动化工具
- SpringCloud OpenFegin 传递Date类型的参数时,接收端多出14个小时的问题