(ros2)gazebo中显示机器人模型最小系统
发布时间:2024年01月03日
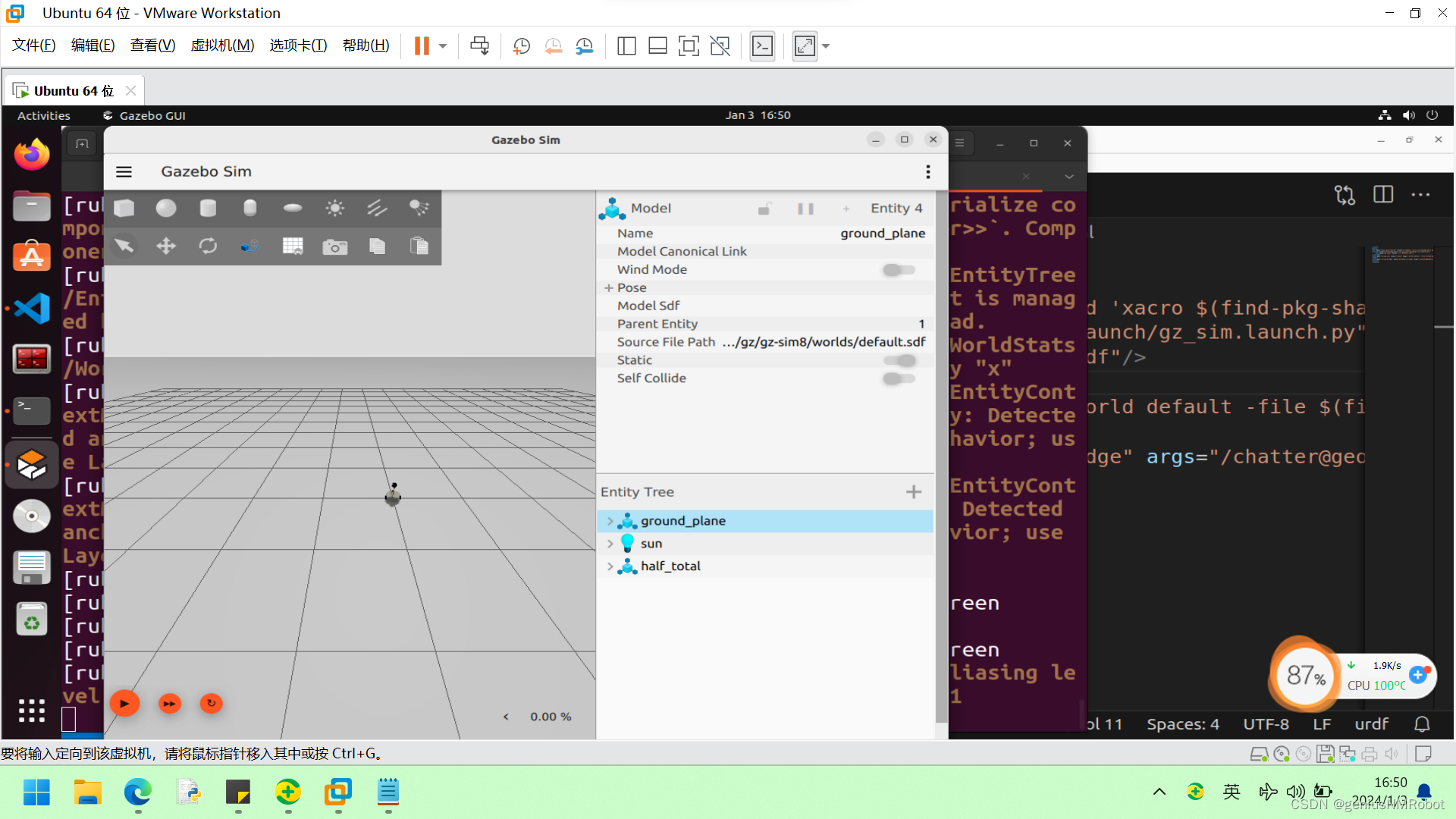
<launch>
<group>
<let name="robot_description" value="$(command 'xacro $(find-pkg-share gazebo_pkg)/urdf/total.xacro')"/>
<include file="$(find-pkg-share ros_gz_sim)/launch/gz_sim.launch.py">
<arg name="gz_args" value="-v 4 default.sdf"/>
</include>
<node pkg="ros_gz_sim" exec="create" args="-world default -file $(find-pkg-share gazebo_pkg)/urdf/total.urdf">
</node>
</group>
</launch>?只需要urdf文件和sdf文件就可以了,不用每次把urdf转换为sdf
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135367897
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!