【正点原子】STM32电机应用控制学习笔记——2.直流无刷电机基础知识
一.直流无刷电机简介(了解)
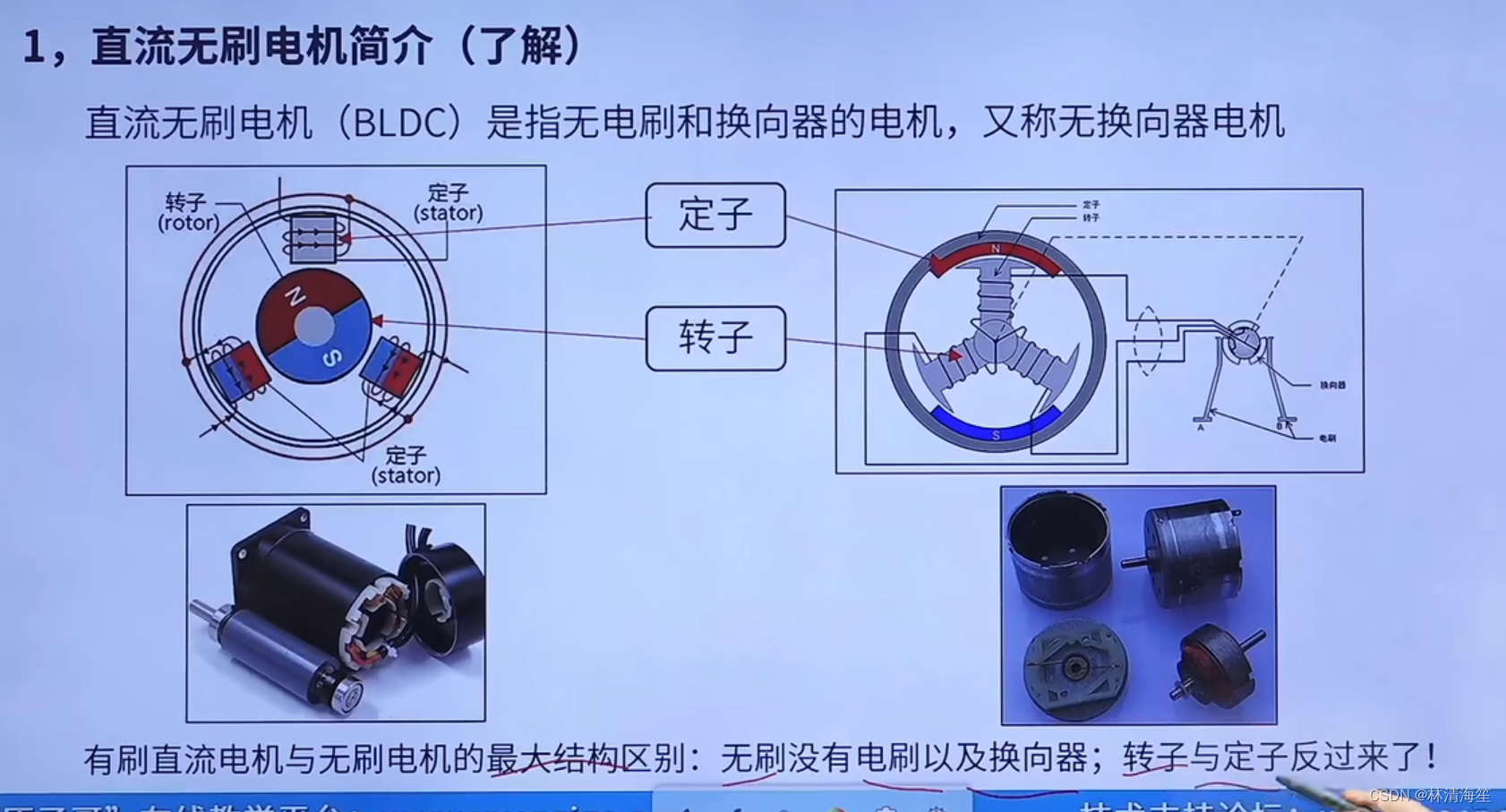
1.简介
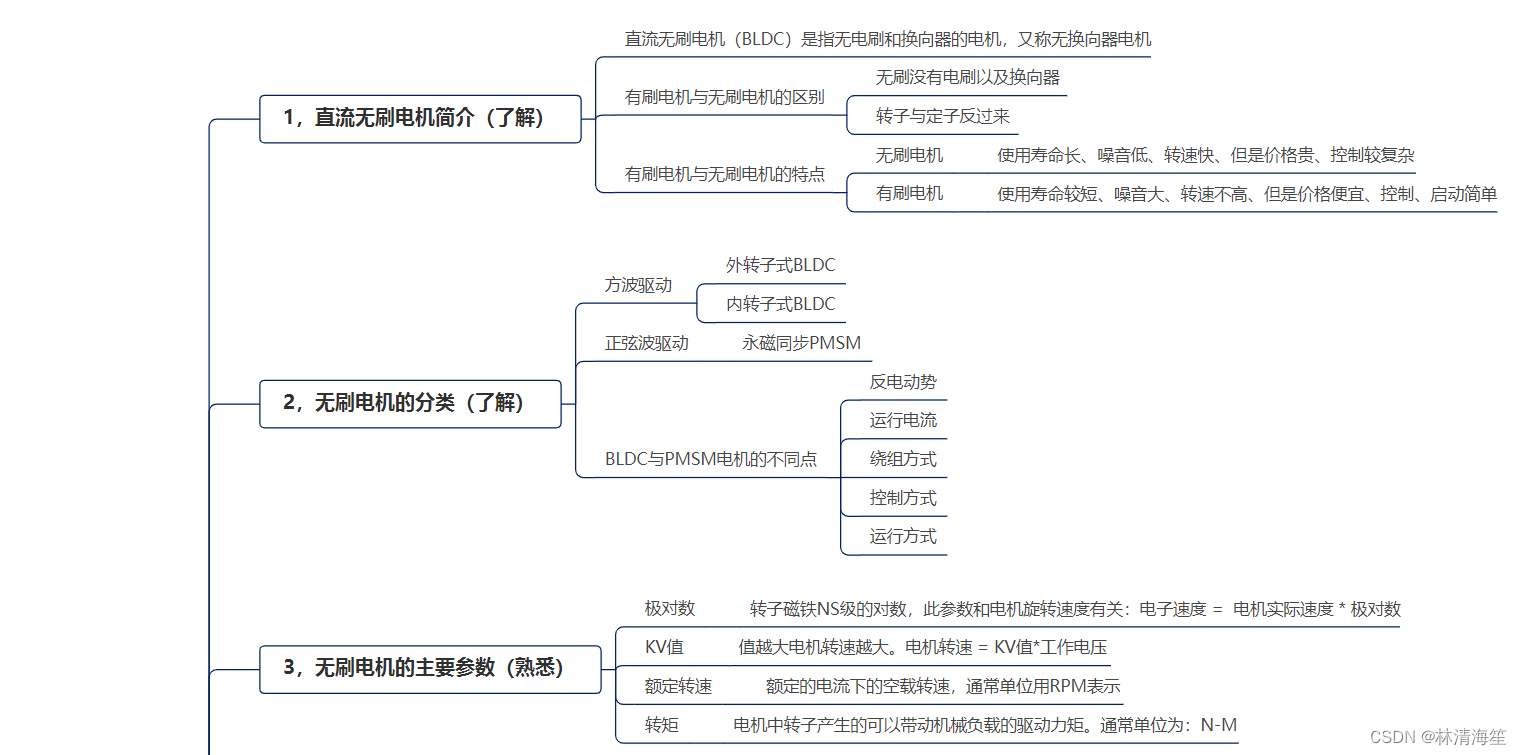
没有电刷,无换向器的电机,也称为无换向器电机。

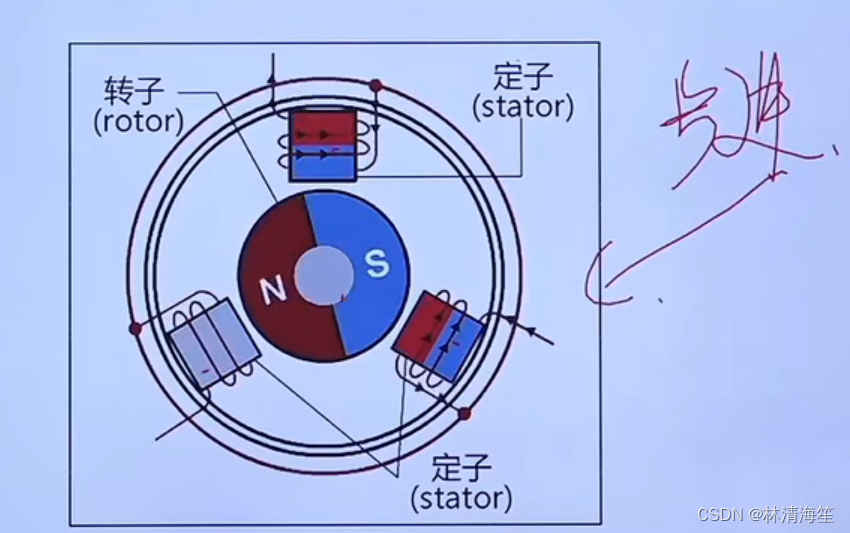
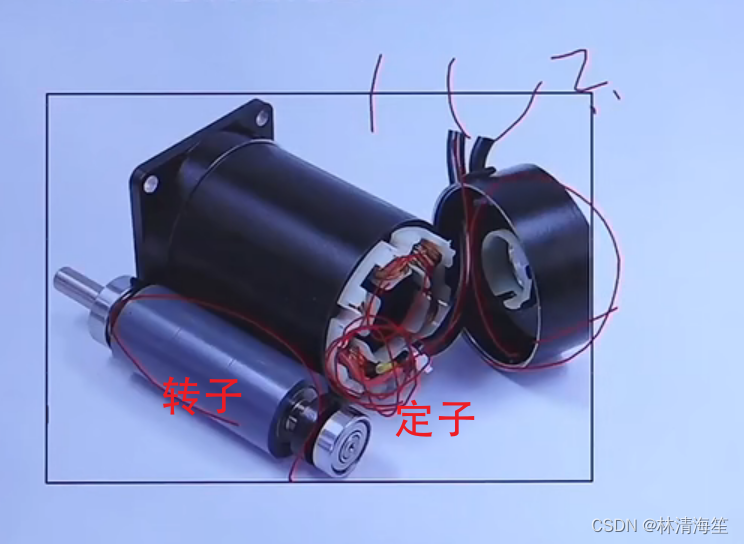
2.结构
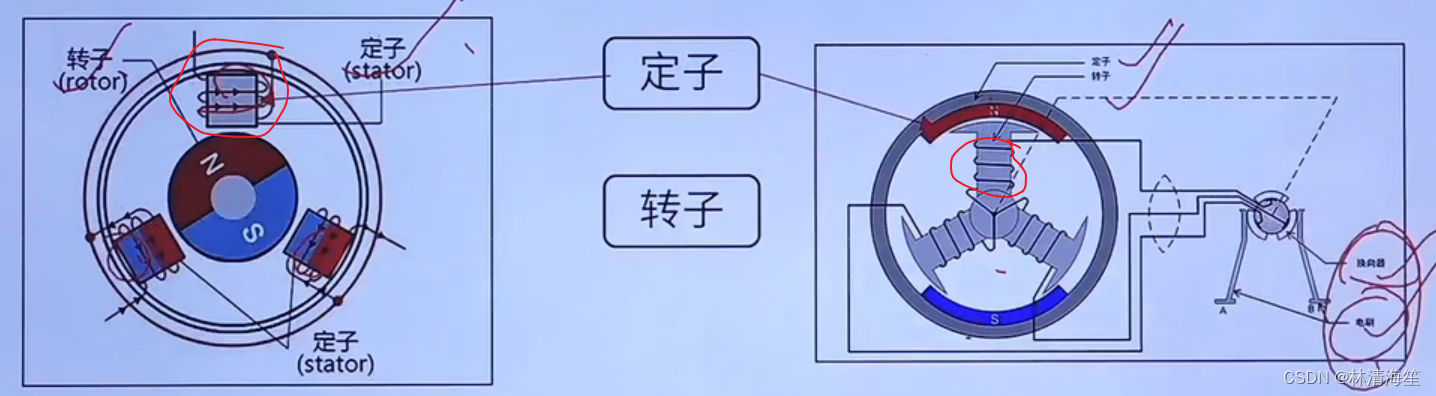
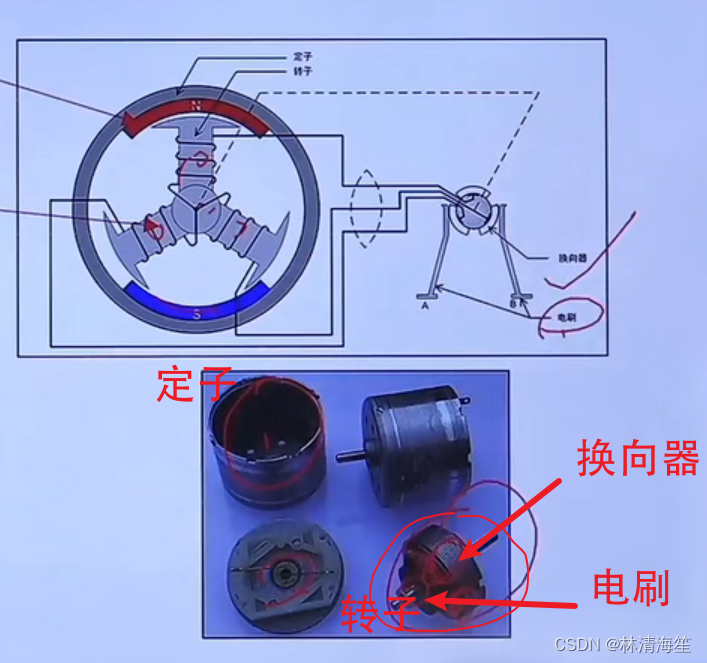
主要是定子和转子,而直流有刷电机多的是换向器和电刷。

而直流有刷的定子是N和S的永磁体,而无刷是三个线圈饶阻。
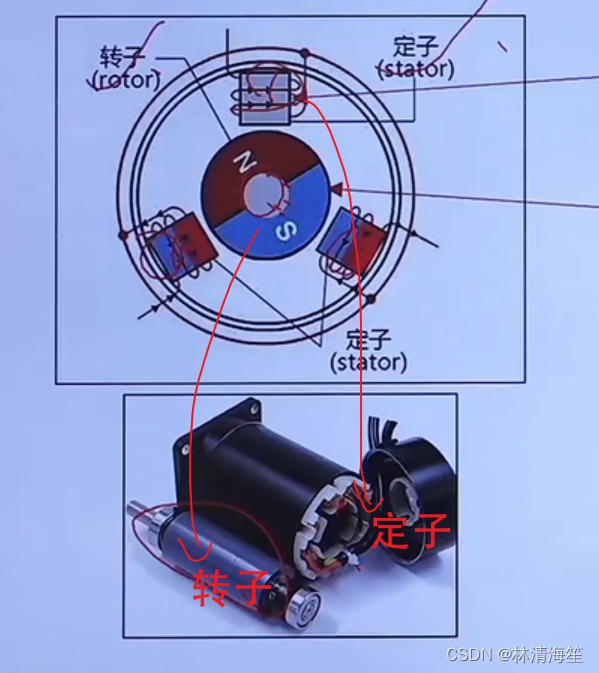
直流有刷是定子是饶阻,无刷的定子是N和S的永磁体。两者的转子和定子恰好是相反的。也是他们最大的结构区别。
对应实物图,
3.有刷和无刷各自特点
有刷电机使用寿命较短,因为有碳刷,其与换向器之间经常有摩擦,就会有物理损耗。控制简单,给个电压就能转起来。
无刷电机没有碳刷,所以没有物理磨损,寿命会更长,噪音低,转速也较快。但是价格比较贵,控制也较为复杂。

4. 无刷电机运转过程
跟步进电机类似,通过饶阻的交替转变,吸引永磁体,转子跟随旋转。所以归根结底,步进电机也算是无刷电机的一种。
所以他俩都有可能出现丢步的情况。就是因为饶阻变化得太快了,里面的转子还没跟上,就会发生抖动,丢步的现象,但是无刷电机通常会有位置传感器,它是可以检测转子的位置。就算没有传感器,也可以通过反电动势来判断转子当前的位置状态。还有我们可以通过增大线圈饶阻的电压和电流来改善丢步的现象。

二.无刷电机的分类(了解)
1.分类
主要以驱动方式来进行区分,有两种,第一种是方波驱动,第二种为正弦波驱动。
方波驱动分为两种,分为外转子式和内转子式。正弦波主要驱动PMSM永磁同步电机。
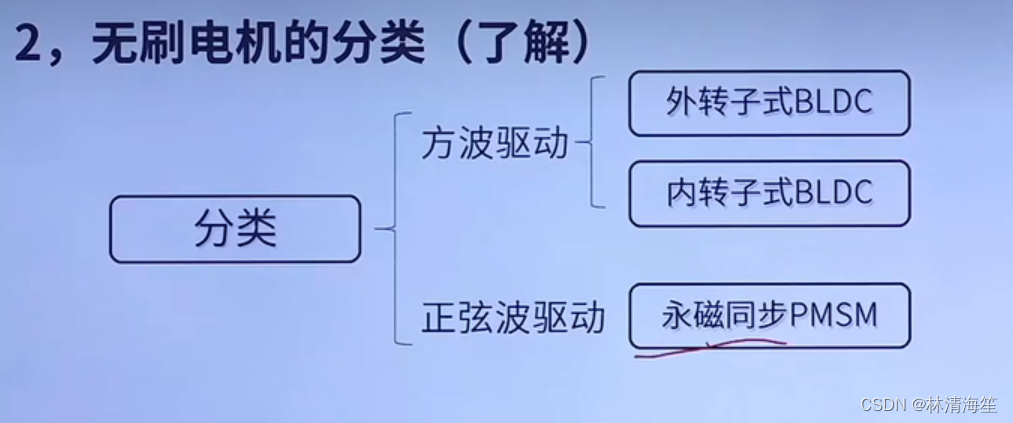
但从外表看内转子式BLDC和永磁同步PMSM是很难看出区别的,还是得拆掉外壳看内部线圈的饶阻方式,BLDC是集中式饶阻,而PMSM是短剧分布式饶阻。

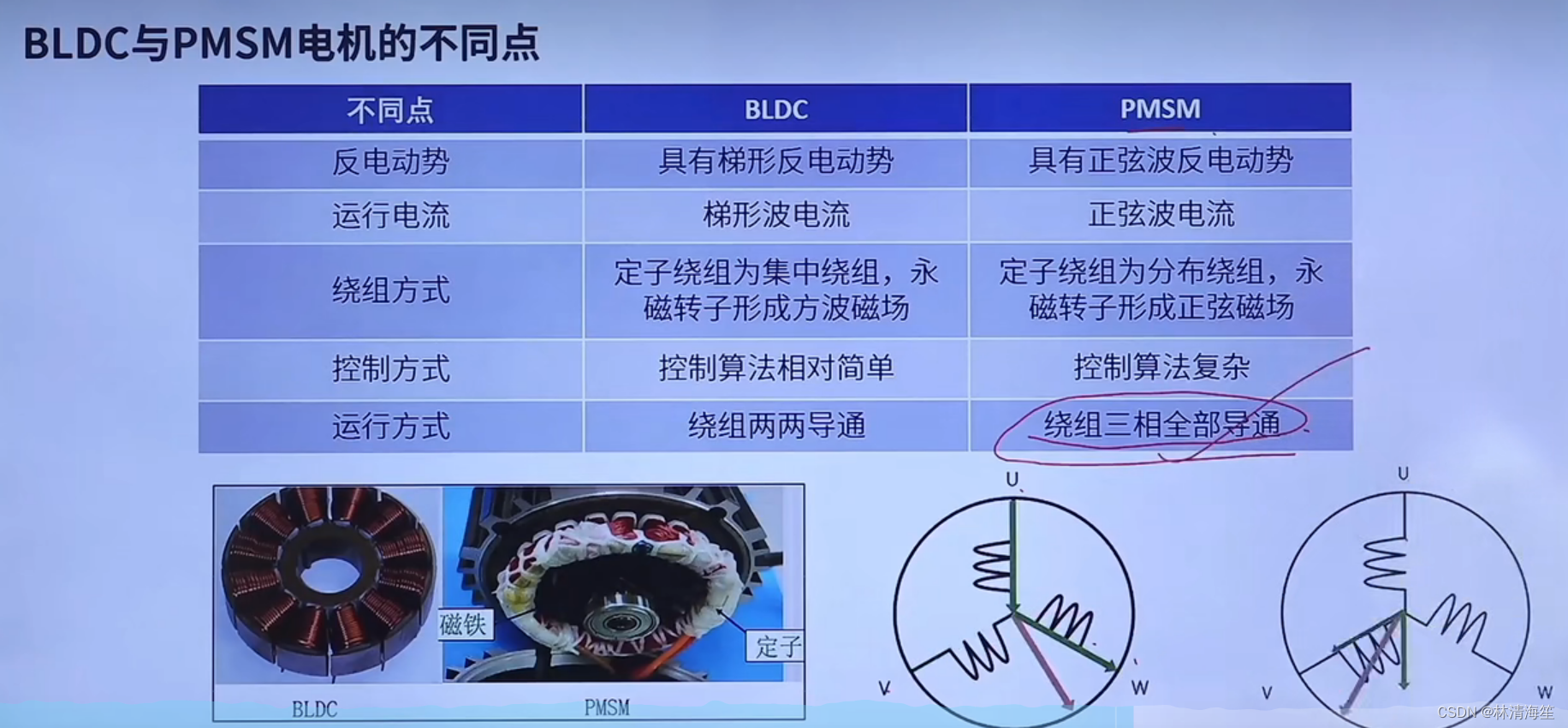
2.BLDC与PMSM电机的不同的
最大区别是,BLDC的反电动势和运行电流都是梯形(即方波),而PMSM是正弦波。

BLDC是集中式饶阻,PMSM的定子饶阻是分布式饶阻,
BLDC的控制算法相对简单,使用6步换向,而PMSM通常使用FOC矢量控制,更为复杂。
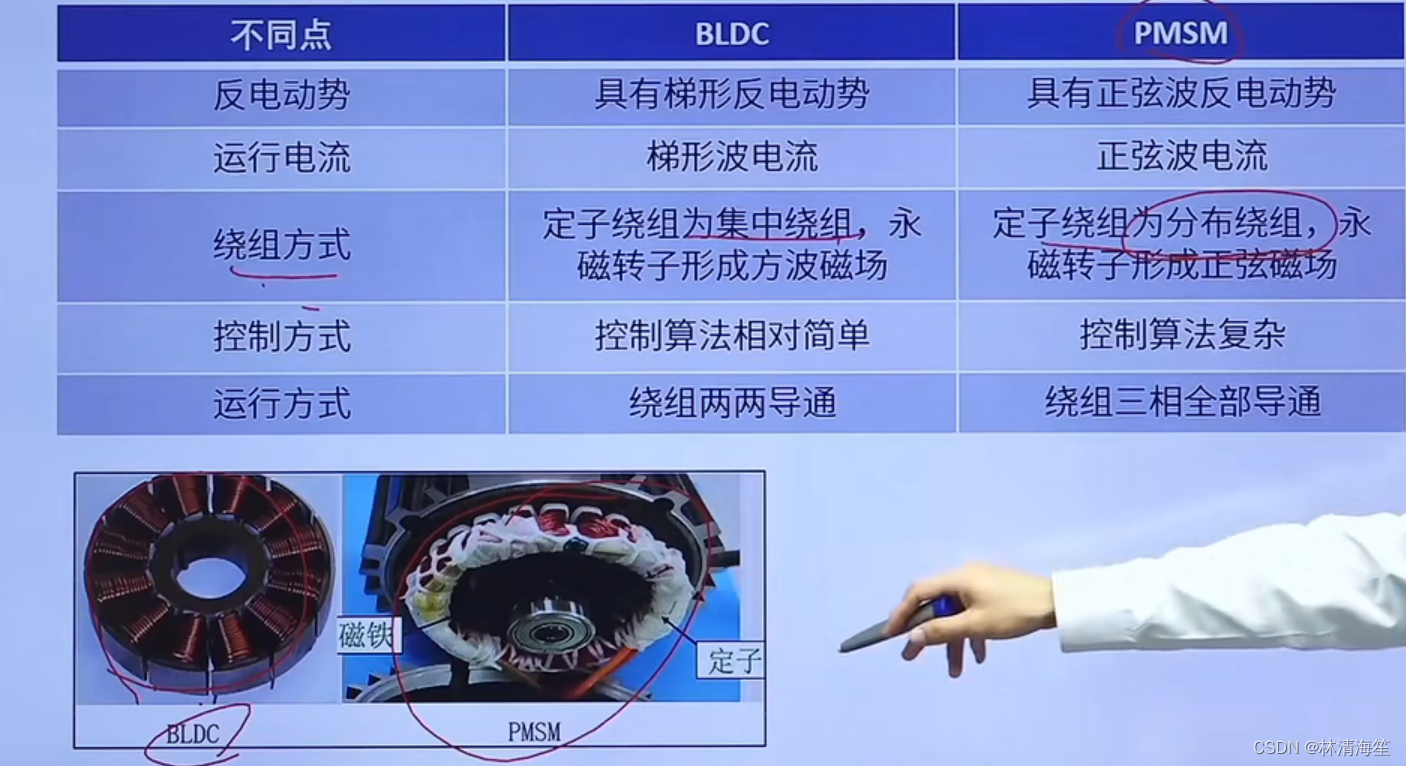
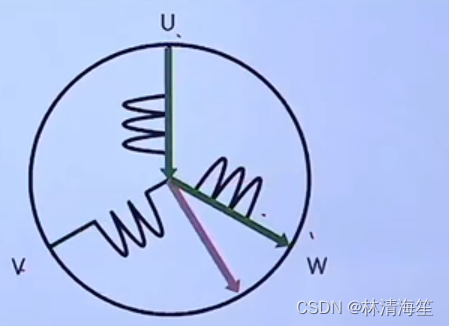
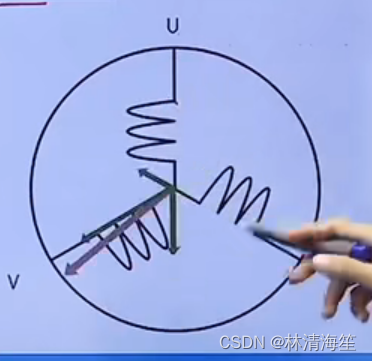
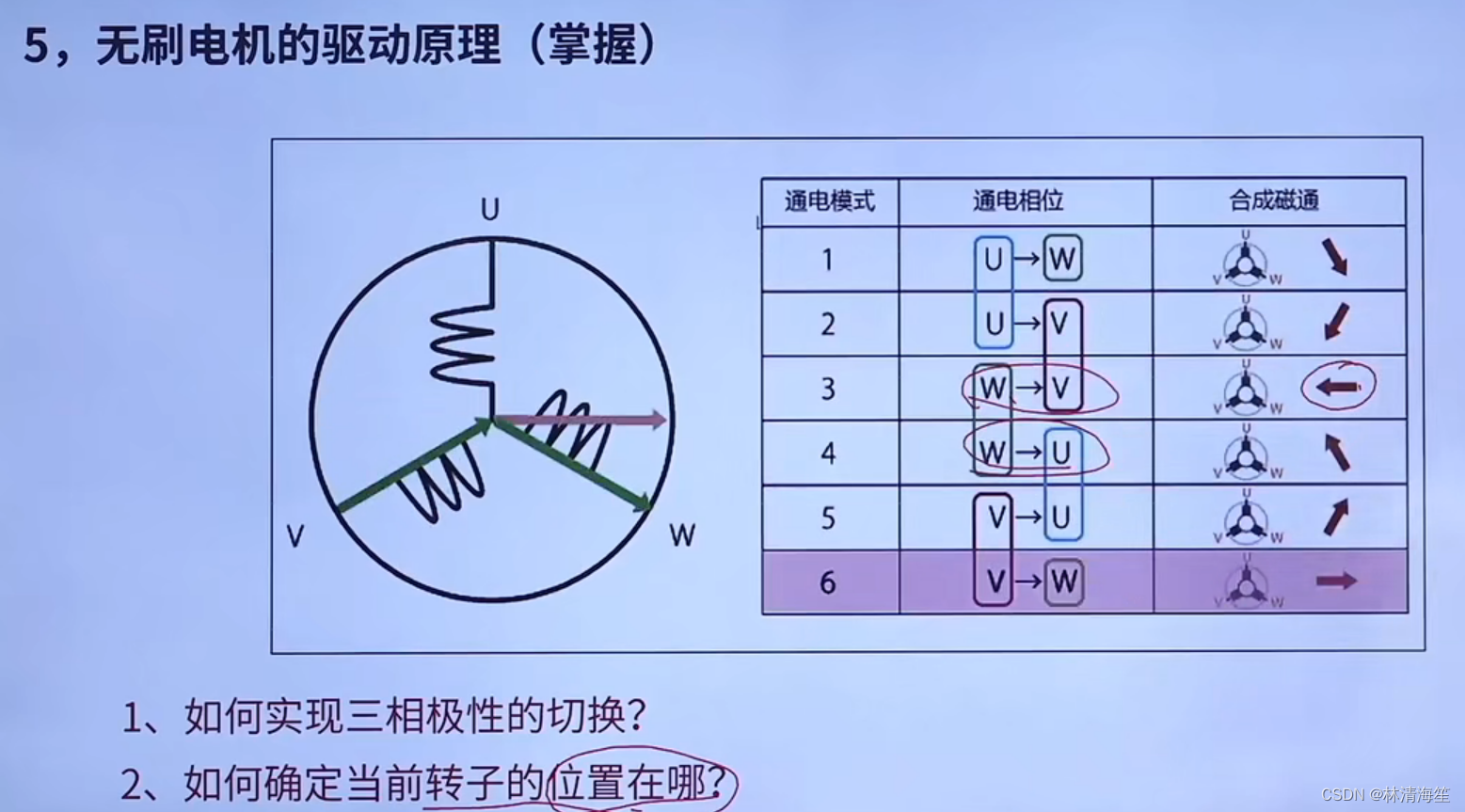
BLDC饶阻两两导通,像无刷电机通常由三向(uvw),两两导通指要么uv通,要么uw,要么vw导通,看下图的绿色线表示导通,红色表示磁场的矢量方向,即转子的旋转方向。磁场方向每转动60度,转动一相。所以称其为6步换向。

而PMSM是三相全部导通,就是uvw三相全部导通,所以转动的时候转子是非常顺滑的,而不像BLDS具有局限性,60度60度的转动。所以PMSM难度更加大。
三.无刷电机的主要参数(熟悉)
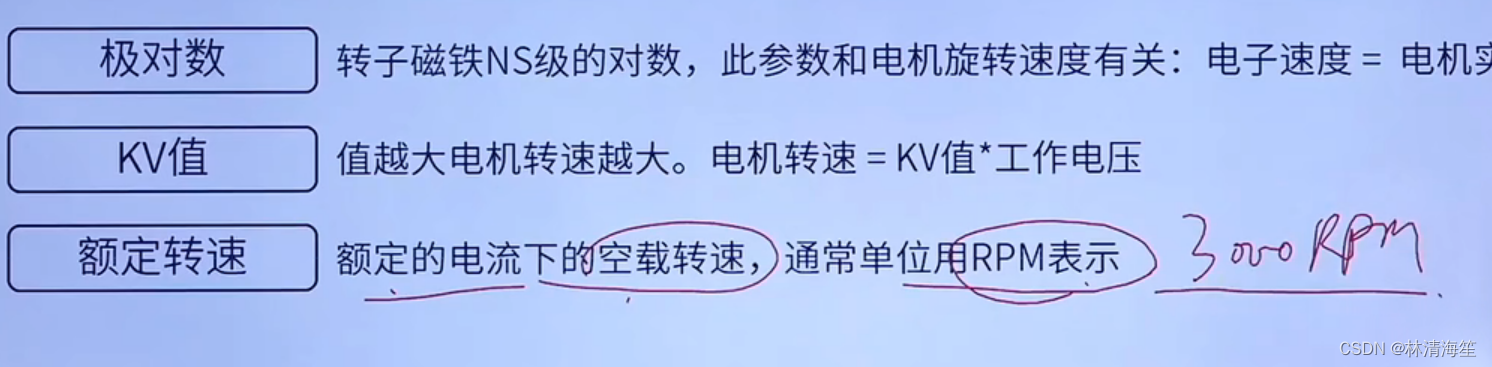
- 极对数就是转子磁铁NS级的对数。一个转子中含有一个N和S,则称为一对极,如果有两个N和S就是2对极。而这个对极是跟电机的旋转速度有关的。
那么根据公式,如果极对数越大,则对应电机实际速度越小。现在的无刷电机通常的转速都是比较快的,市场上的产品极对数都在4对极以下。
- KV值。在小型的无刷电机中见的比较多,kv值越大,对应电机转速越大。

- 额定转速。额定电流下的空载转速。3000RPM表示3000转每分钟。
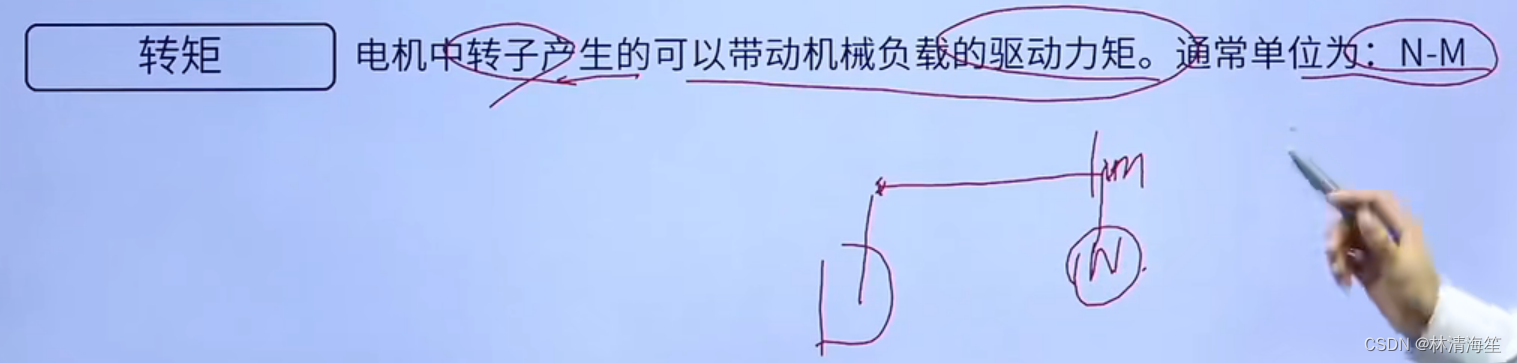
- 转矩:转子可以产生带动机械负载的驱动力矩。也就是一个电机,在离转轴1m处,能带动多大N的力。
四.应用场景(了解)
有刷电机相较于传统的无刷电机来说,优势是非常大的。首先在效率方面,无刷电机至少提高了20%左右,这是因为无刷电机是没有碳刷结构,没有物理损耗,维修次数较少,

五.无刷电机的驱动原理(掌握)
1.无刷电机结构
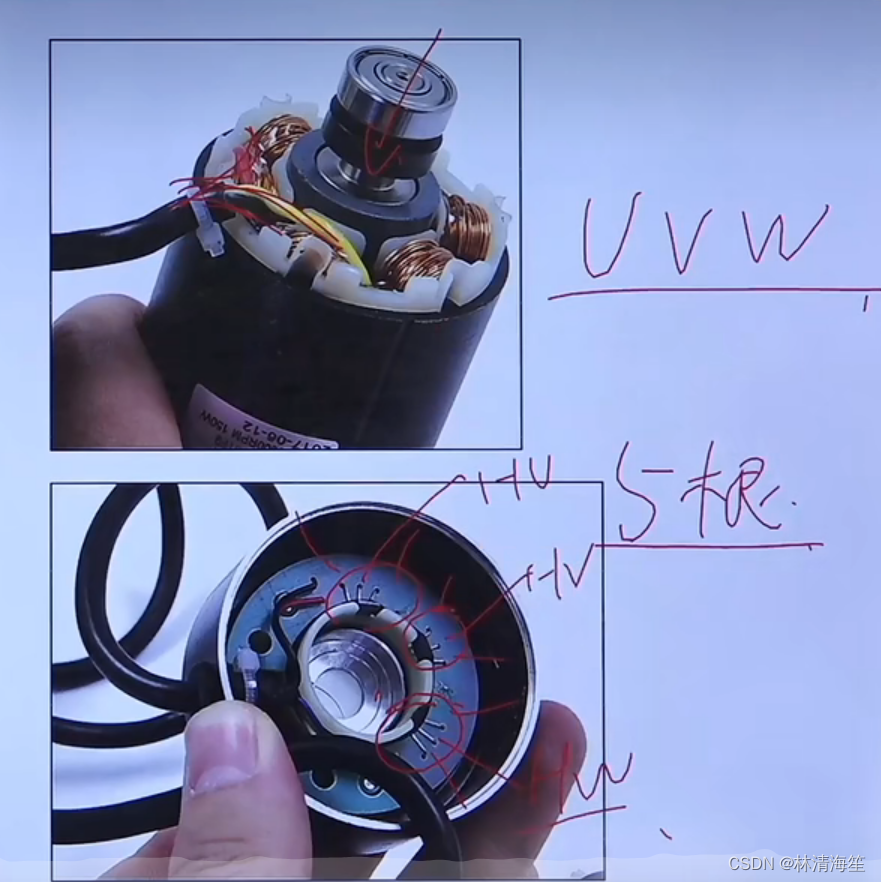
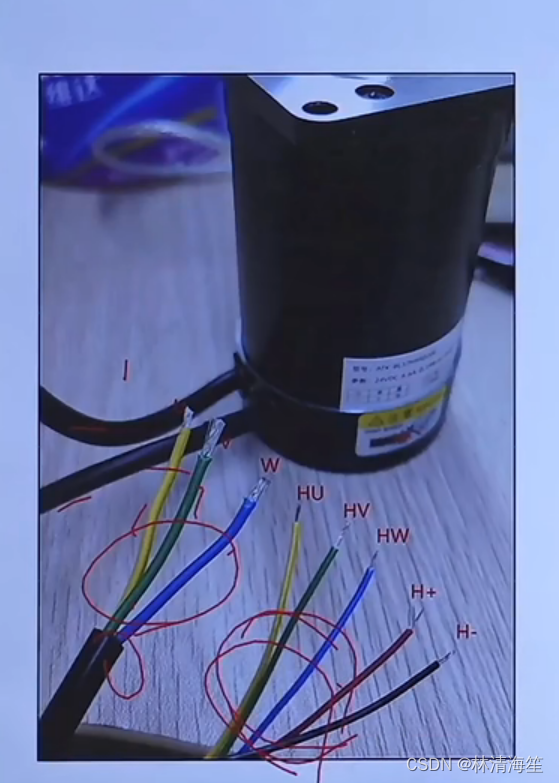
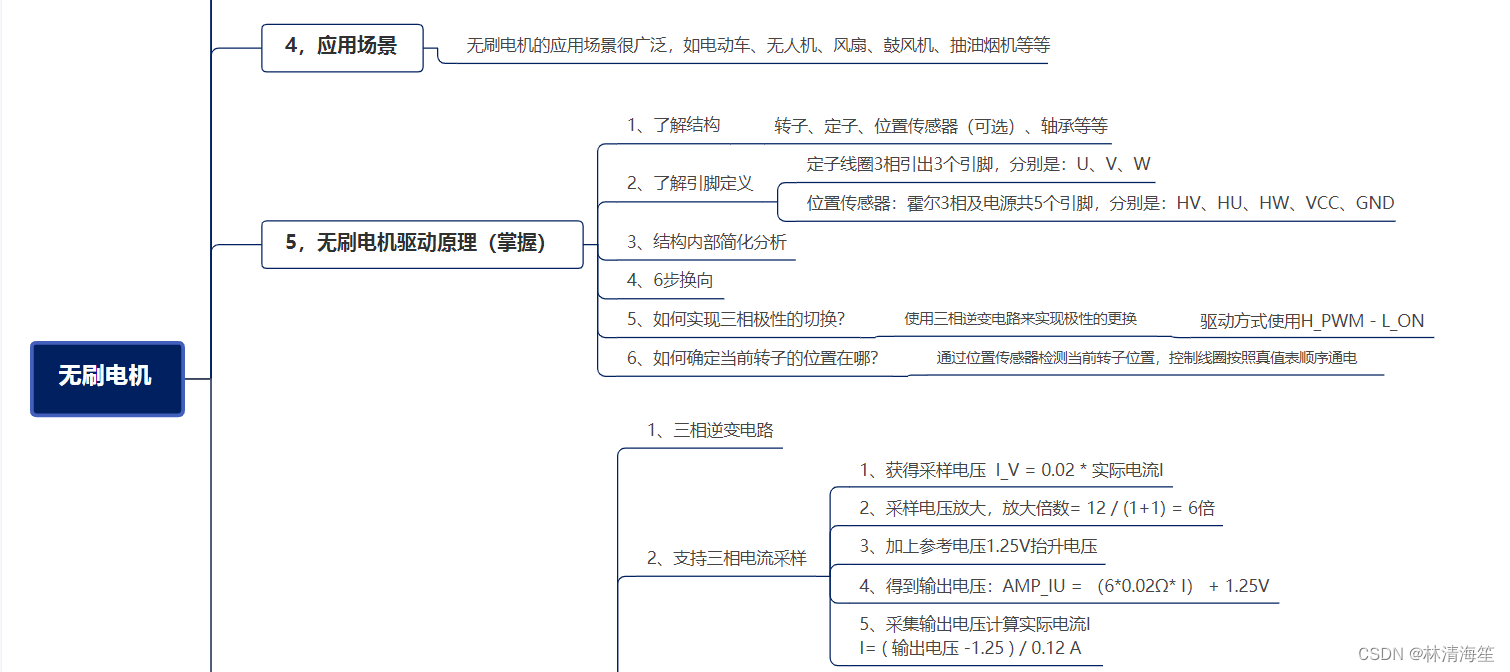
无刷电机主要是转子和定子,头上的壳引出两股很粗的线,第一股粗线是定子饶阻引出的三根线,通常三相就是有三根,五相就是五根,目前市场上用得比较多的是三相的无刷电机。第二股是位置传感器引出来的,
第一幅图的粗线印出来三根线,分别为uvw。第二幅图具有霍尔传感器,全部是引出了5根线,其中三根是霍尔输出,HU和HV和HW,加上他们各自的电源线GND和VCC。
2.引脚定义
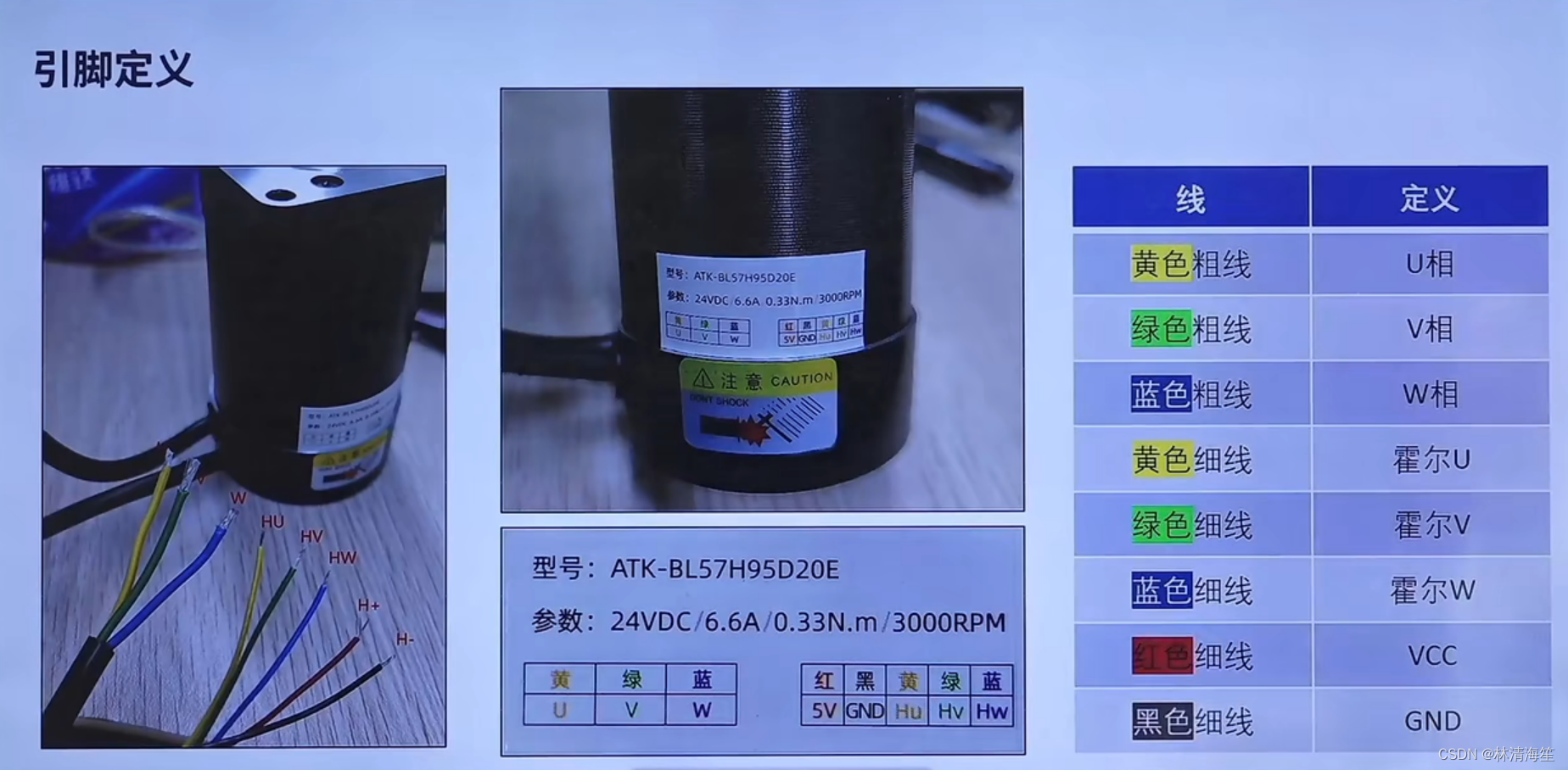
可以看到由于三根粗线和五根细线,三根粗线就是内部定子饶阻引出的粗线,五根细的是霍尔传感器的,
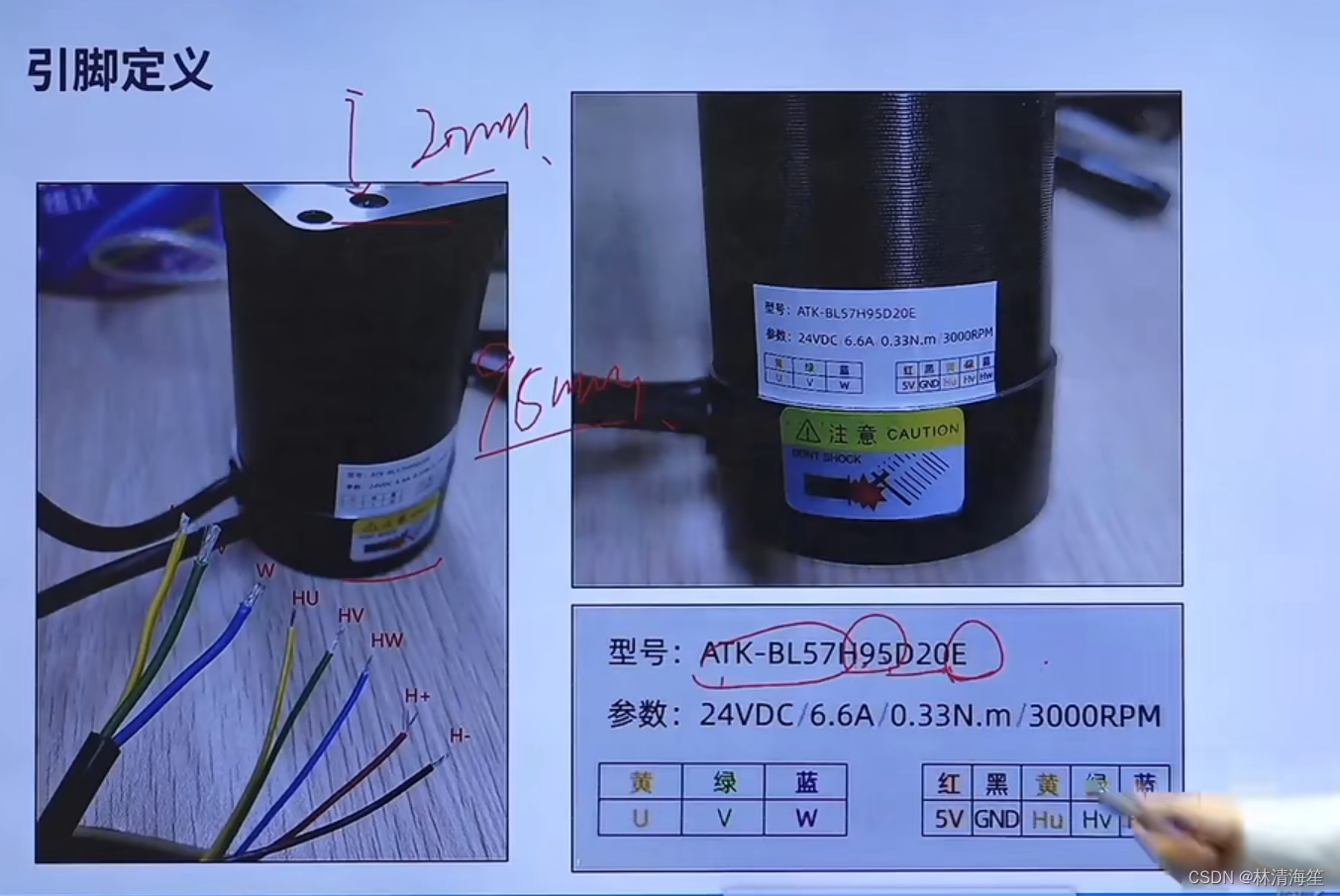
首先是型号是ATK-VL57,H95表示的是机身高95mm,D20表示转轴为20mm的高度,最后字母E表示带有位置传感器。
参数介绍:24v的额定直流电压,额定电流是2.2A,额定扭矩为0.33N·m,额定转速为3000RPM。
3.BLDC内部结构图
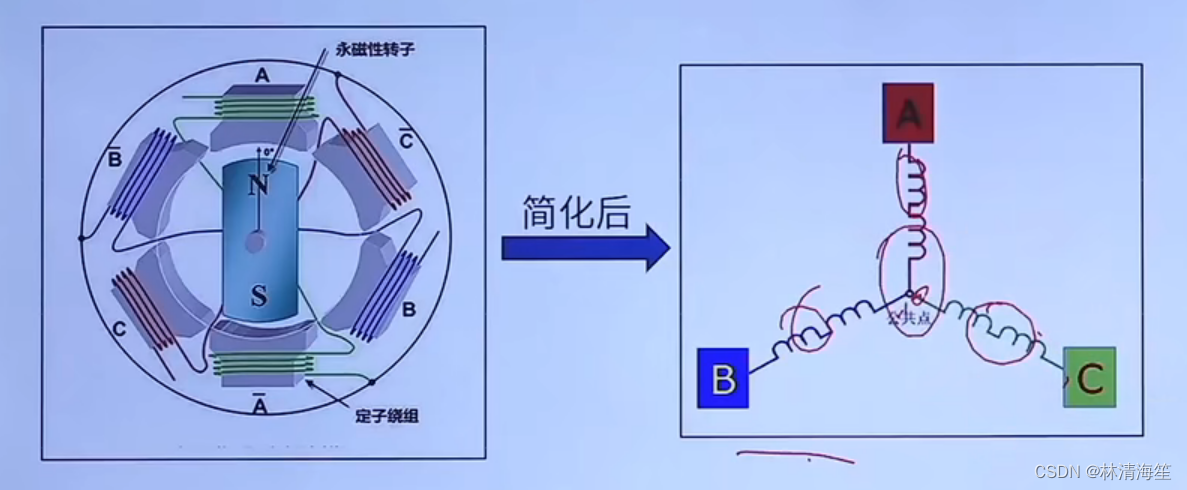
中间是转子,内圈黑子的是磁极,一共有8个磁极,所以有四个N和S,即有4个对极,除此之外还有很多的饶阻,但最后还是引出三根线,所以也是三相的,
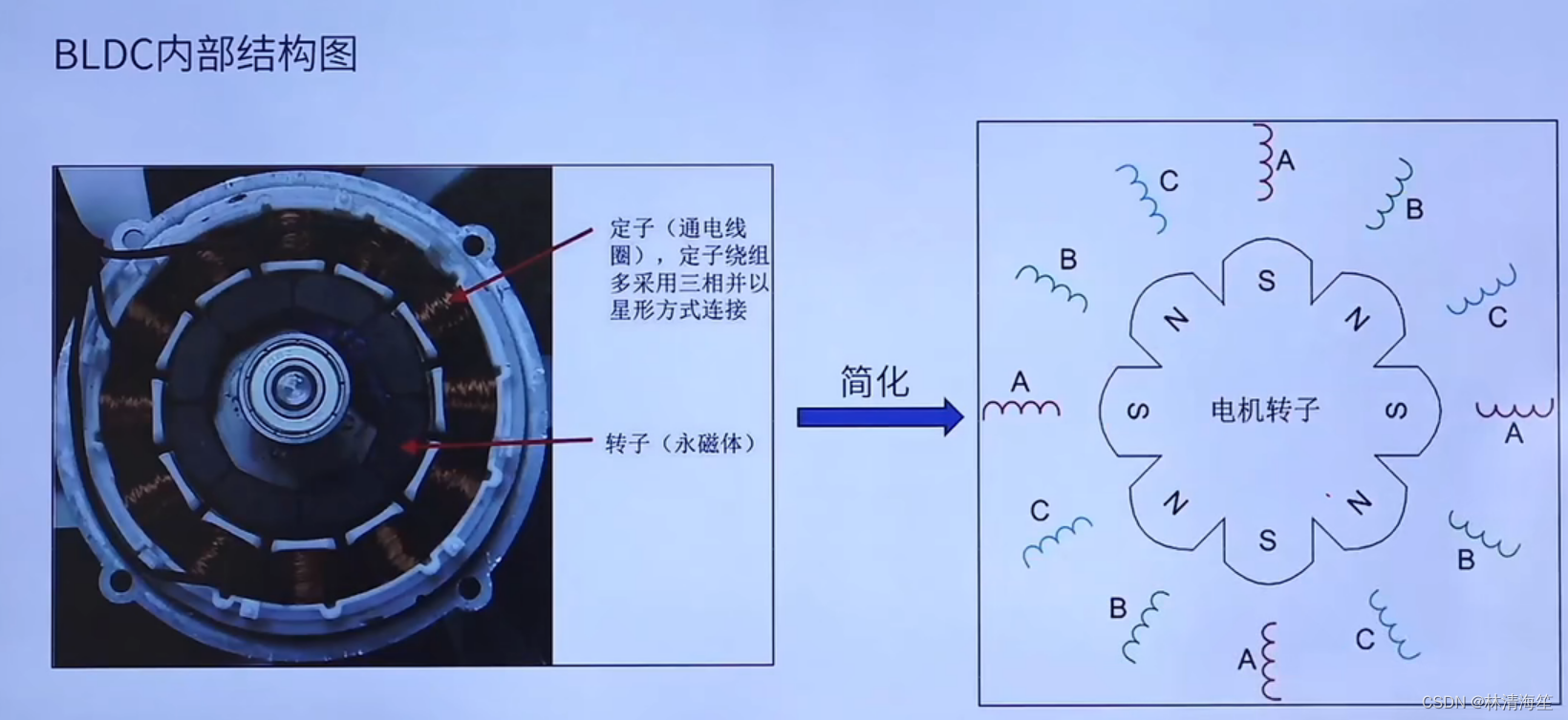
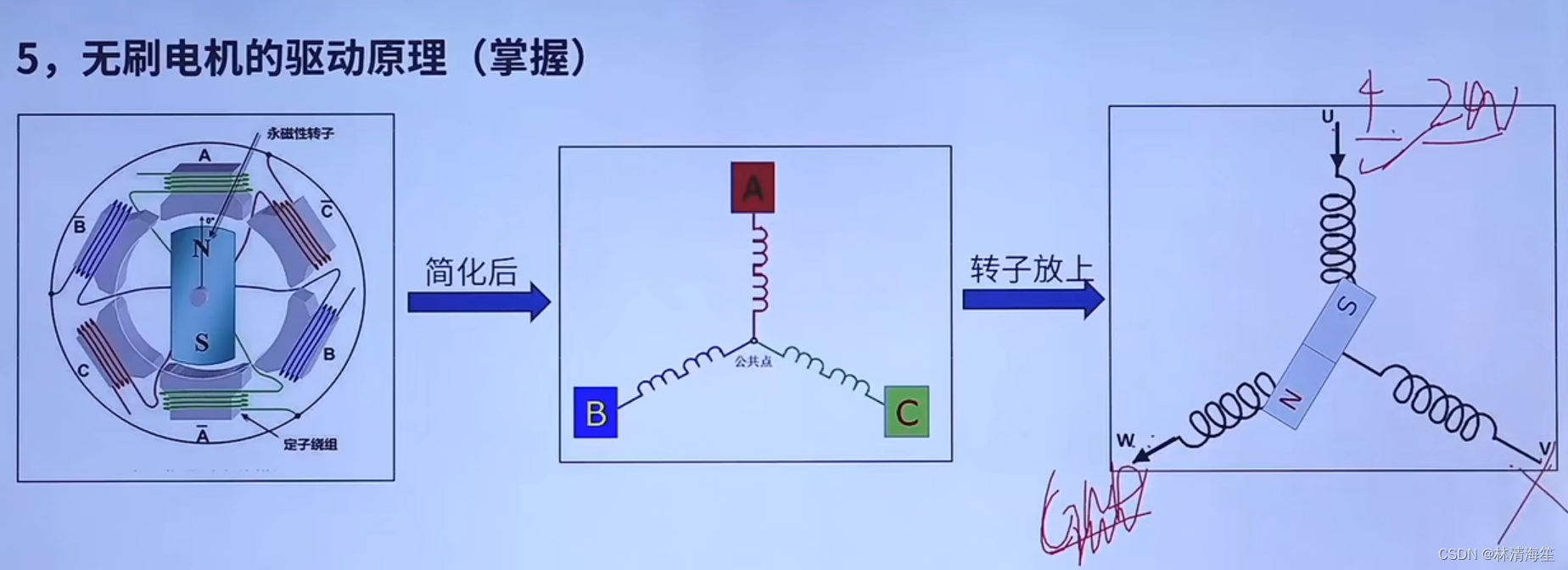
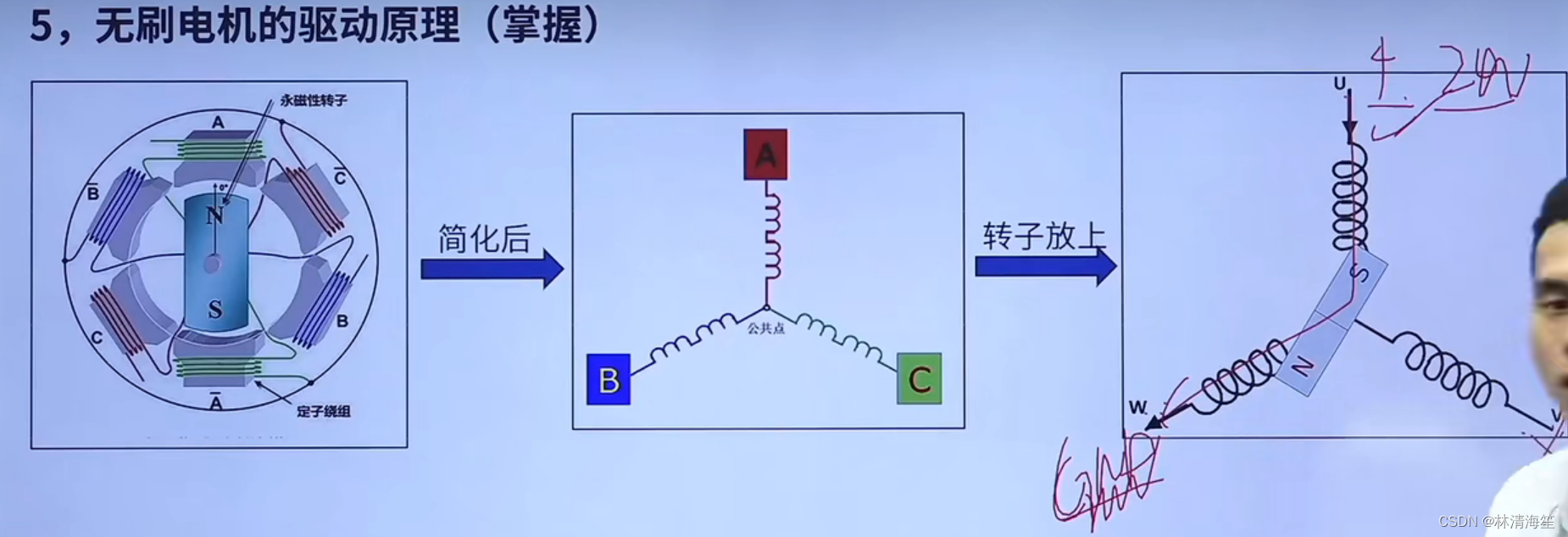
简化,线圈饶阻ABC,他们中间都有一个公共点,他们是连接在一起的,这种连接也被称为星形连接,然后把转子放上就能得到一个简化后的模型。
简化的模型中,U接24v,W接GND,V为开路不接。此时电流方向从U流向W。
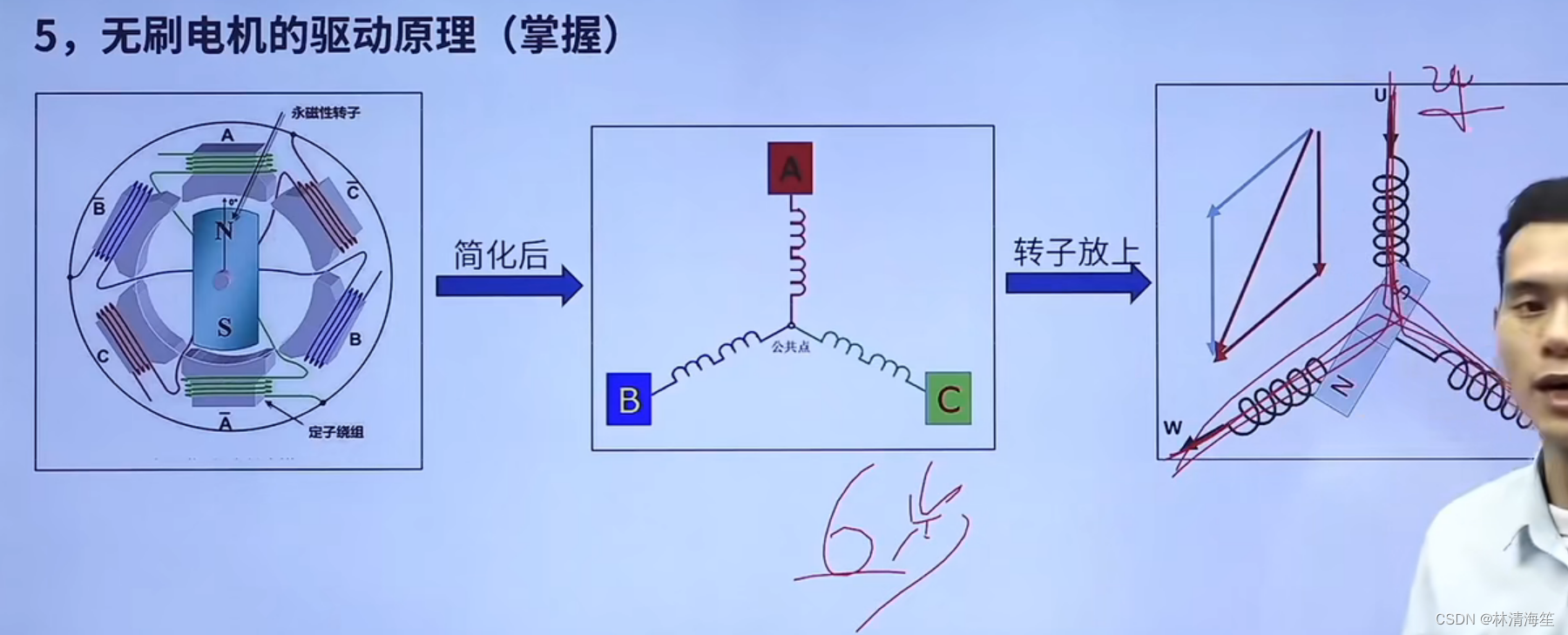
U相和V相的矢量方向,由平行四边形定则可得,就可以得到当前磁场的矢量方向,转子是跟磁场矢量方向是平行的。

由于BLDC转子饶阻是两两导通的,也就是同一时刻只有两相是导通的,另外一相是开路的。所以这样的组合就有六种,比如V正W负,V正U负等等。所以也称为六步换向。
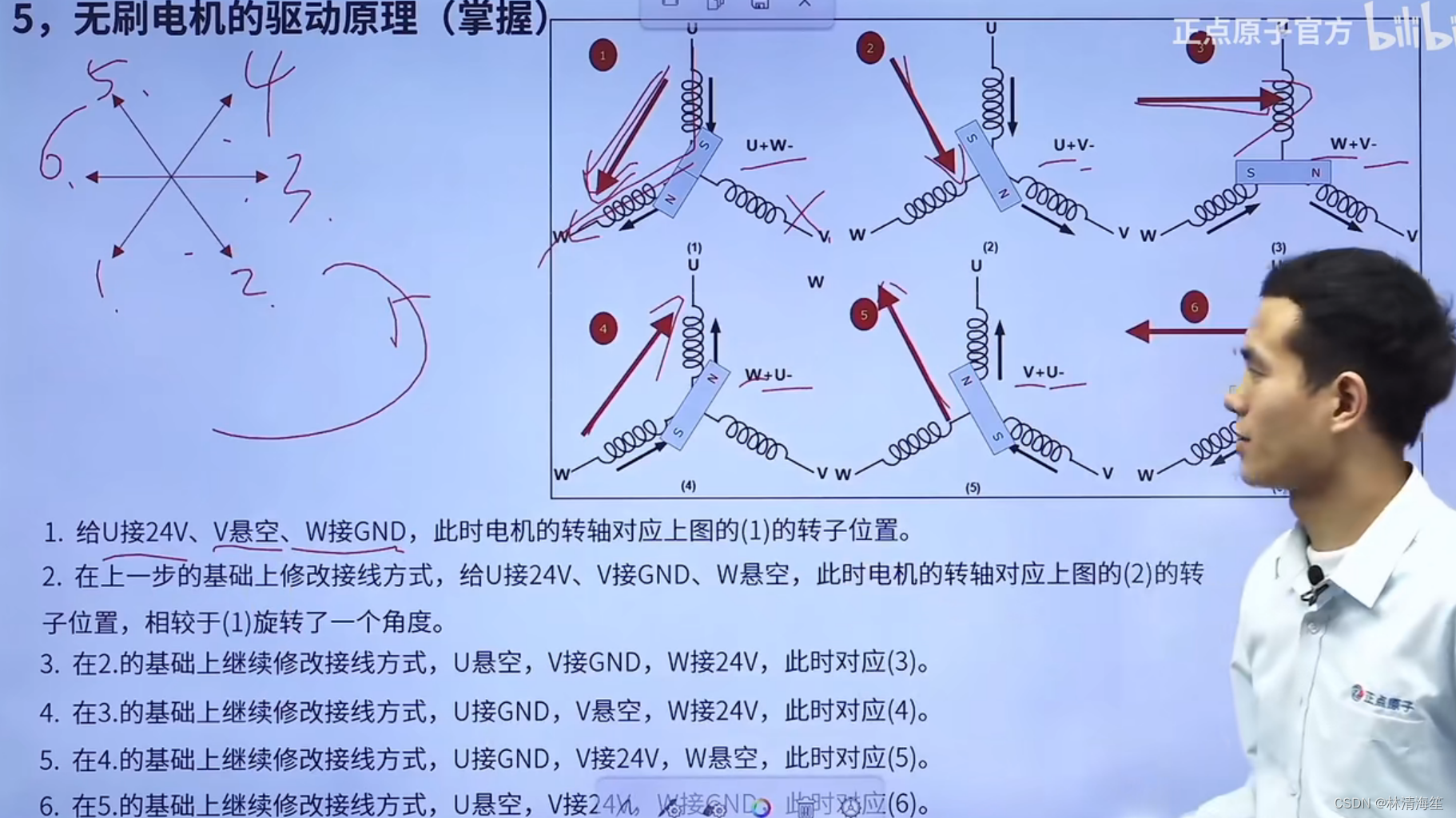
4.六步换向
第一步是U接正V悬空,w接负,磁场矢量方向是偏左下的。
走六步就走了一个周期了,而且是逆时针方向,如果想要顺时针,那么就将导通顺序反过来,654321导通。
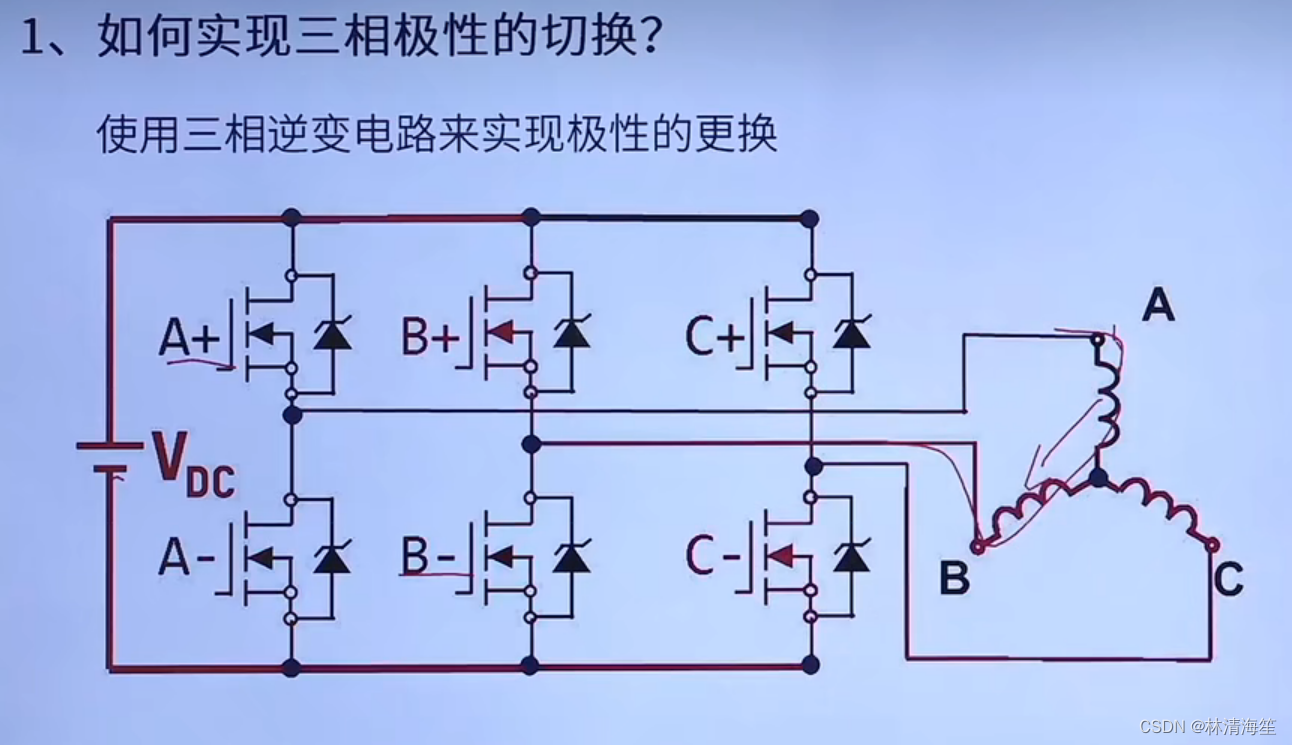
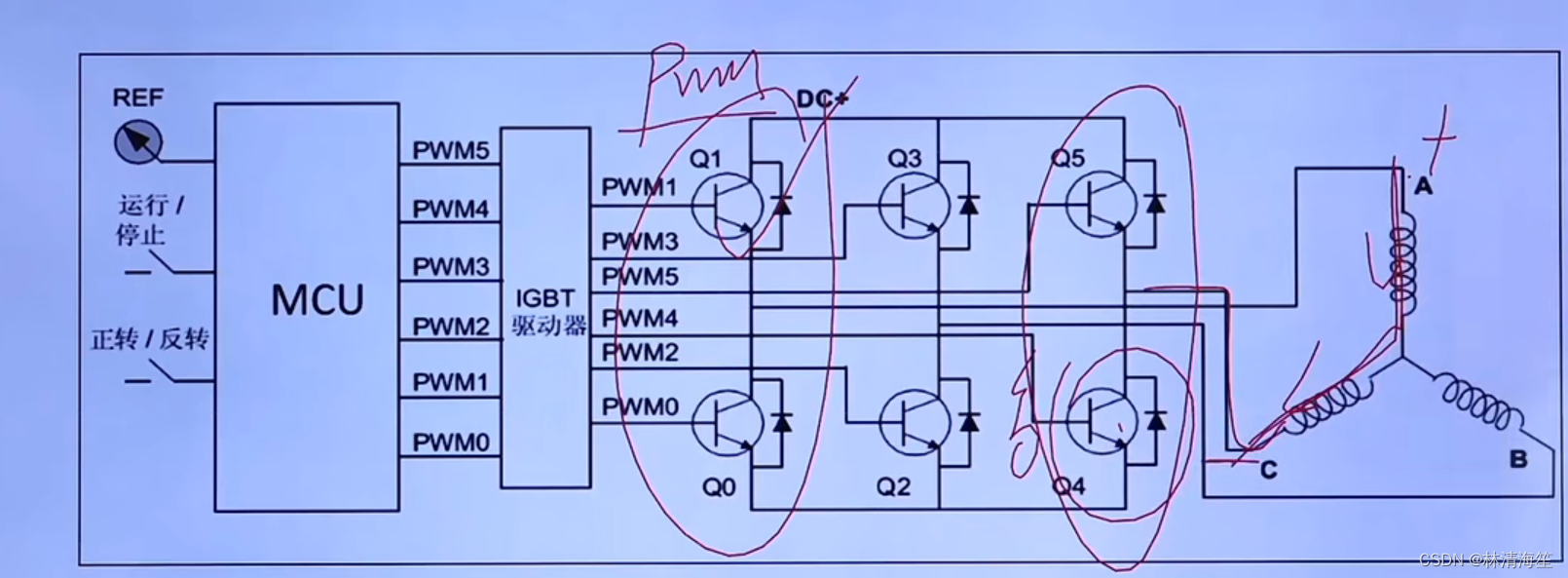
(1)如何实现三相极性的切换
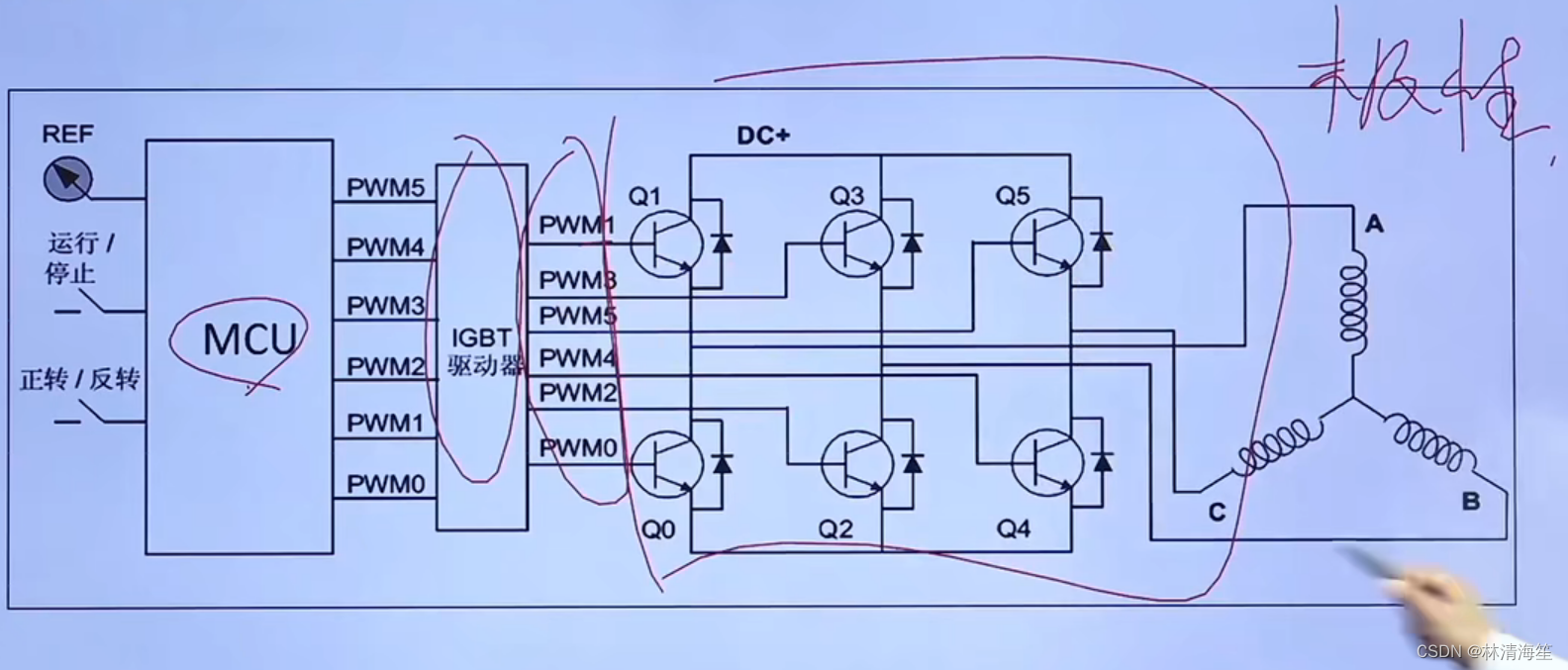
在这里使用三相逆变电路来完成极性的更换,使用了三个半桥,使用了高功率的mos管来工作。
首先A相是通过A半桥进行控制,通过看是对A+还是对A-接正来进行对A相的导通。
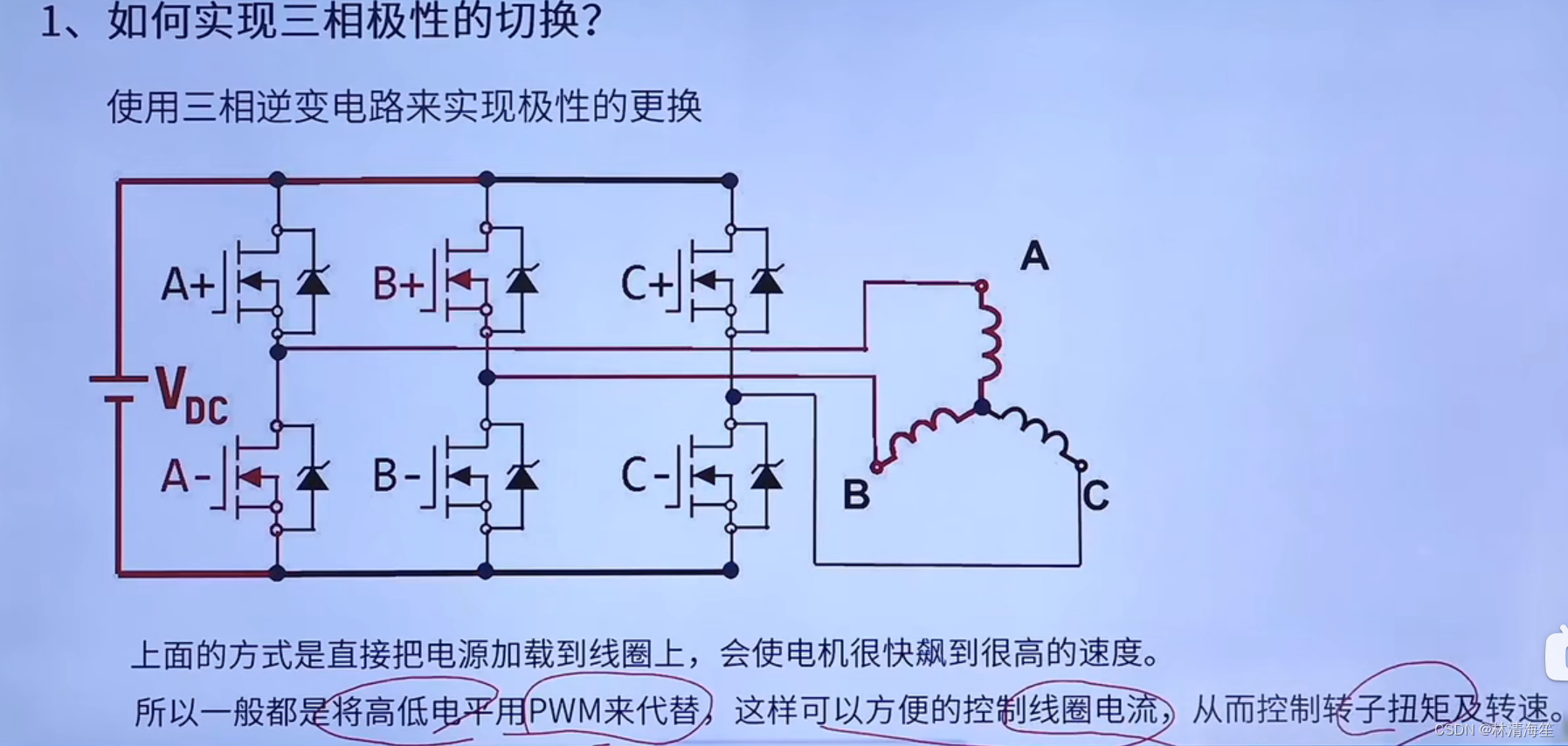
所以此时由六种情况,不能A+和A- 都同时导通,否则会出现短路的情况。只能是C+到A-,B-到A+这样导通。假设为A+和B-导通,那么电流从A相流入,B相流出,经过B-流回电源负极。
但是这种方式是直接把电源加载到了线圈上了,电机的速度就会很快的飚上去。实际控制我们是想控制它的转速和扭矩。所以一般将高低电平用PWM来代替,这样就可以控制线圈的电流了,进而就可以控制转子的扭矩和转速了。
所以我们通过PWM来控制功率管的开关。
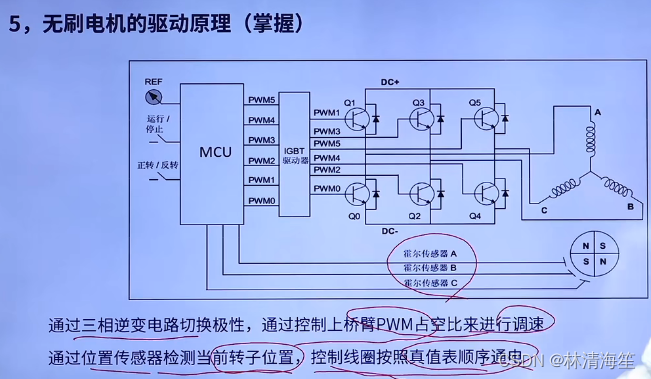
MCU即电机开发板,开发板输出PWM信号,来到无刷驱动板,无刷驱动板会给信号进行放大,来驱动逆变电路,这样就能实现单相极性的切换,看看是上桥闭合导通还是下桥闭合导通,还有就是转速的控制,只需要控制PWM的占空比,就能控制转速了。
PWM控制BLDC的方法
在无刷电机中,PWM控制有五种,又分为全桥调制和半桥调制。
全桥调制类似图e,也就是上桥闭也用PWM控制,下桥闭也是用PWM控制,但是这对于mos管的开关损耗是非常大的,所以一般不适用这种,一般使用上面四种
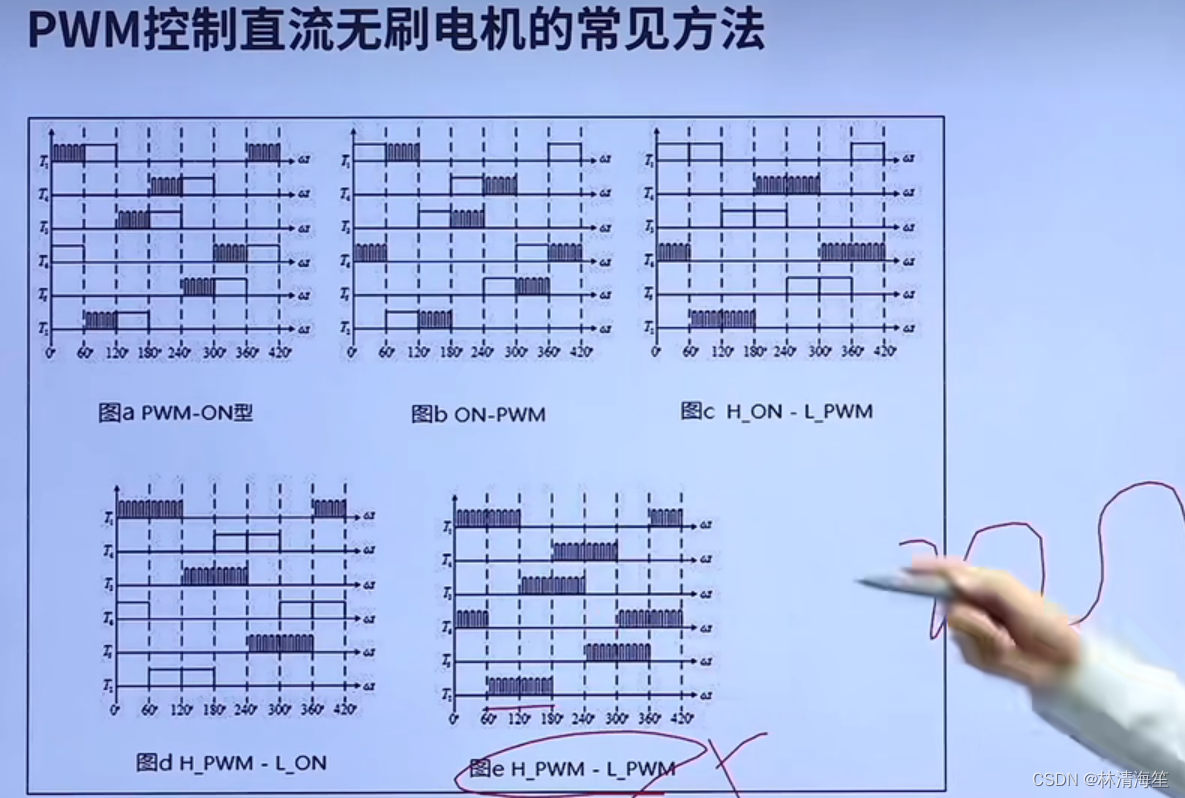
上面的四种又分为对称性的半桥调制和不对称型的半桥调制。
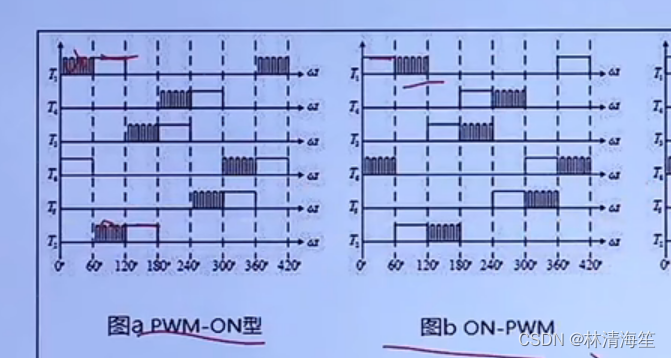
对称性为图a和b,一半是高电平一半是PWM,先是PWM控制上桥臂,然后是高电平控制下桥臂。
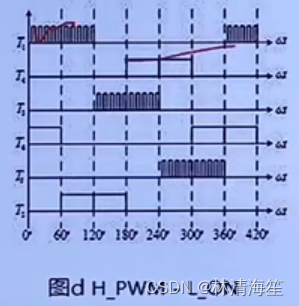
还有一种是不对称型,上桥臂用高电平,下桥臂用PWM控制。在实践中用的比较多的是图d,H_PEM-L_ON。那么这样做的好处是,转速只取决于上桥臂的PWM占空比控制,

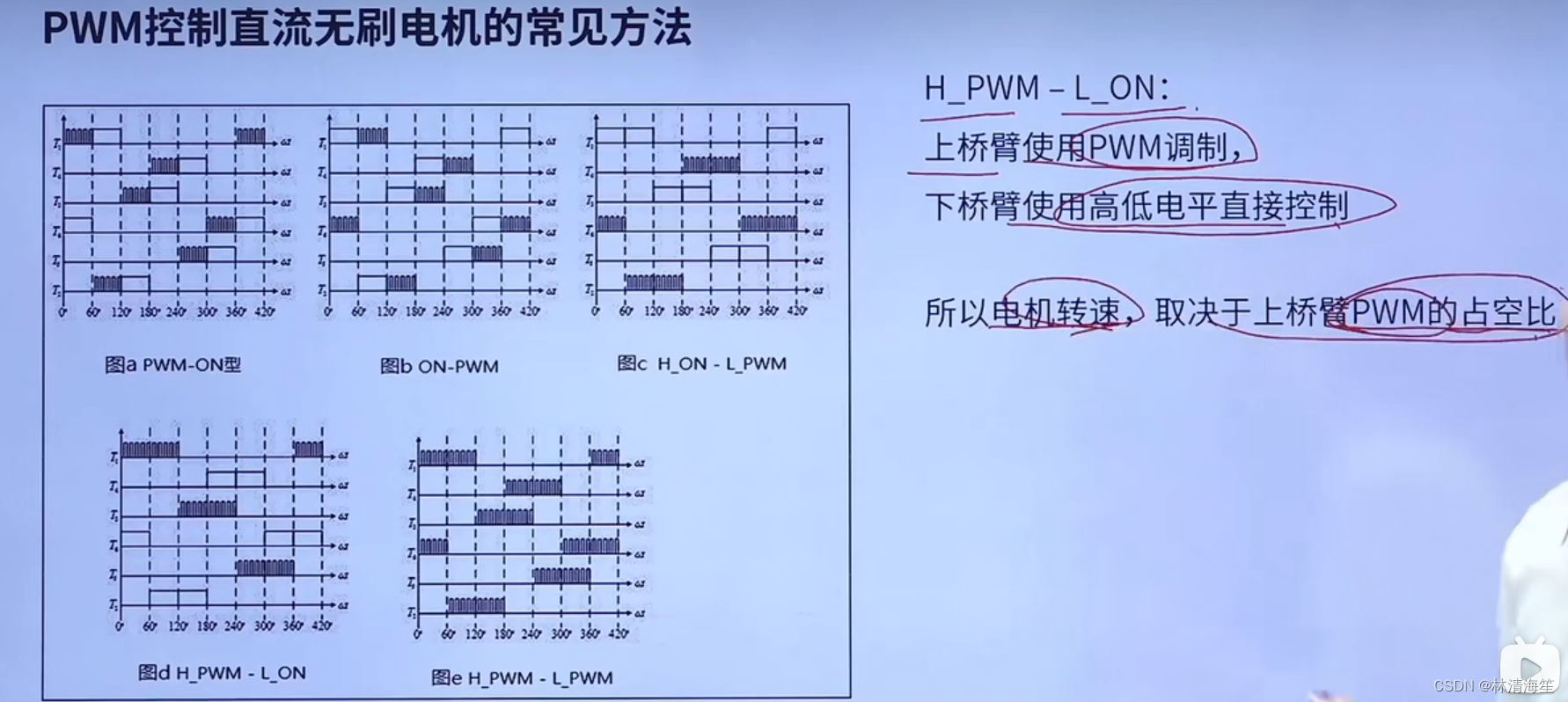
总结就是,如果是A相流向C相,那么控制A相的半桥使用PWM控制使上桥臂导通,由于C相是接负的,所以其半桥电路是使用高电平使C相的下桥臂导通。这样就能实现从A相流向C相了。而且我们可以通过调节PWM的占空比来控制转速
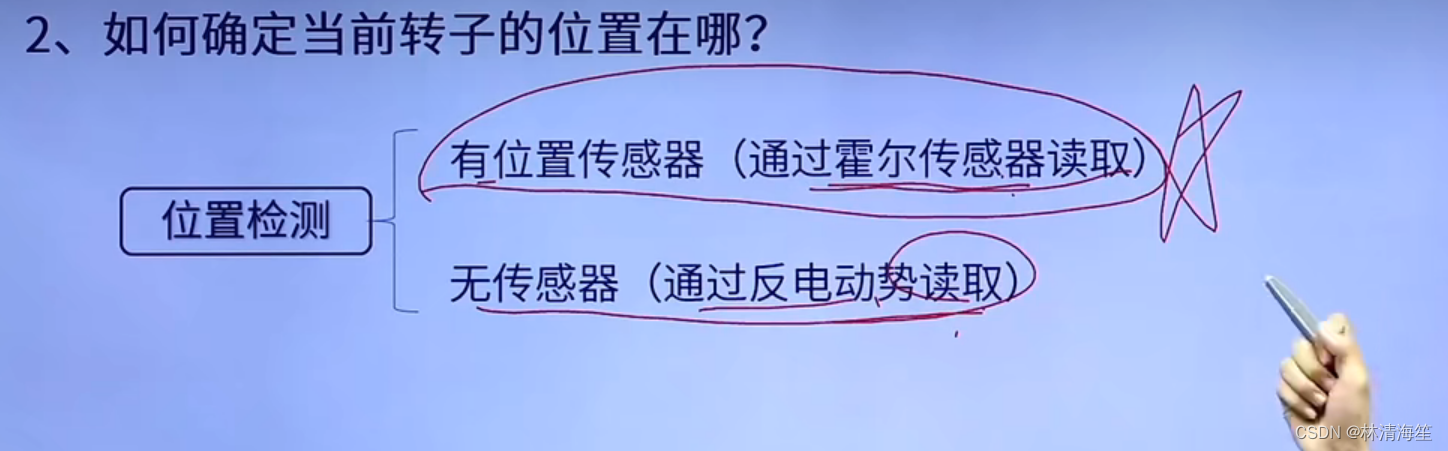
(2)如何确定转子的当前位置
有两种方法,第一种是通过位置传感器,常见的传感器是霍尔传感器,编码器等等,但主要用到的还是霍尔传感器。
第二种方法是没有传感器的方法,通过反电动势来进行读取转子的位置,(在后面无感驱动课程中会详细介绍)
霍尔传感器的识别方法是,当N极面向传感器的时候,输出高电平,S极面向传感器时,输出低电平。因此霍尔传感器就会依次输出高低电平。
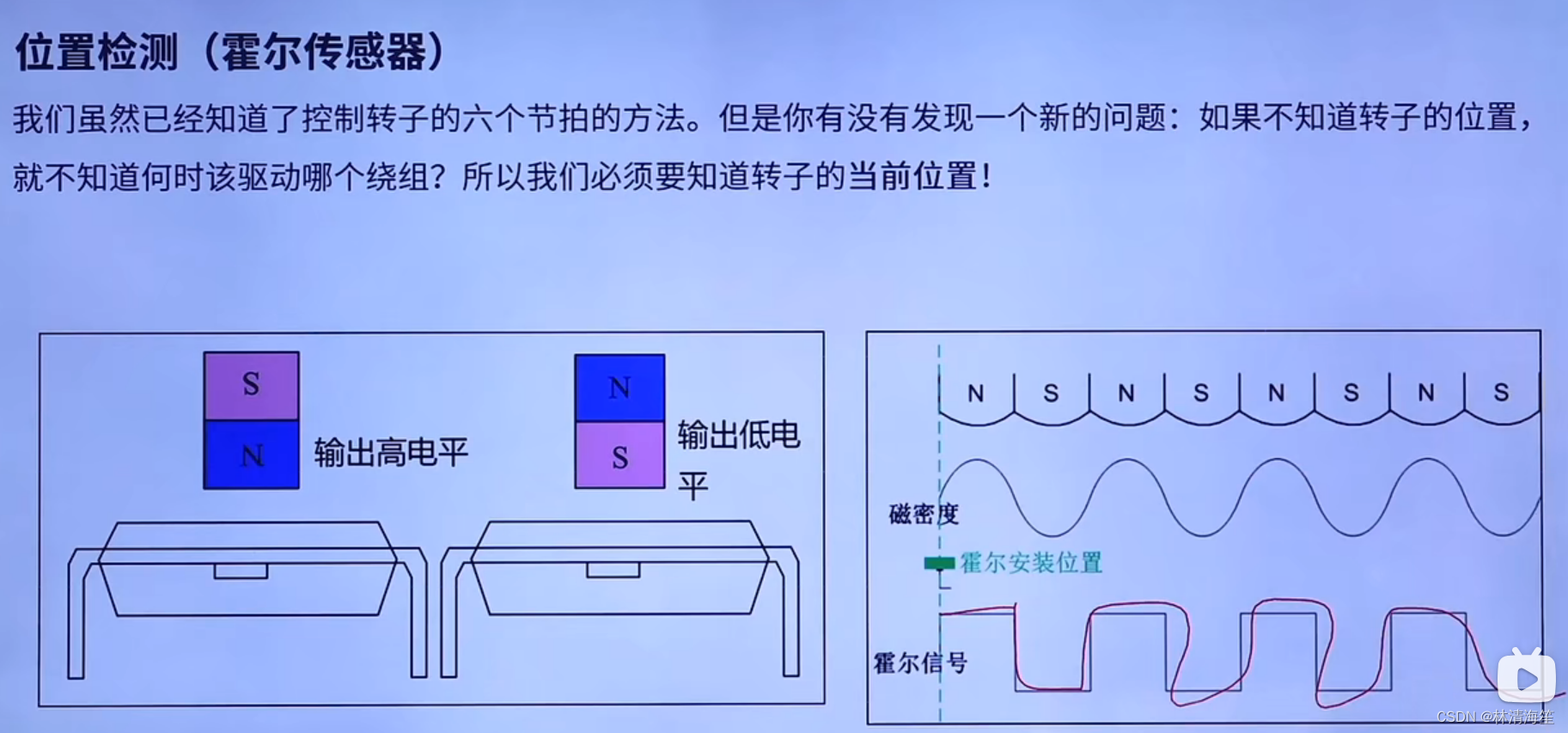
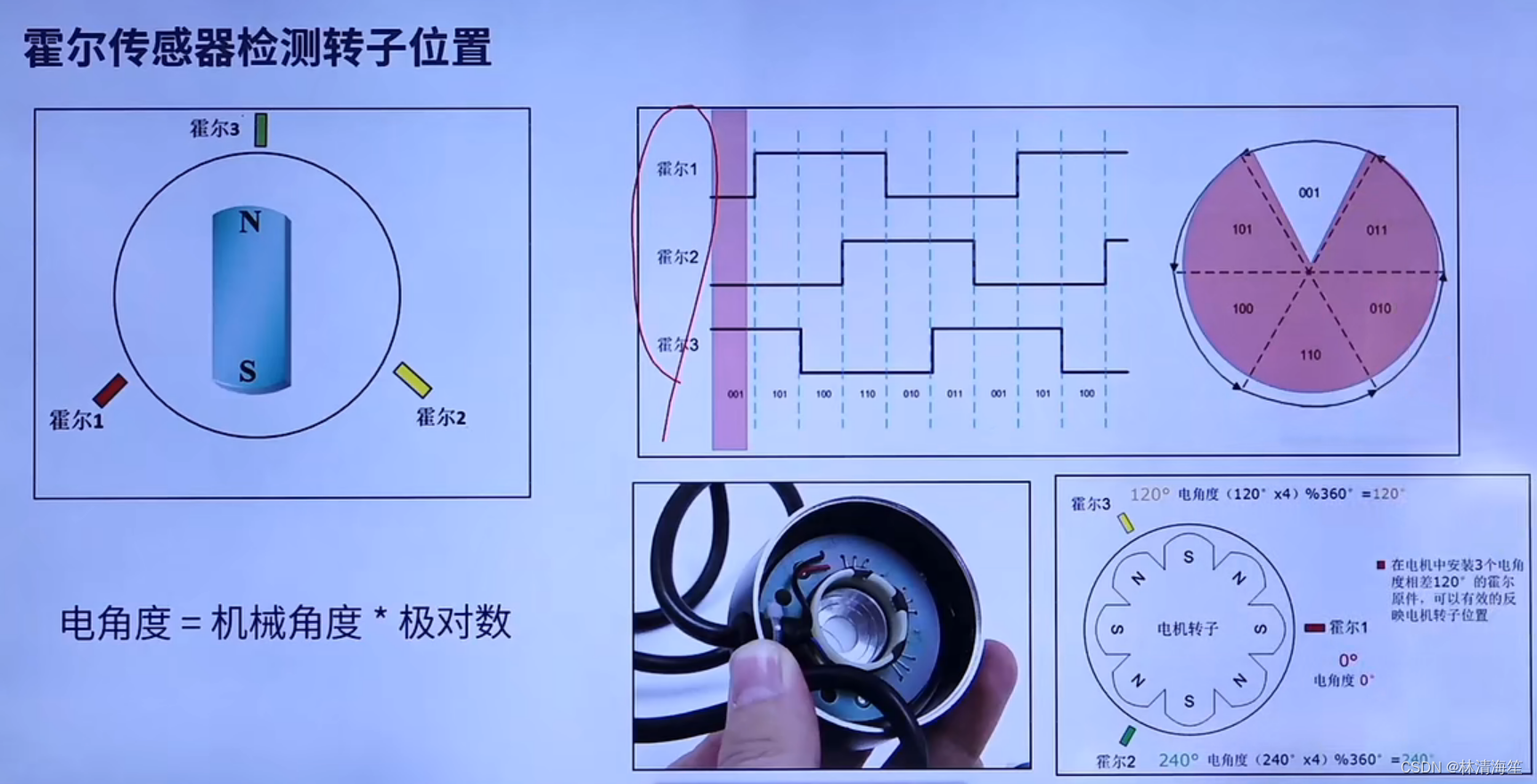
但是通过一个传感器是检测不出来的,必须通过三个传感器,而且电角度必须满足120度的排列。但是之前的实物图中,并不是按照120度排列的,而是60度排列的,而且转子的磁极是两对极。
但是电角度和机械角度是不一样的,他们之间具有一定的换算关系。这里的60度是指机械角度。因此60度的机械角度乘以二对极就等于120度的电角度。
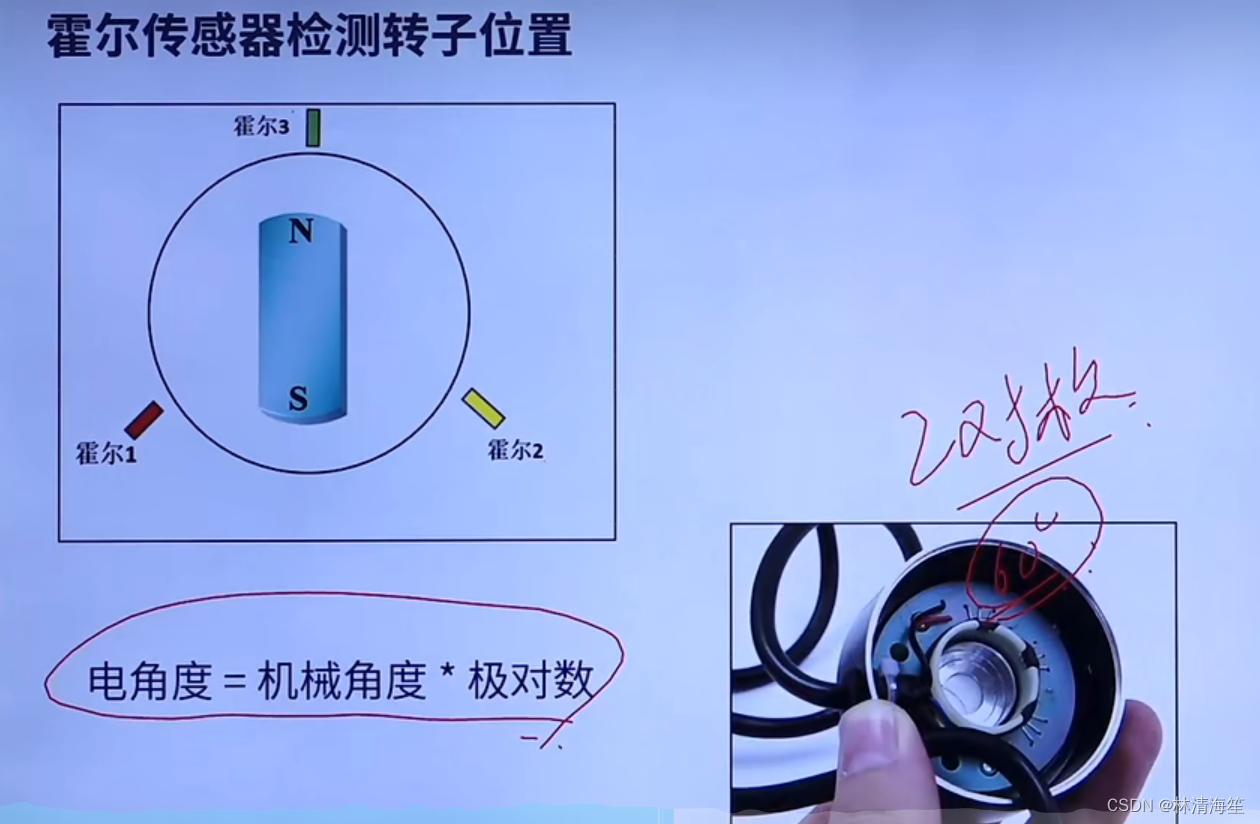
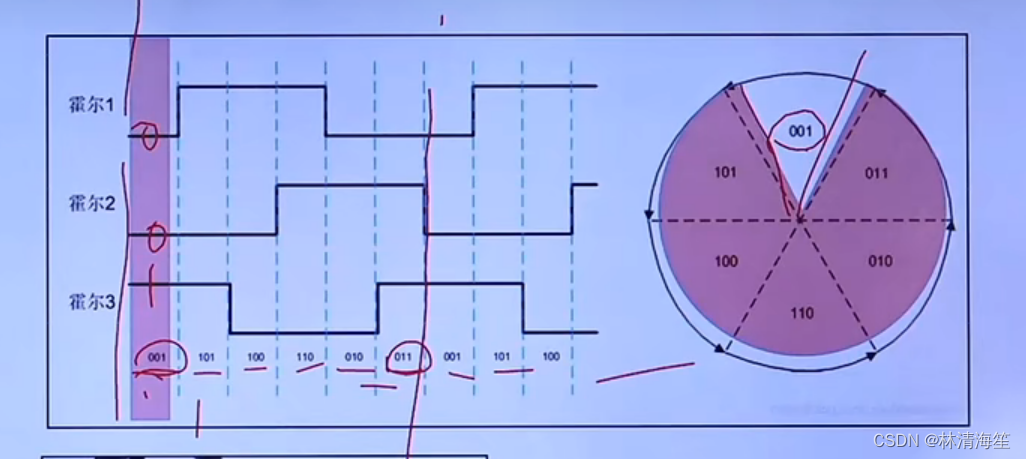
那么知道了120度电角度,就能知道输出的波形了,不同的传感器之间时存在相位差的,一格是六十度,有两格就是有120度的相位差。
在第一种状态下,N极指向霍尔三,而S极指向霍尔1和二,所以霍尔三输出高电平,霍尔12输出低电平,最终输出001。依次循环下去就是六步换向。

在这里是只有一对N和S,所以对于霍尔传感器来说就会面对一次N和S,所以高低电平的时间是一样的。
当N极面对霍尔1时,持续高电平,S极面对时,持续低电平,高低电平各自有180度的电角度。因为当只有一个极对极的时候,电角度和机械角度是一样的。这是一个对极的情况,旋转一圈360度,有180度是高电平,180度是低电平。

如果是有两个对极的时候,有两个N和S,那么转子转一圈,一个霍尔传感器就会经历两次N和两次S,每次N和S都经历180度。因为电角度是180度,极对数是2,所以对应机械角度是90度。那么会经历四个高低电平,所以总共是4*9=360度,也就是一圈。后期在速度求取需要用到。
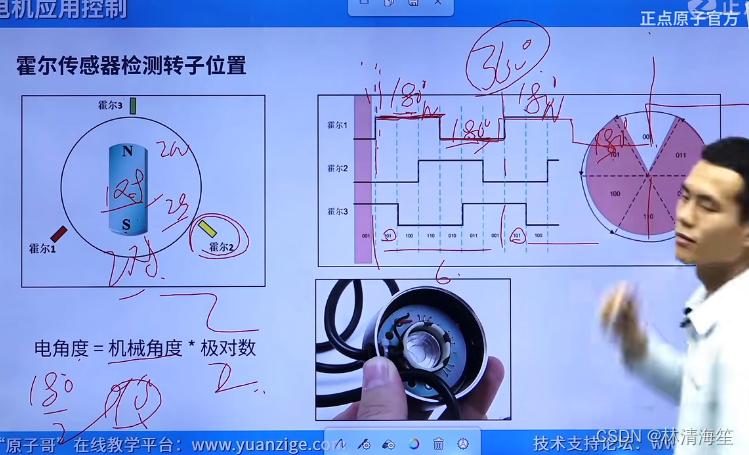
那么如果是四对极,就会经历
那么通过霍尔组合就能确定转子的位置,但是不确定是哪一相。但是厂家会给出下面的真值表。
霍尔与饶阻得电情况的真值表
这个表是基于无刷电机的。不同的无刷电机对应的表是不一样的。
那么当霍尔读数为101,那么对应U+和V-打开,即对应U的上桥臂打开,V-对应v的下桥臂打开。度数为101对应霍尔值为5,所以霍尔值为5的时候打开Q1和Q4。按照读出来的值去打开对应的饶阻。
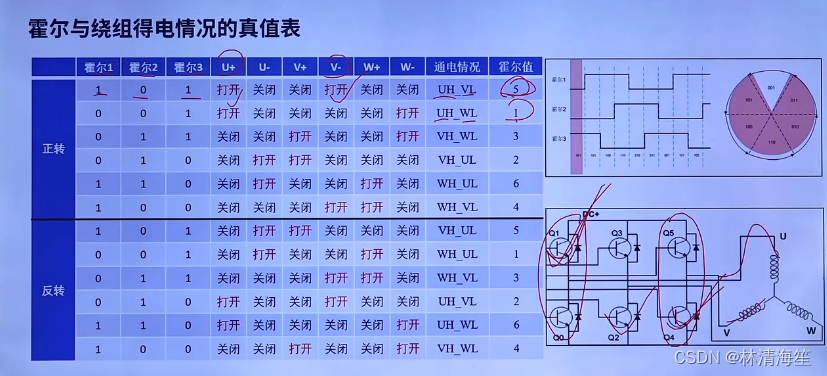
如果是反转,逆时针旋转,那么就对应V+和U-。
首先判断旋转的方向,接着读出霍尔值,然后去导通对应的饶阻,这样按照要求就能够旋转起来了。
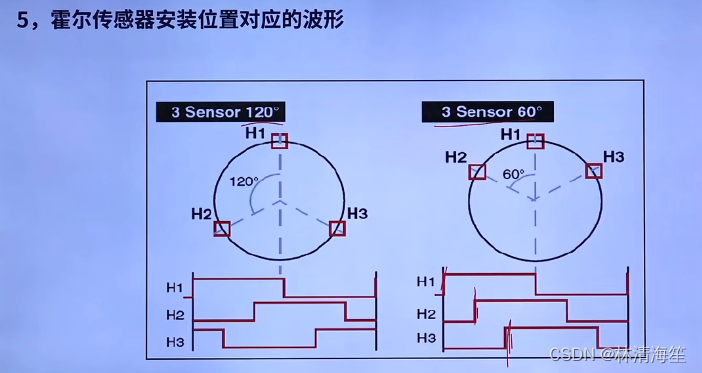
霍尔传感器安装位置对应的波形
电角度为120度,传感器之间的相位差就是120度,如果电角度是60度,相位差就是60度。
5.总结
霍尔位置传感器,使用PWM输出,驱动器放大,来到逆变电路,通过读取转子的位置,来控制饶阻的哪个来导通,根据真值表查看。

这样就能实现电机的有感驱动。
六.无刷电机驱动板的介绍(熟悉)
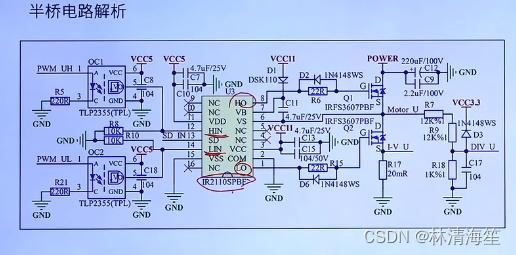
1.半桥电路解析
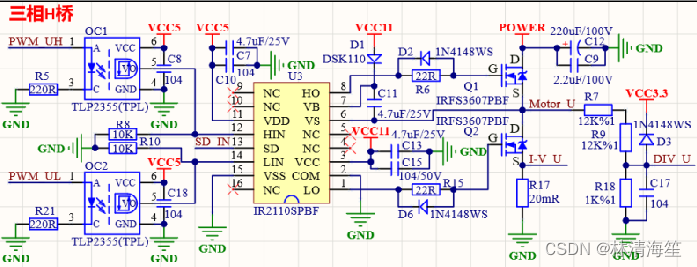
上桥臂由PWM_UH控制,即PWM控制,下桥臂由高低电平PWM_UL控制。
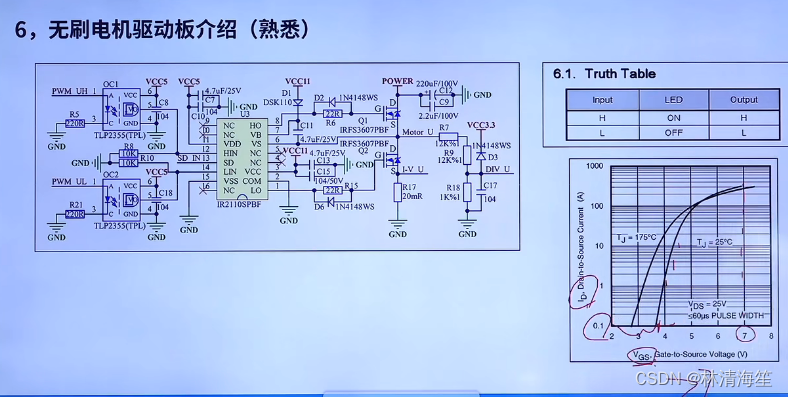
然后通过高速光耦TLP2355,右图展示了光耦的真值表,当输入为高时,输出也为高,LED就是里面的一个光敏。光耦主要由隔离保护IO的作用。然后输入到IR2110S的HIN和LIN端口。主要通过这两个端口来驱动后面两个输出HO和LO。
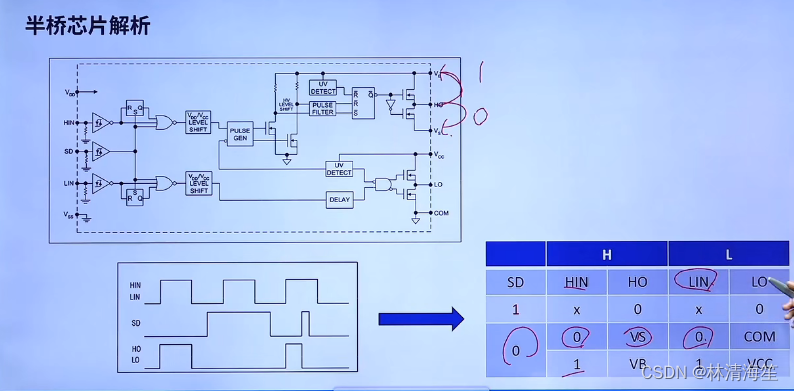
半桥芯片内部结构图如下,不需要管内部的操作,只需要管输入和输出。
当SD为0的时候,输入为高,输出就是高,输入为低,输出就是低。而当SD为1的时候,无论输入是什么输出都是低。
然后输出LO和HO连接到MOS管,如果要是mos管导通,就要是其g极大于一定的电压,下图为G即和J的曲线,首先有两条曲线,第一条是25度的,第二条是175度的,通常是分析常温下25度的曲线。横坐标是VGS,也就是G极和S极之间的电压,纵坐标就是电流了。那么从图中可以发现,当电压在0~3.5v左右的时候,处于关断的状态,电流几乎为0,当大于这个点的电压时,就是开通了,但它不是完全开通,因为电流比较小,如果要完全开通就需要到7v左右的电压,此时mos管才能完全开通。所以在G极侧有输入11v的电压。
当HIN 输入为1的时候,此时HO=VB,而VB与11v电压相连,所以此时HO=11V,此时G大于S了,此时MOS管导通。但是一导通,S点的电压会被POWER的电压所抬升,(POWER通常是24v的)所以S点的电压变成24v了。但是S点为24v,而G点为11v,所以VGS又变成负的了,然后又关断了,之后又由于G点为11v又开通了,但是之后又关断。这样反反复复开通关断是不行的。
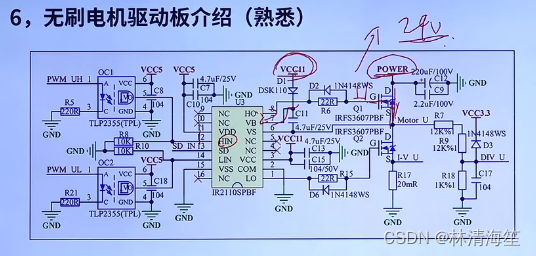
所以就有了自举升压电路。假设刚开始是下桥臂导通,电流就会经过C11导通连接到VCC11v,此时会给电容进行充电,充到了11v。那么当下桥臂关断 ,上桥臂导通时,HO就等于VB,输出11v,然后就会导通上桥臂的mos管,S点会被抬升到24v,但是S会给C11电容进行充电,也会抬升其电压,这个电压是VB的,所以它也会被抬升G极电压,这样就会保证G点比S点永远大过11v左右。这样就可以完全导通了。最终作用在U相里面。就可以控制上下桥臂的导通了。
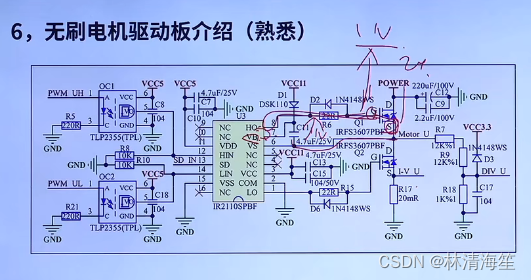
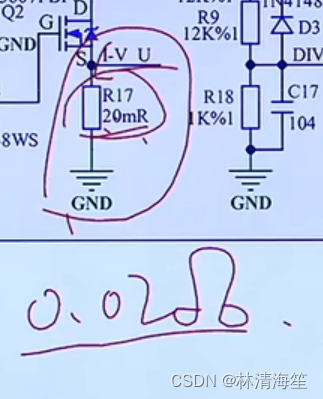
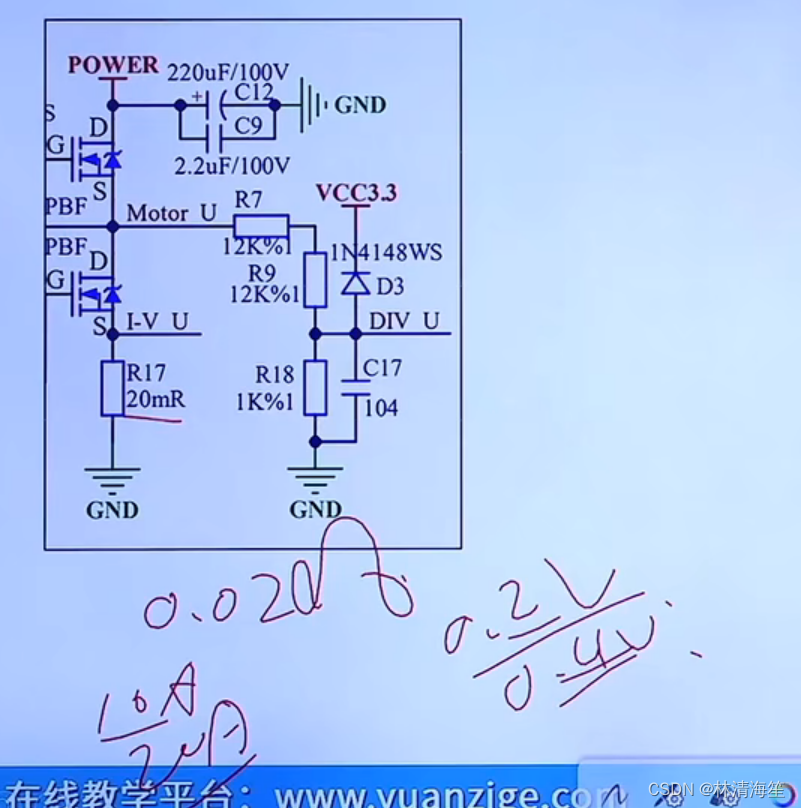
下面联通的是电阻采样,20m欧=0.02欧姆的电阻,采样L-V_U的电压,来计算出电流。
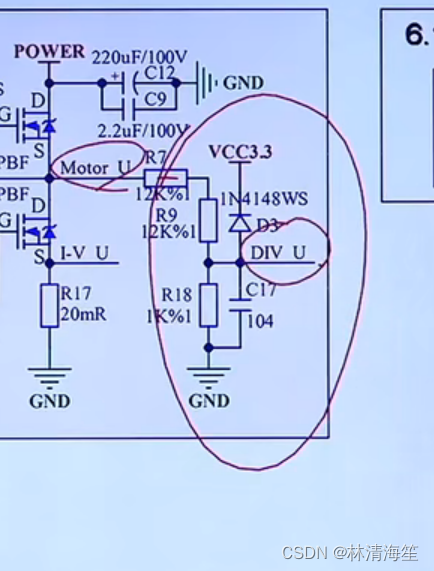
右边电路是采集反电动势用到的,但是相电压是比较大的,所以要组一个电阻分压网络,然后DIV_U才能输出到IO端口上面,
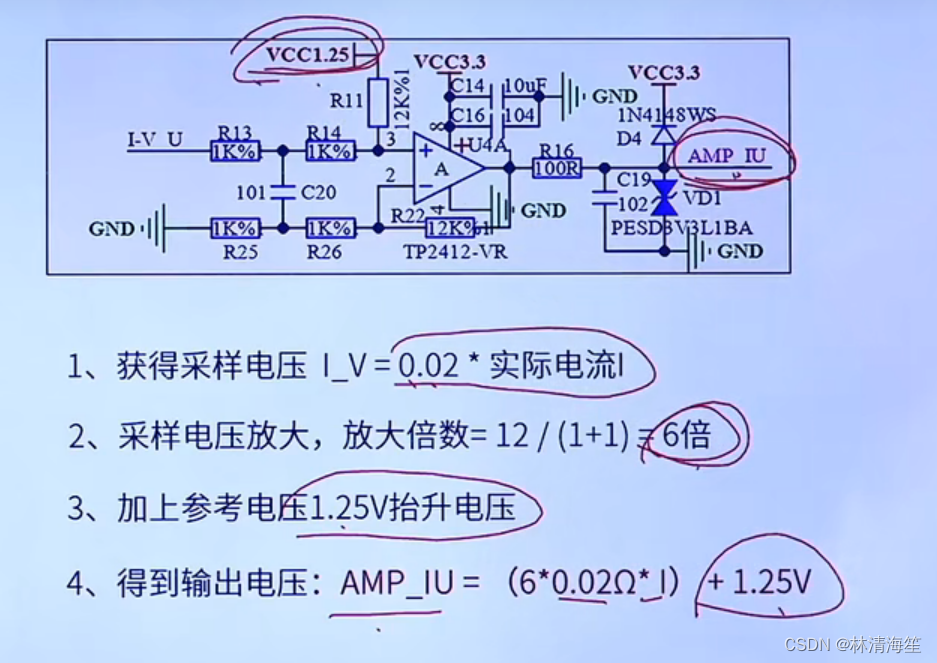
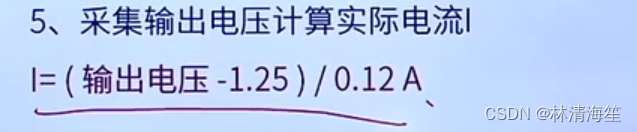
2. 三相电流采集
由于采样电阻只有20m欧,假设电流为10A,得到的电压为0.2V,电流为20A,得到的电压为0.4v。这对于一个低分辨率的ADC来说差距不大,难以识别出来,误差较大,所以需要将电压进行放大。进行差分运算。
把电压通过差分运算进行放大。放大倍数为6倍,但是还加了1.25v的抬升电压,所以最终放大后的电压为AMP_IU。那么ADC直接去检测放大后的输出电压AMP_IU即可,
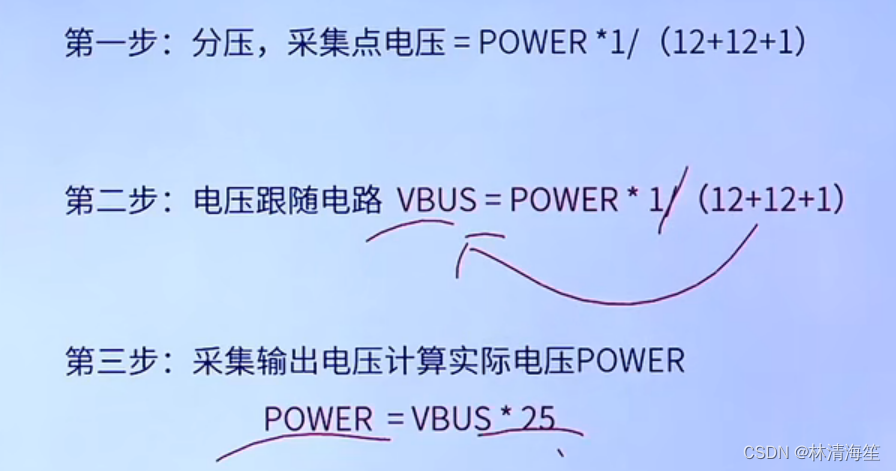
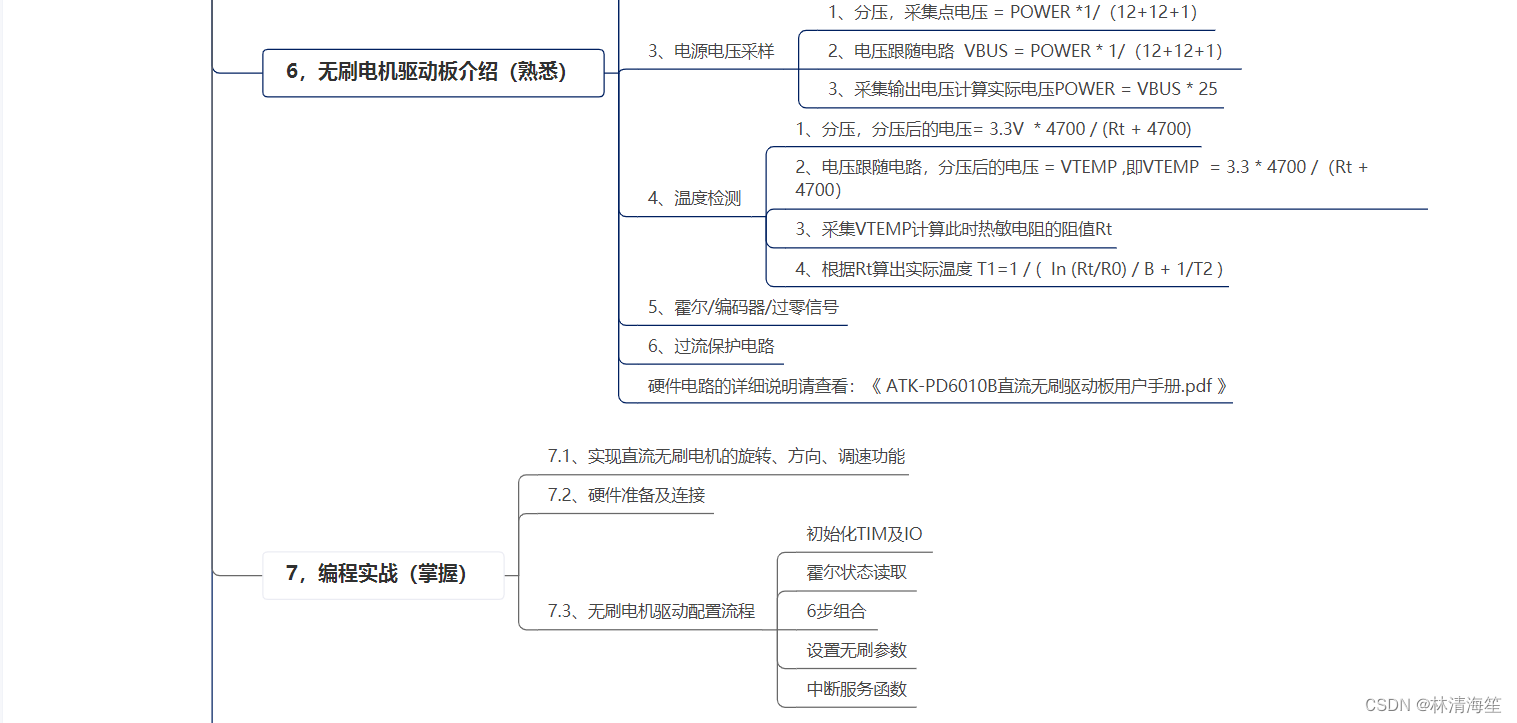
3. 电源电压采集
这里用的也是电阻分压,可以求得D25点的电压V,这个电压经过运放,没有放大,直接过来得到了VBUS。

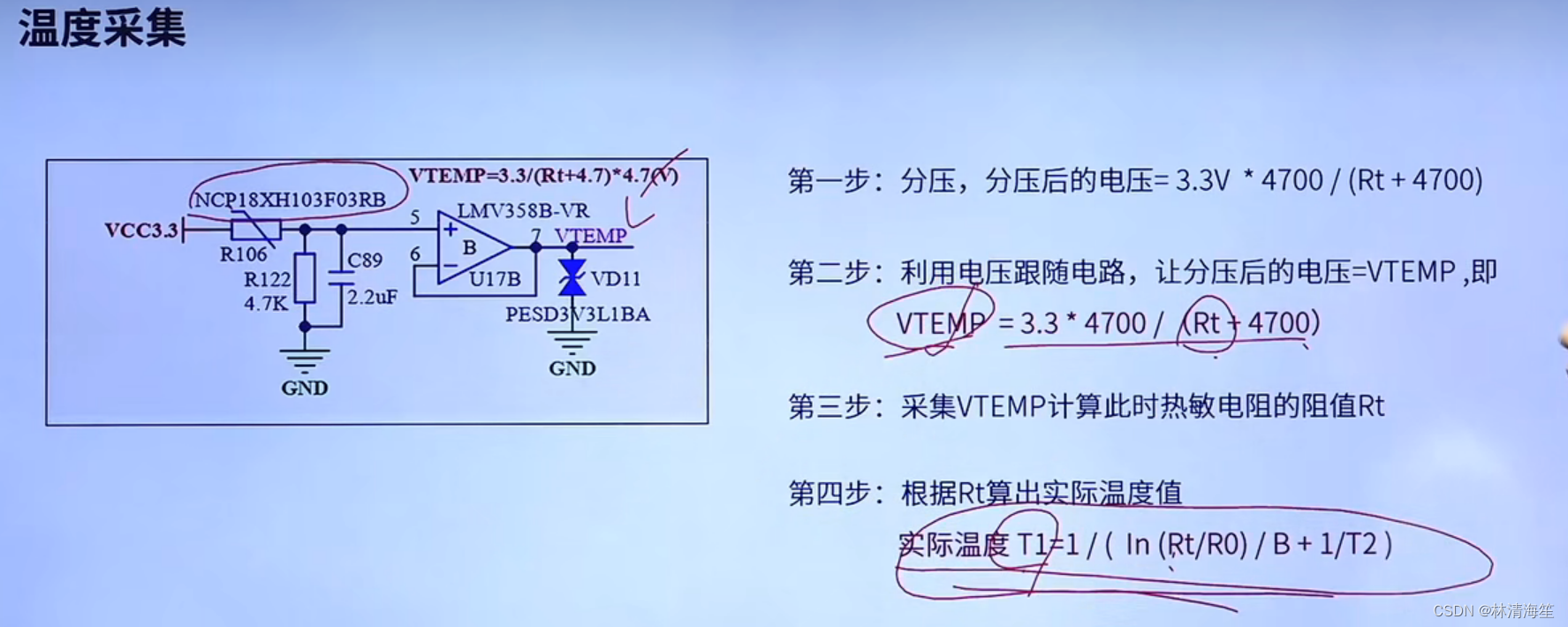
4.温度采集
使用了热敏电阻,温度不一样的话,其电阻阻值是不一样的。计算分压后经过热敏电阻后的点电阻值,然后计算放大后的电阻阻值。这些公式均可以在热敏电阻的数据手册上找到。
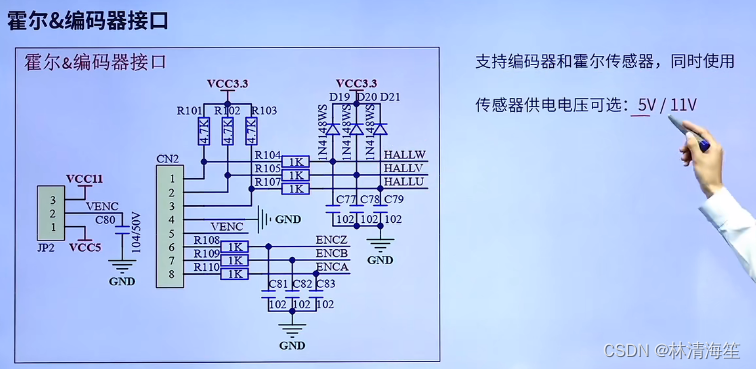
5.霍尔&编码器接口
CN2是霍尔和编码器的接线端子。这个电路的特点是同时支持霍尔传感器和编码器。这个作用在PMSM永磁电机的FOC会用到。
那么现在我们只用到了霍尔传感器HALL的W和V和U。同时也支持5v和11v的选择。
七. 编程实战(掌握)
1.实验目的
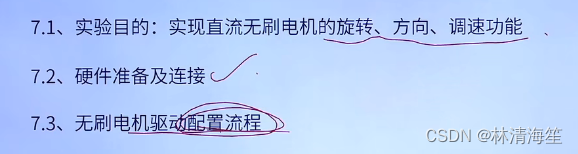
2. 硬件准备

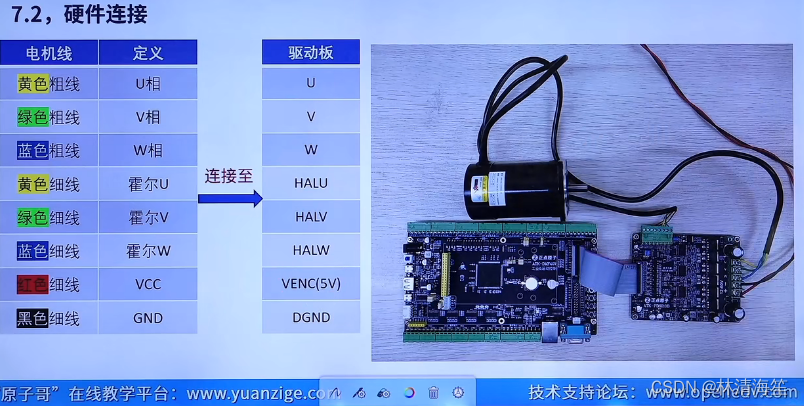
UH和UL就是逆变电路的上下桥臂,一共有三个半桥,每个半桥都有上下桥臂。
这里的意思是,U相的上桥臂由PA8进行控制,U相下桥臂由PB13控制。上桥臂是由PWM控制的,定时器1的通道1,2,3,控制PA8,9,10端口,而PB13,14,15是分别为通道1的互补通道,通道2的互补通道……只不过下桥臂是通过拉高拉低来控制开关的,所以下桥臂的端口使用普通的IO进行初始化,上桥臂端口使用定时器的方式进行初始化的。
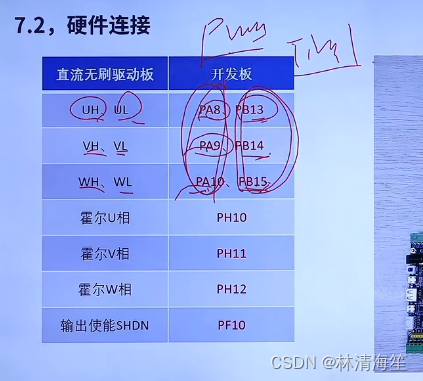
然后是霍尔的uvw三相,这里直接使用IO进行读取即可,因为霍尔输出就是0和1。
然后是shutdown引脚,整个半桥芯片的SD的开端,在这里使用PF10进行控制。
3. 无刷电机的驱动流程
首先是要初始化IO和定时器TIM,因为上桥臂是通过PWM控制的。初始化相关的IO,包括shutdowm引脚,霍尔传感器的读取,相关定时器的读取,以及上下桥臂。初始化定时器,以及开通中断。在中断回调函数里面一定要循环读取霍尔状态。

霍尔状态的读取,就是编写一个读取函数,因为霍尔是输出0和1,所以我们只需要用IO进行读取即可。
6步组合,就是上下桥臂的导通情况,一共有六种,通过六个组合实现电机的转动。
设置旋转方向以及占空比(即转速控制),然后编写无刷电机的启动以及停止函数。
在中断服务函数里面要读取霍尔状态,根据方向,比如正转有正转的顺序,反转有反转的顺序,然后结合霍尔状态依次导通上下桥臂。

(1)初始化TIM及相关IO
八. 课堂总结

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!