图像去噪——CBDNet网络训练自己数据集及推理测试,模型转ONNX模型(详细图文教程)
CBDNet 主要由两个子网络组成:噪声估计子网络和去噪子网络。噪声估计子网络用于估计图像的噪声水平,而去噪子网络用于去除图像中的噪声。
CBDNet 的优势在于:
它采用了更真实的噪声模型,既考虑了泊松-高斯模型,还考虑了信号依赖噪声和 ISP 对噪声的影响。
它采用了非对称损失函数,可以提高网络的泛化能力。
它结合了合成噪声图像和真实噪声图像进行训练,可以更好地适应真实场景。
CBDNet 的劣势在于:
它需要大量的训练数据,训练过程比较耗时。
它对硬件资源要求比较高。
目录
一、源码包准备
官网提供了源码包,我自己也提供了一份,我在官网基础上修改了一些代码,建议学者使用我提供的源码包。本教程是Pytorch版本的。
官网链接:CNDNet
我提供的源码包:网盘,提取码为:7nlv
论文地址:论文
下载解压后的样子如下:
二、环境准备
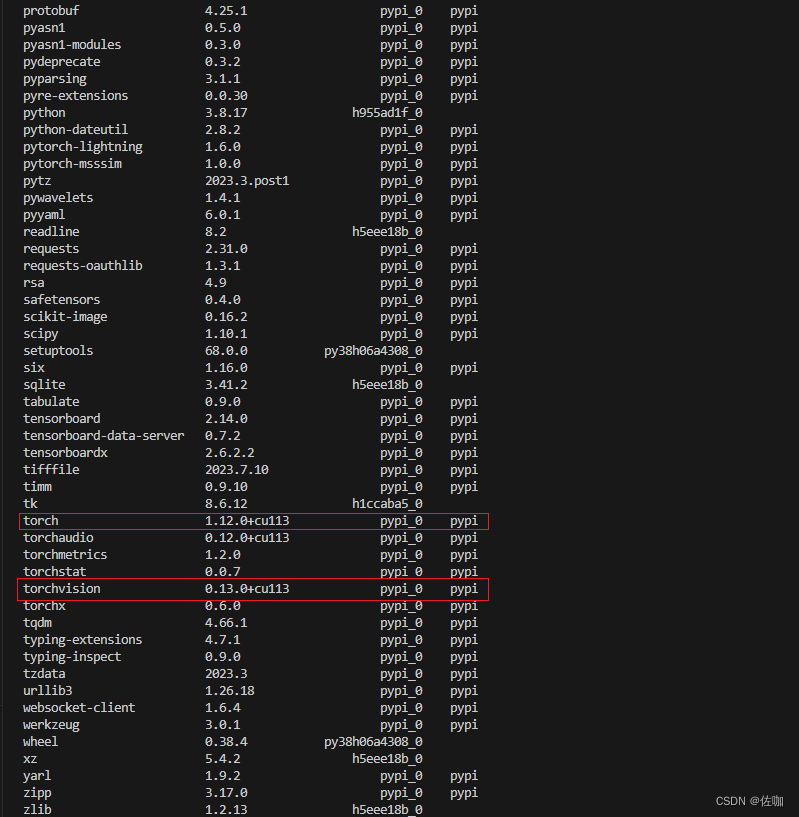
我自己的训练和测试环境如下,供参考,其它版本也行。
三、数据集准备
3.1 官网数据集
官网教程中有两个数据集,SIDD和Syn,且在链接中提供了一个已经训练好的模型权重文件。数据集和模型权重的下载链接为:SIDD Syn如下:

上面官网提供的两个数据集中,其中SIDD是真实的噪声数据集,Syn是合成噪声数据集。
下载后解压,其中SIDD数据集内容如下:

Syn数据集解压后的样子如下:
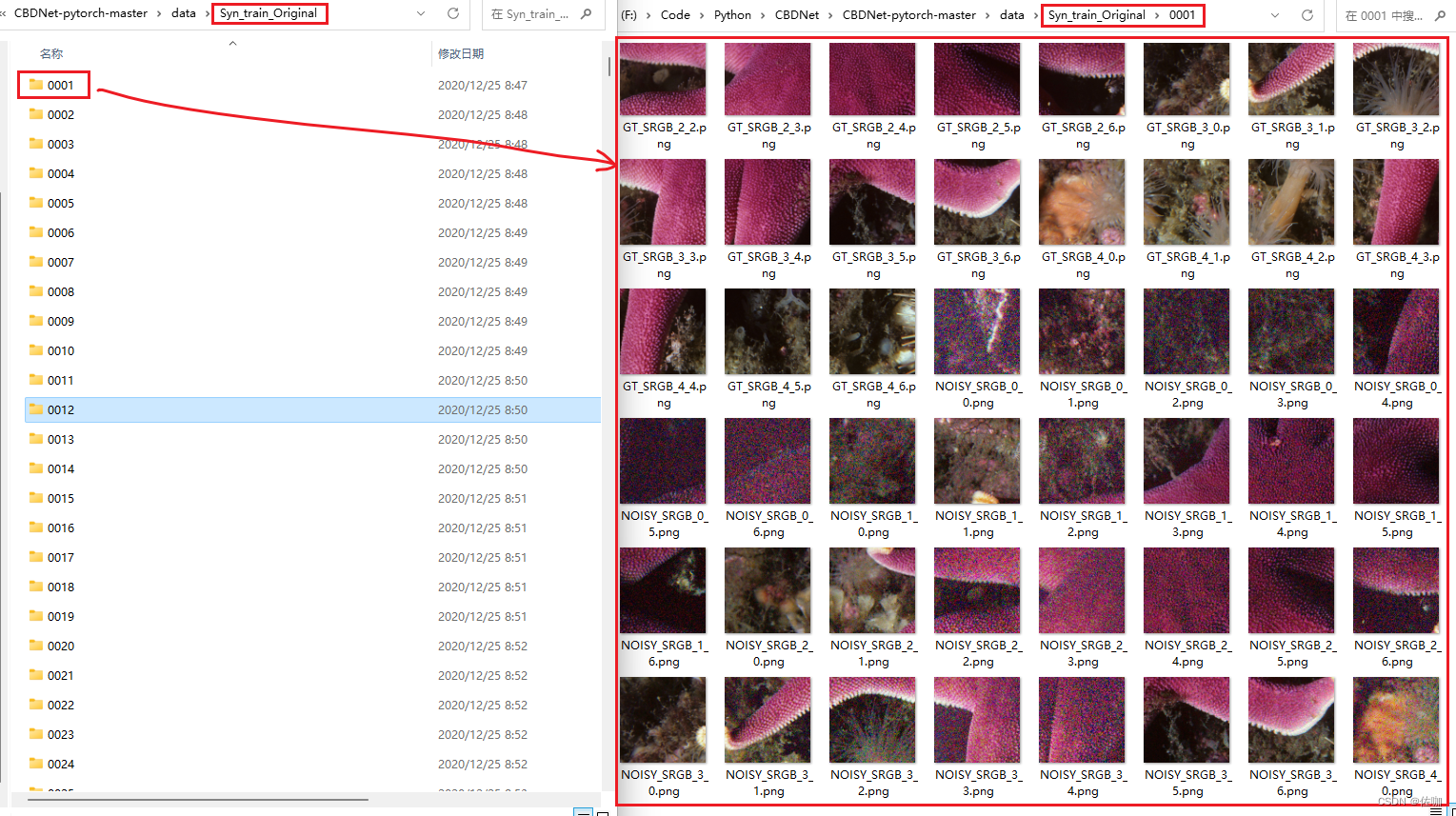
3.2 自己数据集准备
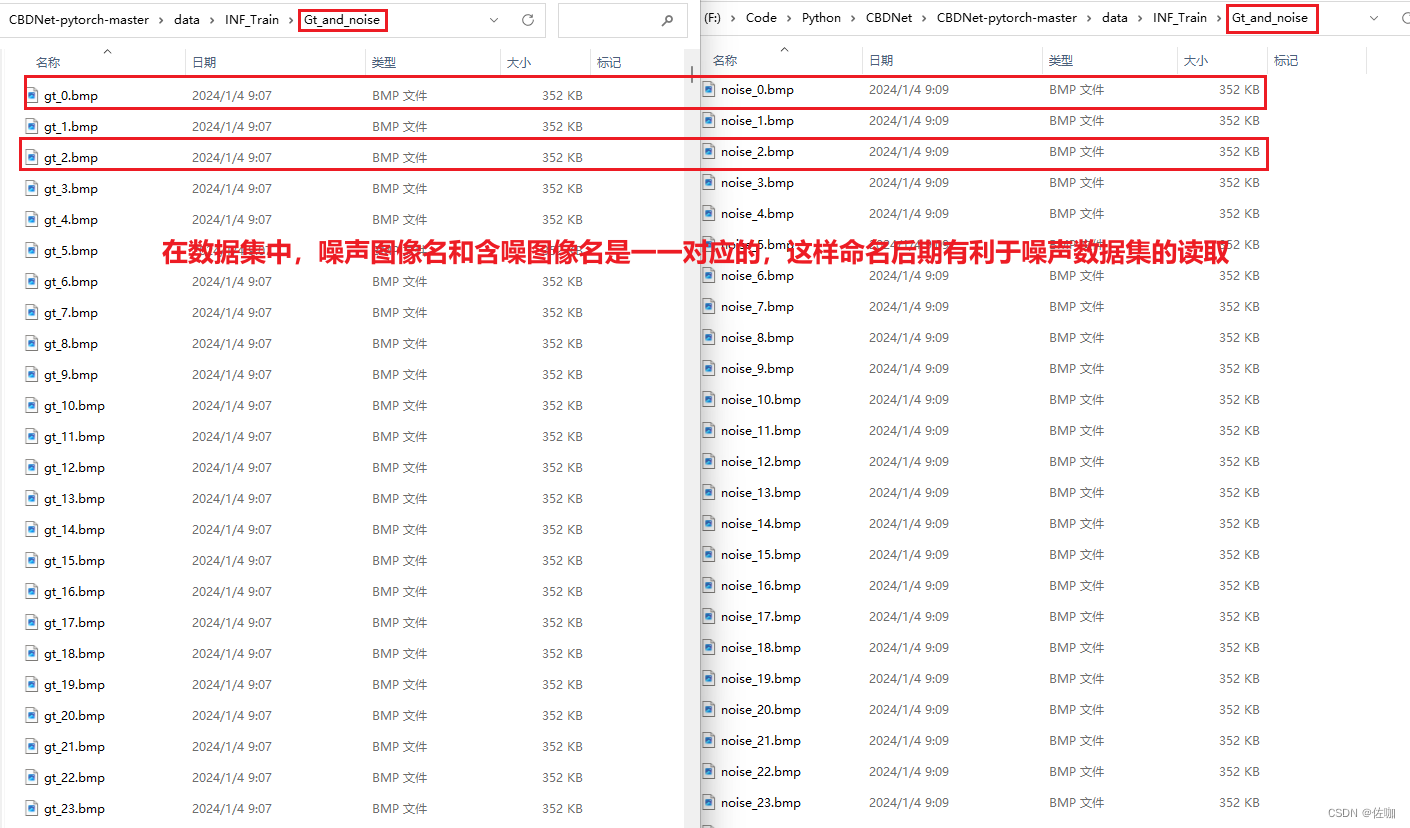
官网提供的数据集是将一副高分辨率图像裁剪为256*256大小后再加噪声,每一张高分辨率图像裁剪后得到的小图构成一个子文件夹,多个子文件夹构成整个数据集。
自己制作数据集时可以不用这么小的图片,也不用分这么多子文件夹,只需要将无噪图像和噪声图像同时放到同一个文件夹中,还要注意图片名字命名有规则,命名不一定要按照我的命名方式,自定义规则即可。如下:
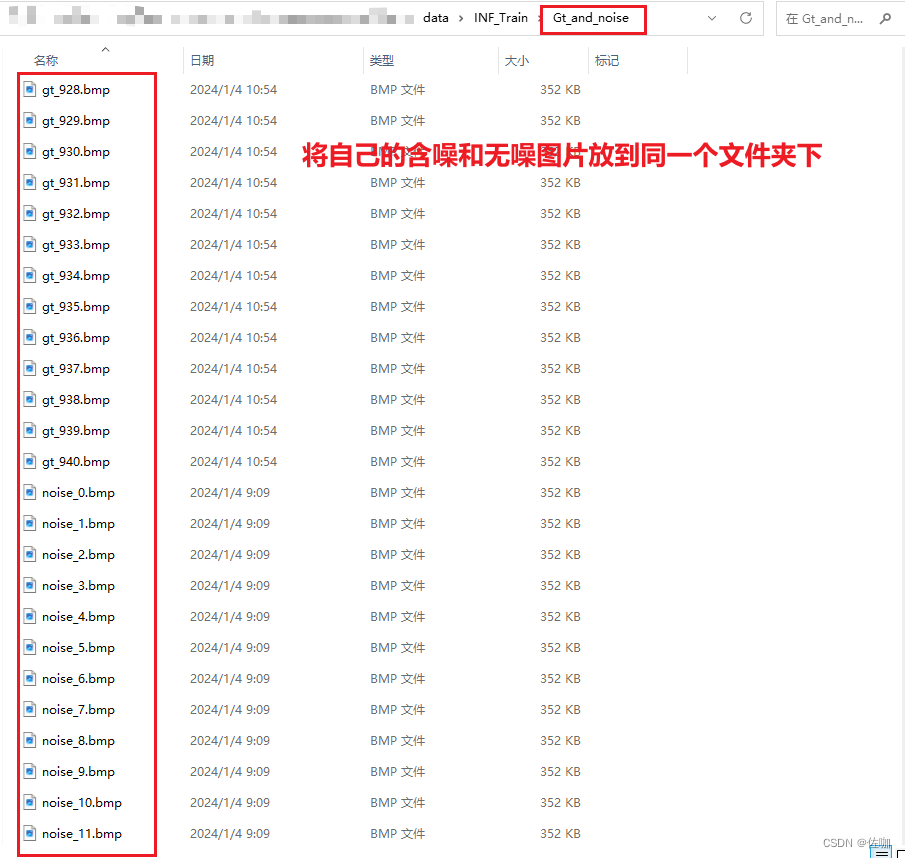
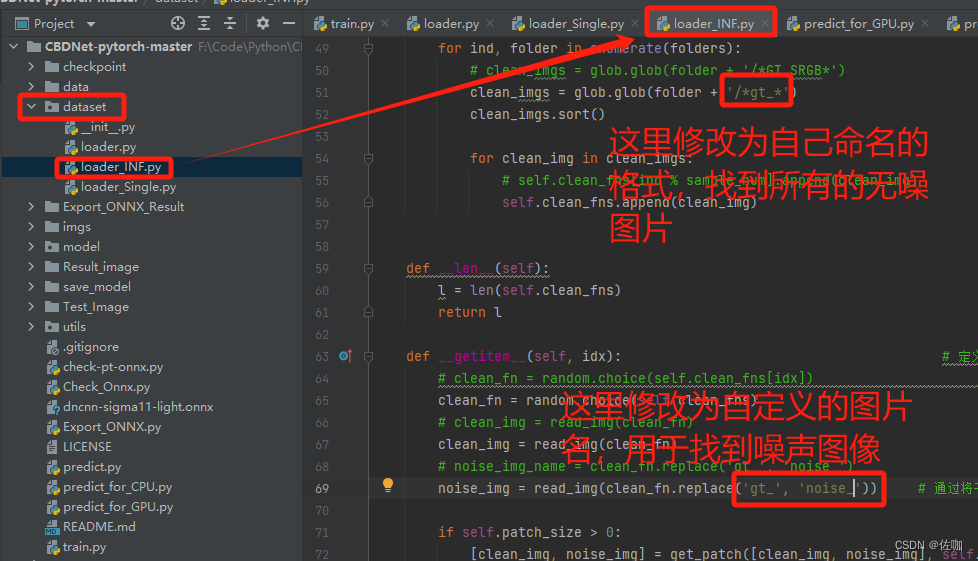
如果自己修改数据集的名字,在代码中也要对应修改,不然运行代码找不到图片,代码中具体修改的地方如下:
四、训练
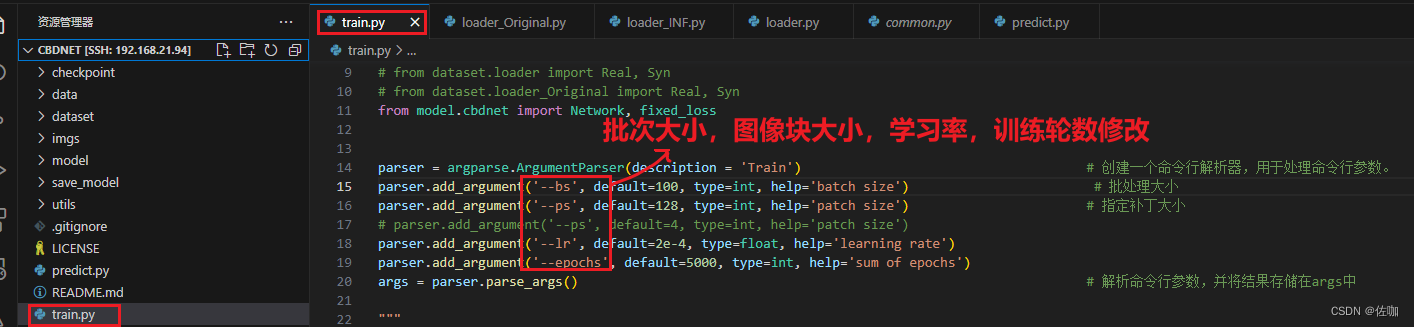
4.1 参数修改
下面是超参数修改:
4.2 训练集路径读取
下面是数据集路径读取:
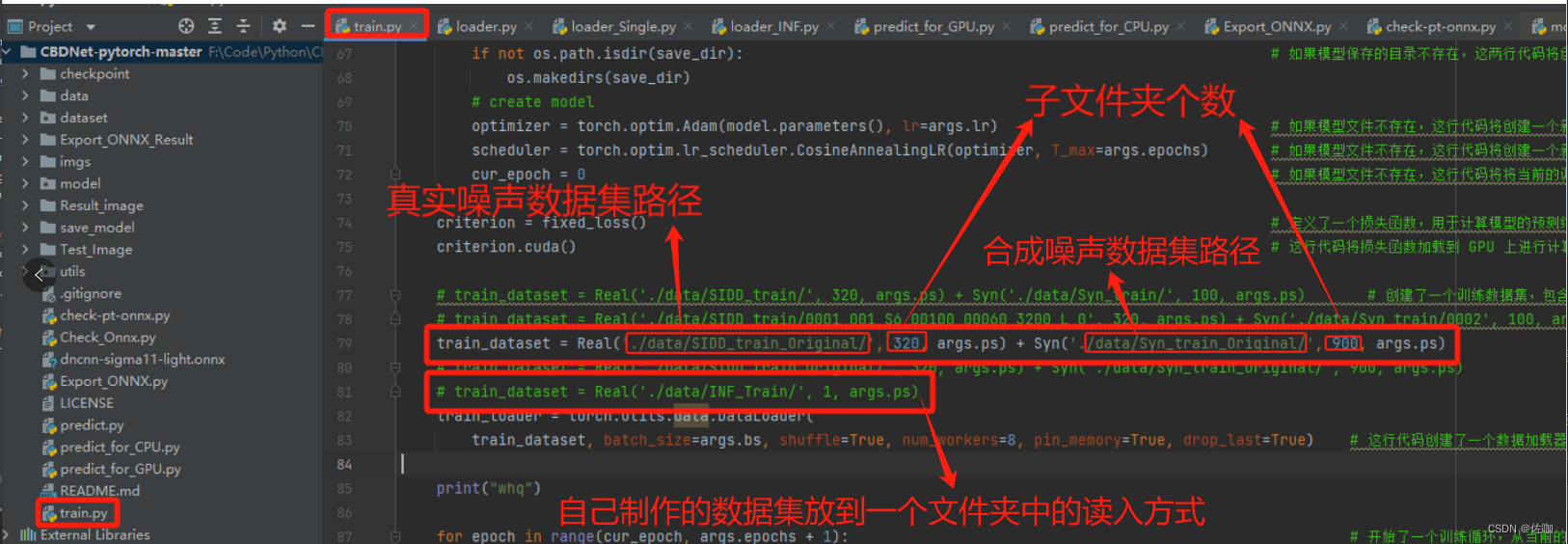
读入数据这里,batch_size的设置一定要小于子文件夹个数,不然训练时损失函数一直为0,训练结果不对。因为官网提供的源码中,如果一次喂入图片数量小于batch_size,就会被舍弃(主要是因为drop_last=True参数的设置),舍弃了就没数据训练了。

官网读取数据这部分原理是,假设选择SIDD数据集,batch_size设置为64,SIDD中有320个子文件夹,那么一个epoch中,就会随机选取64个子文件,并从64个子文件夹中选取一张图片,迭代5次后完成一个epoch。读取数据的代码如下,这部分代码在./dataset/loader.py脚本中第36行有:
class Real(Dataset): # 该类继承自Dataset类。Real类用于处理图像数据集,特别是用于处理含有噪声的图像和对应的干净图像
def __init__(self, root_dir, sample_num, patch_size=128): # 定义了类的初始化函数,接受三个参数:root_dir(数据集的根目录),sample_num(样本数量),patch_size(图像块的大小,默认为128)。
self.patch_size = patch_size # 将传入的patch_size赋值给类的成员变量self.patch_size
folders = glob.glob(root_dir + '/*') # 获取root_dir目录下的所有文件夹
folders.sort() # 对获取到的文件夹进行排序
self.clean_fns = [None] * sample_num # 初始化一个长度为sample_num的列表self.clean_fns,所有元素都为none
for i in range(sample_num): # 对于每一个样本
self.clean_fns[i] = [] # 将self.clean_fns的第i个元素设置为一个空列表
for ind, folder in enumerate(folders): # 对于每一个文件夹
clean_imgs = glob.glob(folder + '/*GT_SRGB*')
# clean_imgs = glob.glob(folder + '/*gt_*') # 获取该文件夹下所有名字中包含GT_SRGB的文件,这些文件是干净的图像。
clean_imgs.sort() # 对获取到的干净图像进行排序
for clean_img in clean_imgs: # 对于每一个干净的图像
self.clean_fns[ind % sample_num].append(clean_img) # 将该图像的文件名添加到self.clean_fns的相应列表中
def __len__(self): # 定义了类的__len__函数,该函数返回数据集的大小。
l = len(self.clean_fns) # 计算self.clean_fns的长度,即数据集的大小
return l # 返回数据集的大小
def __getitem__(self, idx): # 定义了类的__getitem__函数,该函数用于获取数据集的第idx个样本。
clean_fn = random.choice(self.clean_fns[idx]) # 中随机选择一个干净的图像
clean_img = read_img(clean_fn) # 读取该干净的图像。
noise_img = read_img(clean_fn.replace('GT_SRGB', 'NOISY_SRGB')) # 读取对应的含有噪声的图像
# noise_img = read_img(clean_fn.replace('gt_', 'noise_')) # 读取对应的含有噪声的图像
if self.patch_size > 0: # 如果patch_size大于0
[clean_img, noise_img] = get_patch([clean_img, noise_img], self.patch_size) # 则从干净的图像和含有噪声的图像中获取一个大小为patch_size的图像块
return hwc_to_chw(noise_img), hwc_to_chw(clean_img), np.zeros((3, self.patch_size, self.patch_size)), np.zeros((3, self.patch_size, self.patch_size)) # 返回含有噪声的图像块、干净的图像块以及两个全零的占位符
官网提供的这种读取方法对于大数据集读取速度很快,如果是自己制作的小数据集,只有一个文件夹时,就没必要按照官网的方法读取,因为如果只有一个文件夹,那batch_size就只能设置为1,batch_size太小,不利于训练和模型的泛化能力。修改读入数据这部分的代码,直接将所有图片数据读取存到列表中,在遍历列表读取即可,这么做的缺点是,数据集较庞大时,前期加载数据集会比较慢。修改读数据代码如下:
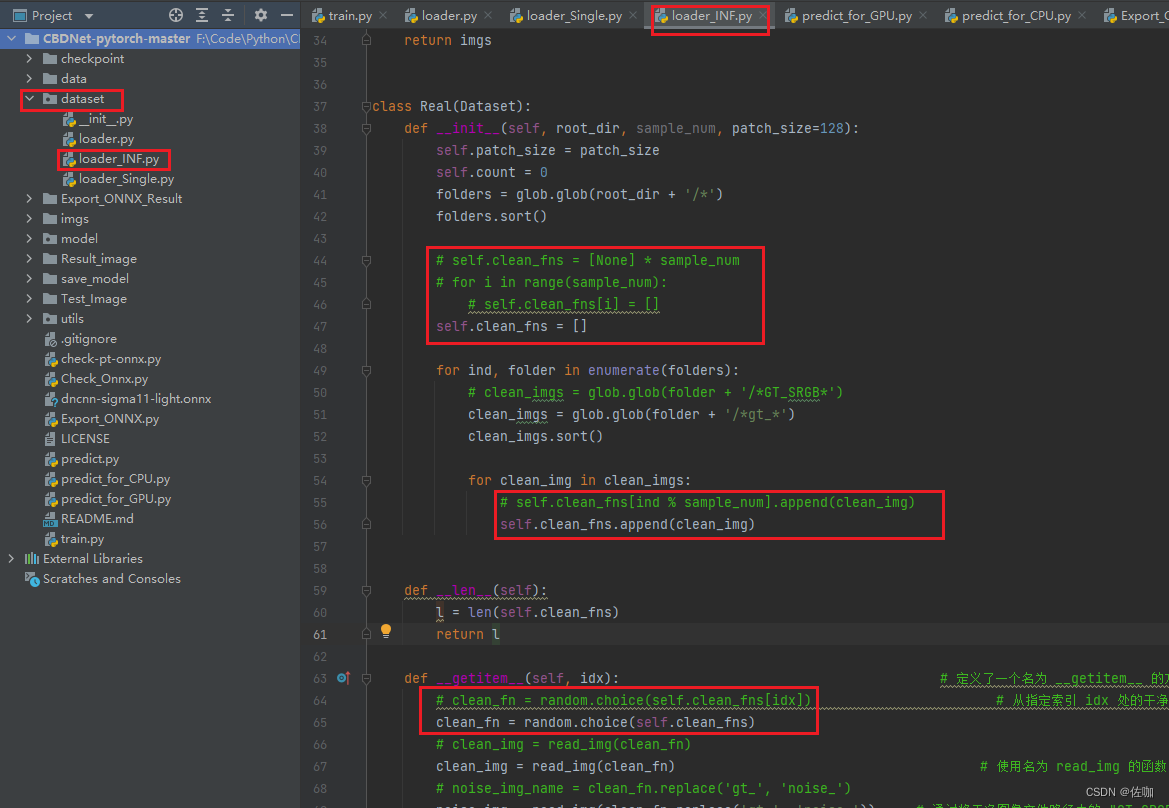
实际代码为:
class Real(Dataset):
def __init__(self, root_dir, sample_num, patch_size=128):
self.patch_size = patch_size
self.count = 0
folders = glob.glob(root_dir + '/*')
folders.sort()
# self.clean_fns = [None] * sample_num
# for i in range(sample_num):
# self.clean_fns[i] = []
self.clean_fns = []
for ind, folder in enumerate(folders):
# clean_imgs = glob.glob(folder + '/*GT_SRGB*')
clean_imgs = glob.glob(folder + '/*gt_*')
clean_imgs.sort()
for clean_img in clean_imgs:
# self.clean_fns[ind % sample_num].append(clean_img)
self.clean_fns.append(clean_img)
def __len__(self):
l = len(self.clean_fns)
return l
def __getitem__(self, idx): # 定义了一个名为 __getitem__ 的方法,它通常用于实现自定义 Python 对象的索引行为,例如访问自定义数据集中的元素。它接受一个索引 idx 作为输入,表示要获取的元素
# clean_fn = random.choice(self.clean_fns[idx]) # 从指定索引 idx 处的干净图像文件路径列表中随机选择一个文件路径 干净文件路径列表存储在类的 self.clean_fns 属性中
clean_fn = random.choice(self.clean_fns)
# clean_img = read_img(clean_fn)
clean_img = read_img(clean_fn) # 使用名为 read_img 的函数(通常用于读取图像)从选定的文件路径读取干净图像
# noise_img_name = clean_fn.replace('gt_', 'noise_')
noise_img = read_img(clean_fn.replace('gt_', 'noise_')) # 通过将干净图像文件路径中的 "GT_SRGB" 替换为 "NOISY_SRGB" 来读取对应的噪声图像
if self.patch_size > 0: # 检查是否指定了 patch 大小
[clean_img, noise_img] = get_patch([clean_img, noise_img], self.patch_size) # 如果指定了 patch 大小,则使用名为 get_patch 的函数从干净图像和噪声图像中提取指定大小的 patch
return hwc_to_chw(noise_img), hwc_to_chw(clean_img), np.zeros((3, self.patch_size, self.patch_size)), np.zeros((3, self.patch_size, self.patch_size))
用我提供的读数据方法,就可以根据自己电脑性能,设置为较大的batch_size值进行训练。
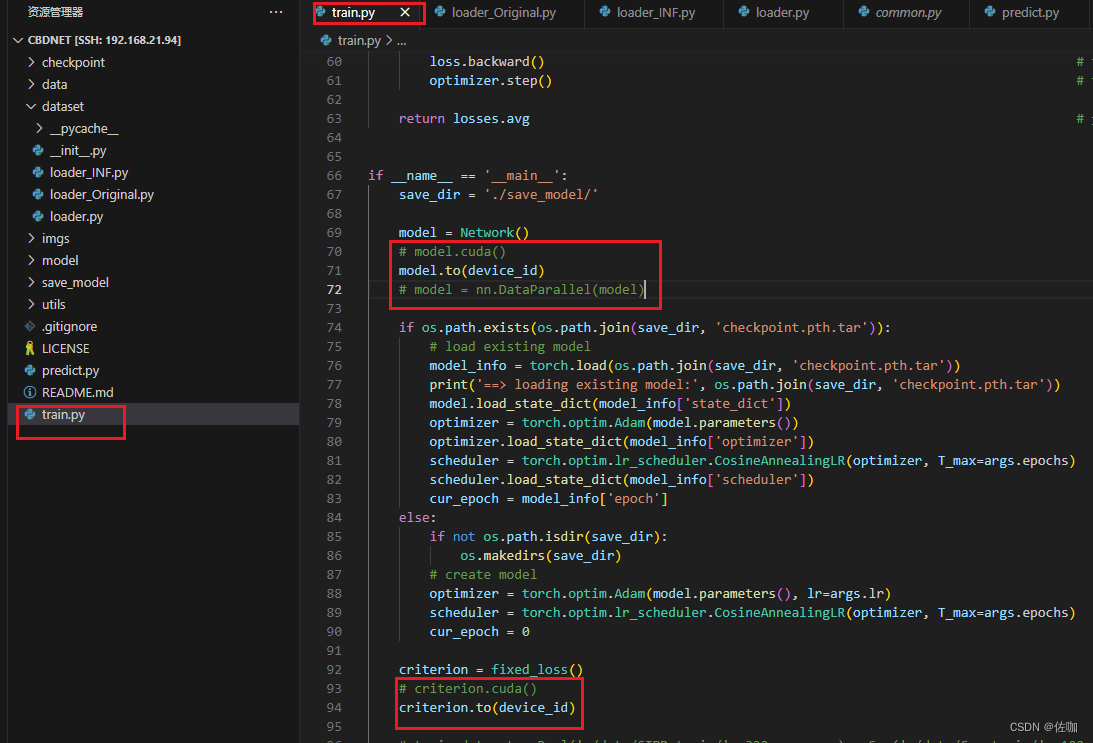
4.3 单卡或多卡训练
官网提供的源码,默认是直接调用电脑端的所有显卡并行训练,如果想自定义在第二块单卡上训练,需要添加代码,如下:
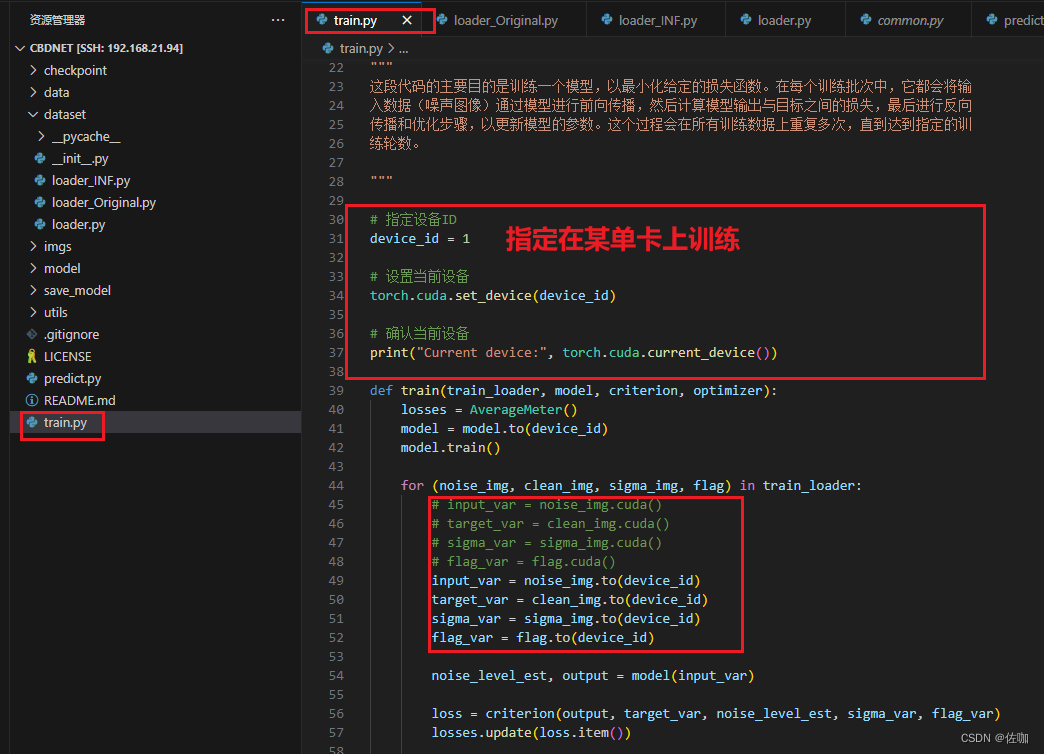
如果想要多卡并行训练,保持默认即可,不用修改。
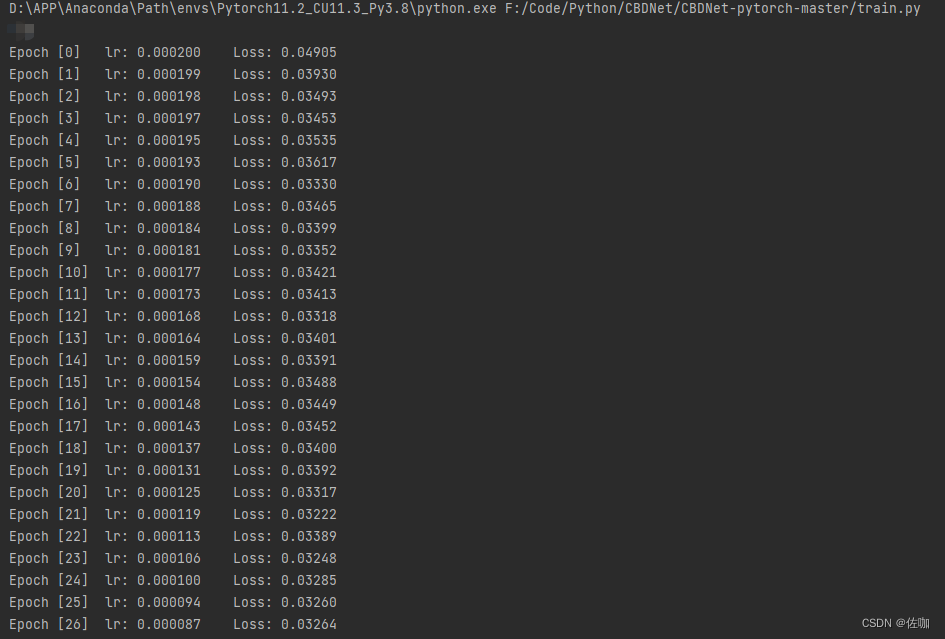
4.4 训练
上面参数和路径都修改好后直接运行train.py脚本就开始训练了,如下:
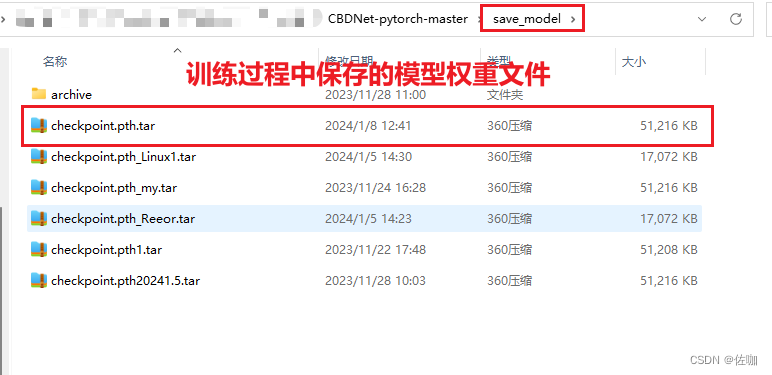
4.5 保存模型权重
训练过程中的模型权重文件会自动保存到根目录下的save_model文件夹中,如下:
五、推理测试
5.1 单帧测试
5.1.1 命令方式
如果只测试一张图片,在终端中输入下面命令:
python predict.py input_filename output_filename
其中input_filename是包含路径的图片名,output_filename是包含保存路径的图片名。实际例子命令如下:
python predict.py Test_Image/ETDS_GaoDe_X4_bmp/4_ETDS_M7C48_x4.bmp Result_image/whq/4_Train_ETDS_M7C48_x4_Denoise.bmp
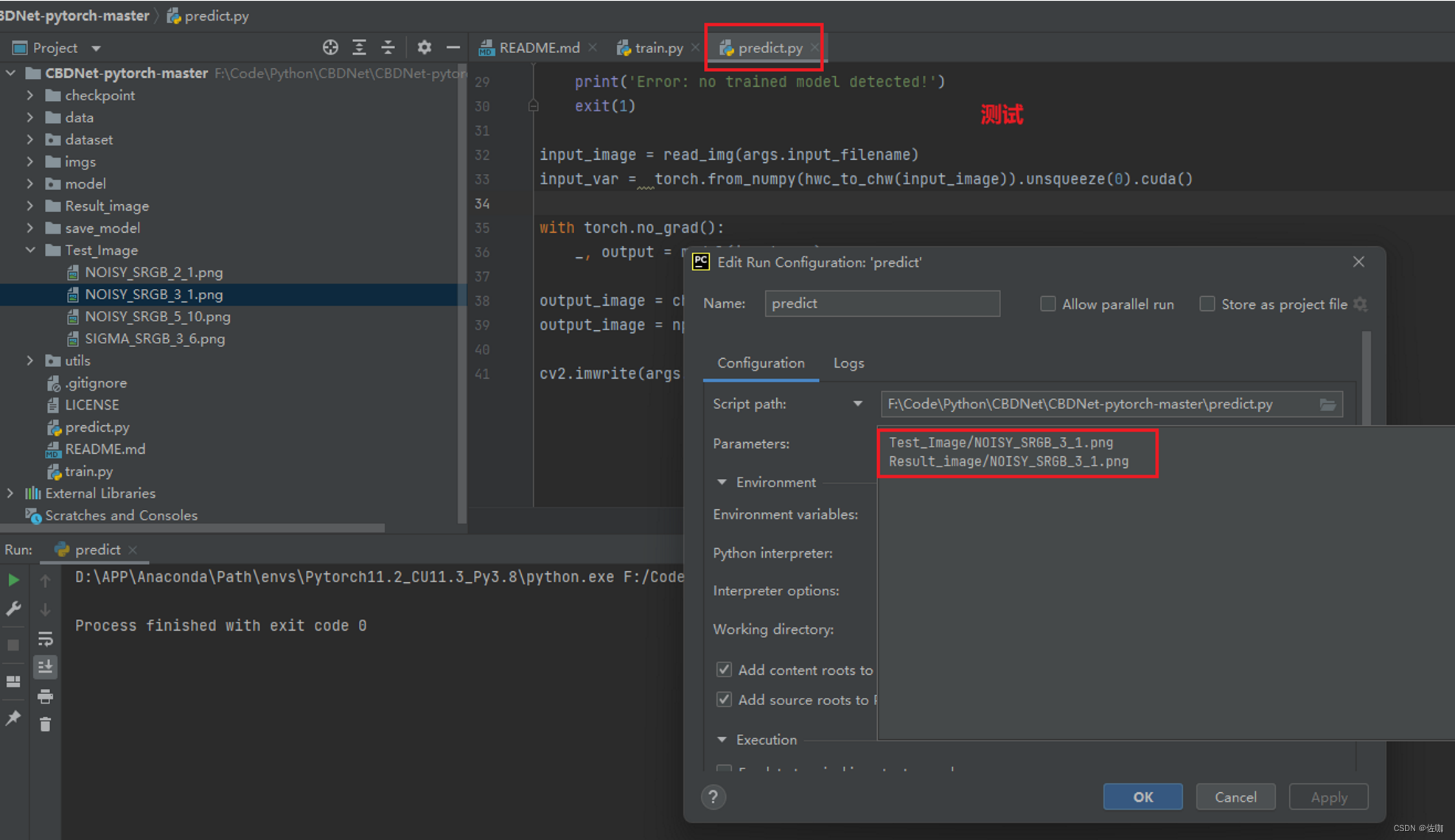
5.1.2 参数配置方式
如果开发编译环境使用的是Pycharm,也可以使用Configuration参数配置方式测试,如下:
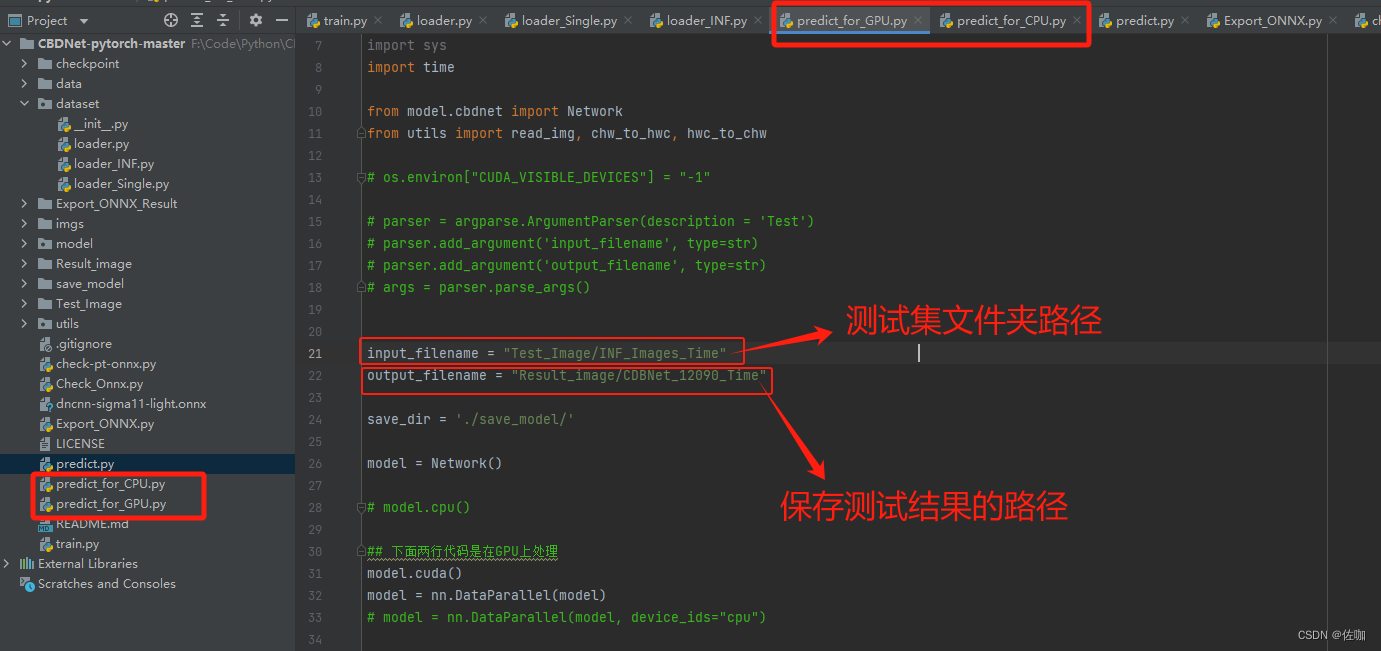
5.2 多帧遍历文件夹测试
如果想直接批量测试一个文件夹中的多张图片,运行我提供的脚本,其中predict_for_CPU.py是CPU批量处理的脚本,predict_for_GPU.py是GPU批量处理的脚本。分为两个脚本是为了下一步的推理时间测试。
批量测试的脚本具体使用如下:
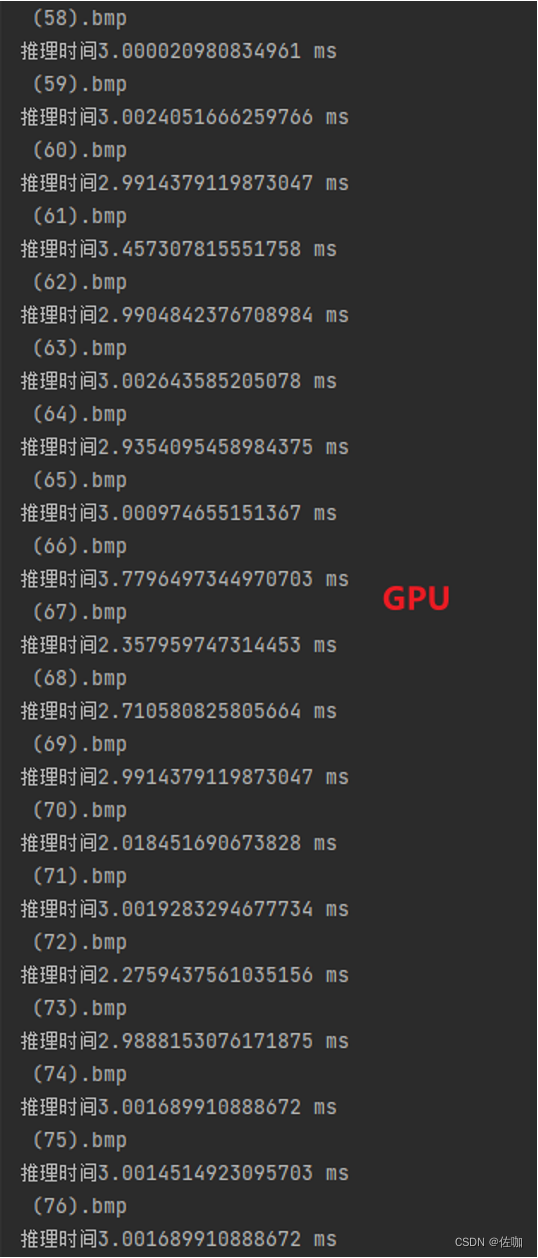
5.3 推理速度
5.3.1 GPU
GPU测试环境:Nvidia GeForce RTX 3050,测试图片96*96,推理时间:2.8ms/fps
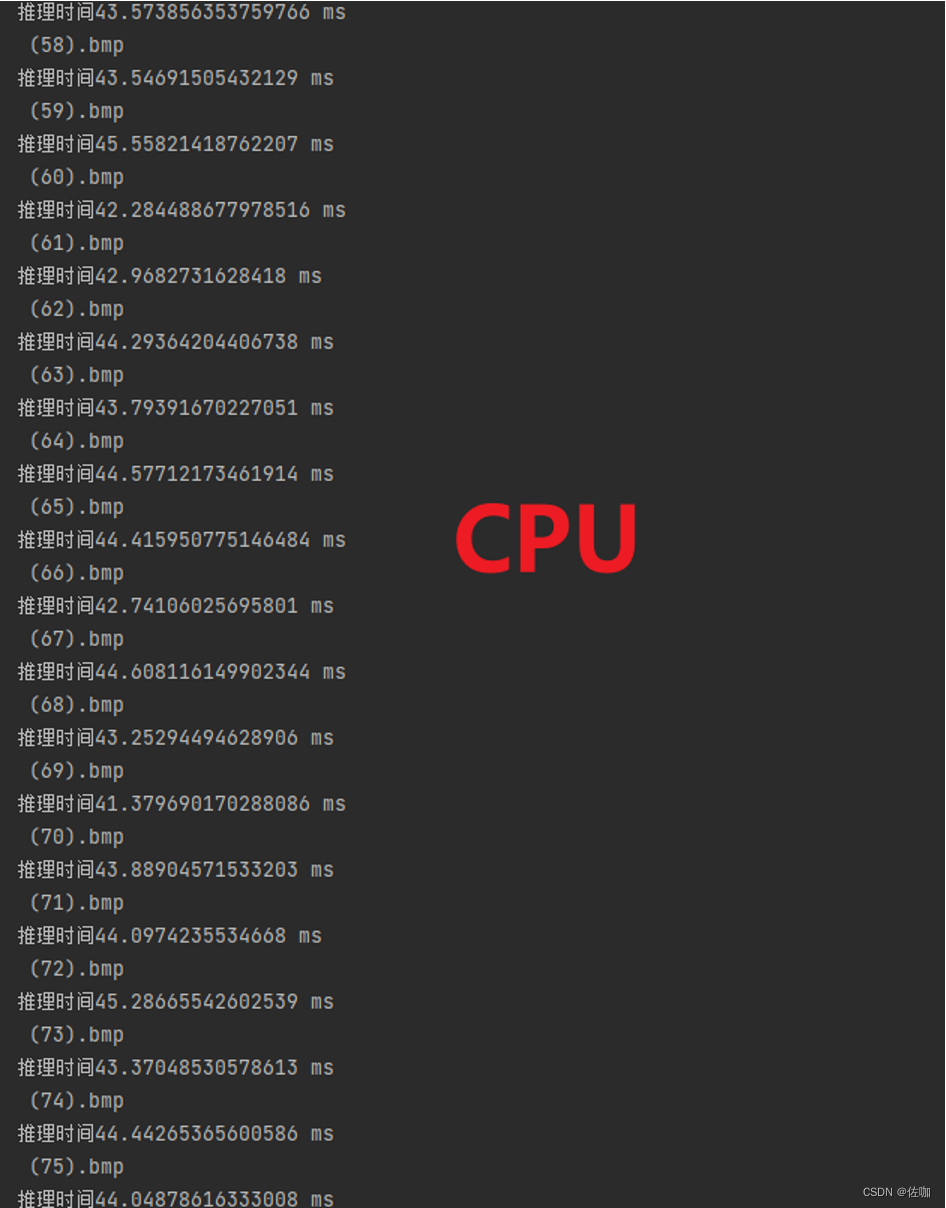
5.3.2 CPU
测试环境:12th Gen Intel? Core? i7-12700H 2.30 GHz,测试图片96*96,推理速度:43.61ms/fps
六、转ONNX
为方便部署,将上面训练好的模型权重文件转为ONNX中间格式。
6.1 转换代码
import torch
import torch.nn as nn
import onnx
import numpy as np
from onnx import load_model, save_model
from onnx.shape_inference import infer_shapes
# from models_DnCNN import DnCNN
from model.cbdnet import Network
# 加载模型
# dncnn_model = DnCNN(input_chnl=1, groups=1)
# dncnn_model = torch.load("./model_DnCNN_datav1-sigma11/model_DnCNN_datav1_epoch_500.pth")["model"]
# dncnn_model.load_state_dict(torch.load("./model_DnCNN_datav1/model_DnCNN_datav1_best.pth", map_location="cuda:1")["model"].state_dict())
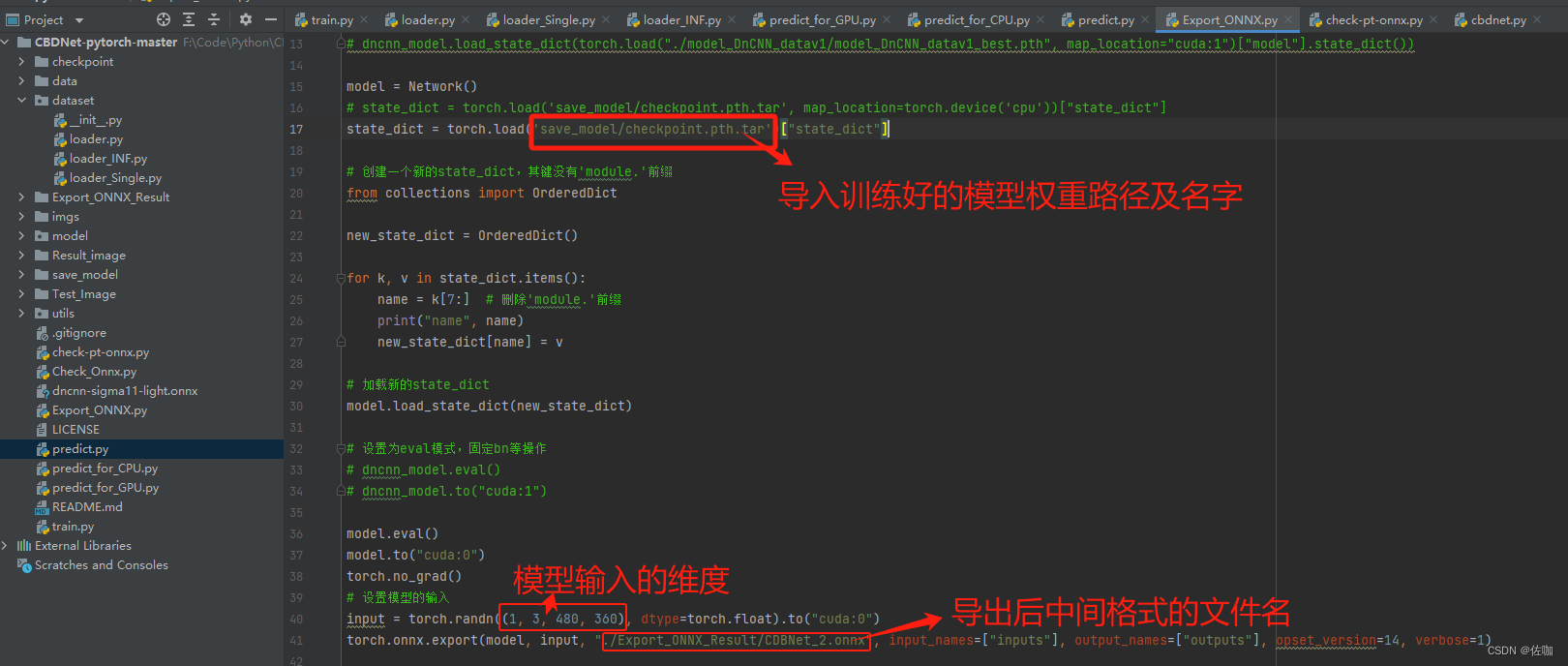
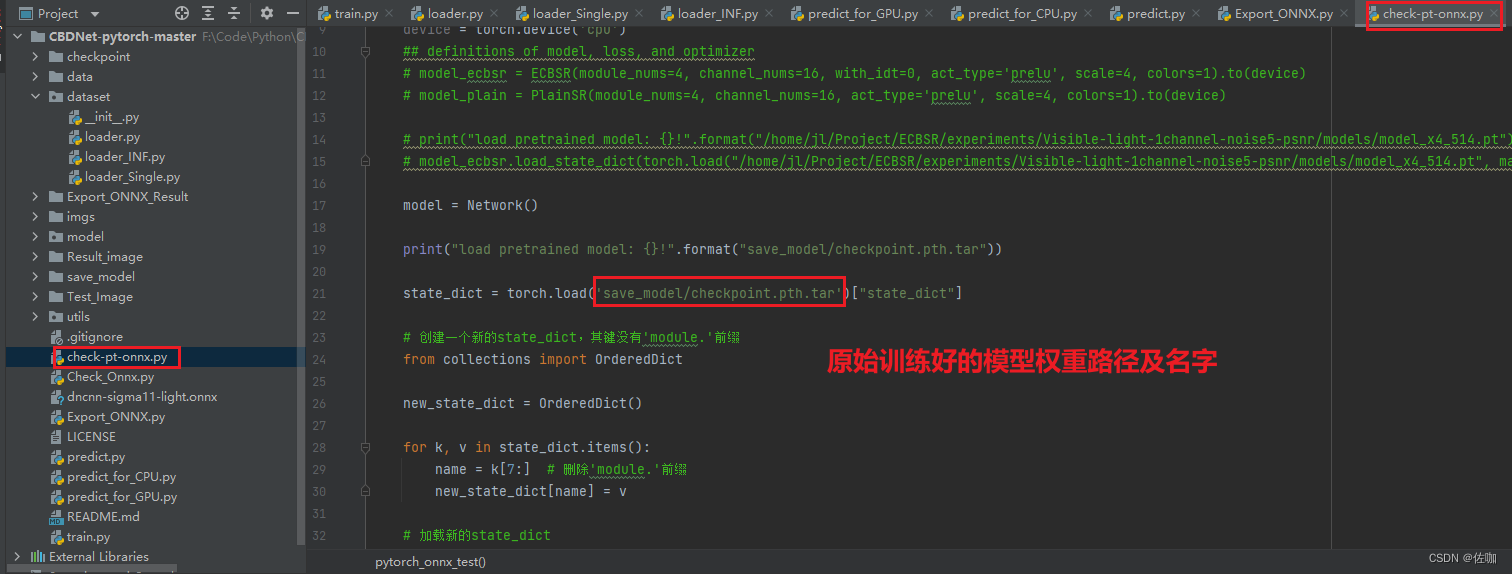
model = Network()
# state_dict = torch.load('save_model/checkpoint.pth.tar', map_location=torch.device('cpu'))["state_dict"]
state_dict = torch.load('save_model/checkpoint.pth.tar')["state_dict"]
# 创建一个新的state_dict,其键没有'module.'前缀
from collections import OrderedDict
new_state_dict = OrderedDict()
for k, v in state_dict.items():
name = k[7:] # 删除'module.'前缀
print("name", name)
new_state_dict[name] = v
# 加载新的state_dict
model.load_state_dict(new_state_dict)
# 设置为eval模式,固定bn等操作
# dncnn_model.eval()
# dncnn_model.to("cuda:1")
model.eval()
model.to("cuda:0")
torch.no_grad()
# 设置模型的输入
input = torch.randn((1, 3, 480, 360), dtype=torch.float).to("cuda:0")
torch.onnx.export(model, input, "./Export_ONNX_Result/CDBNet_2.onnx", input_names=["inputs"], output_names=["outputs"], opset_version=14, verbose=1)
# torch.onnx.export(model, input, "./dncnn-sigma11-light.onnx", input_names=["inputs-jl"], output_names=["outputs-jl"], opset_version=14, verbose=1,
# dynamic_axes={"inputs-jl":{2:"inputs_height", 3:"inputs_weight"}, "outputs-jl":{2:"outputs_height", 3:"outputs_weight"}})
print("Model has benn converted to onnx")
# onnx_model = load_model("./dncnn-sigma11.onnx")
# onnx_model = infer_shapes(onnx_model)
# save_model(onnx_model, "dncnn-sigma11-shape.onnx")
转后得到的中间格式如下:
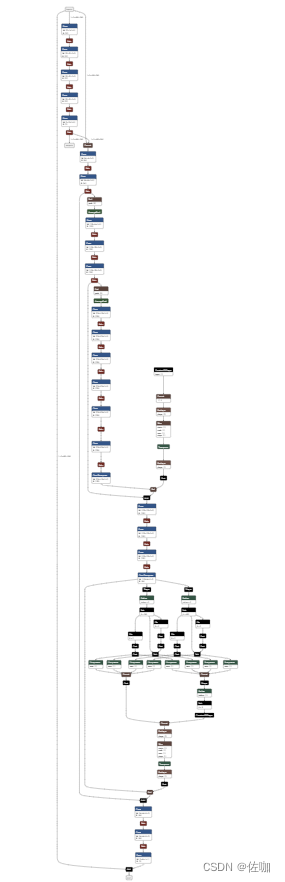
6.2 可视化网络结构
可视化网络结构,使用Netron,网址:Netron
打开网络结构如下:
6.3 检验转换后的ONNX模型是否正确
输入同样的数据到转换后的ONNX模型中和原始训练好的模型中,比较两模型的输出差值大不大,在接受范围内就说明转换成功。使用方法及检验代码如下:
检验代码为:
import torch
import numpy as np
import onnxruntime
# from models.ecbsr import ECBSR
# from models.plainsr import PlainSR
from model.cbdnet import Network
def torch_model():
device = torch.device('cpu')
## definitions of model, loss, and optimizer
# model_ecbsr = ECBSR(module_nums=4, channel_nums=16, with_idt=0, act_type='prelu', scale=4, colors=1).to(device)
# model_plain = PlainSR(module_nums=4, channel_nums=16, act_type='prelu', scale=4, colors=1).to(device)
# print("load pretrained model: {}!".format("/home/jl/Project/ECBSR/experiments/Visible-light-1channel-noise5-psnr/models/model_x4_514.pt"))
# model_ecbsr.load_state_dict(torch.load("/home/jl/Project/ECBSR/experiments/Visible-light-1channel-noise5-psnr/models/model_x4_514.pt", map_location='cpu'))
model = Network()
print("load pretrained model: {}!".format("save_model/checkpoint.pth.tar"))
state_dict = torch.load('save_model/checkpoint.pth.tar')["state_dict"]
# 创建一个新的state_dict,其键没有'module.'前缀
from collections import OrderedDict
new_state_dict = OrderedDict()
for k, v in state_dict.items():
name = k[7:] # 删除'module.'前缀
new_state_dict[name] = v
# 加载新的state_dict
model.load_state_dict(new_state_dict)
return model
## copy weights from ecbsr to plainsr
# depth = len(model_ecbsr.backbone)
# for d in range(depth):
# module = model_ecbsr.backbone[d]
# act_type = module.act_type
# RK, RB = module.rep_params()
# model_plain.backbone[d].conv3x3.weight.data = RK
# model_plain.backbone[d].conv3x3.bias.data = RB
#
# if act_type == 'relu': pass
# elif act_type == 'linear': pass
# elif act_type == 'prelu': model_plain.backbone[d].act.weight.data = module.act.weight.data
# else: raise ValueError('invalid type of activation!')
# return model_ecbsr
def pytorch_out(input):
model = torch_model() #model.eval
# input = input.cuda()
# model.cuda()
torch.no_grad()
model.eval()
output = model(input)
# print output[0].flatten()[70:80]
out1 = output[0]
out2 = output[1]
out = torch.stack((out1, out2))
return out
def pytorch_onnx_test():
def to_numpy(tensor):
return tensor.detach().cpu().numpy() if tensor.requires_grad else tensor.cpu().numpy()
# 测试数据
torch.manual_seed(66)
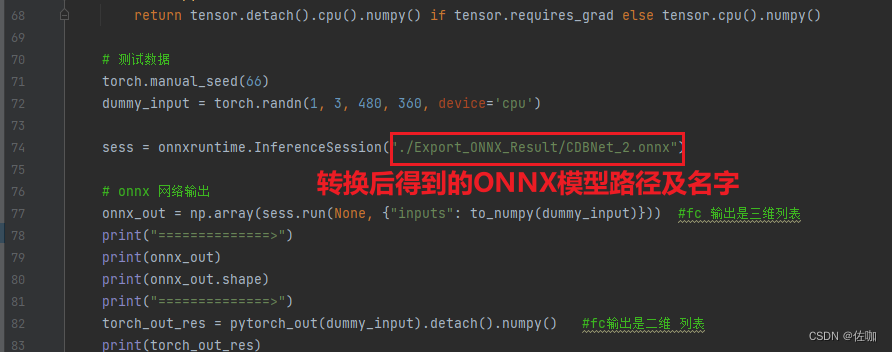
dummy_input = torch.randn(1, 3, 480, 360, device='cpu')
sess = onnxruntime.InferenceSession("./Export_ONNX_Result/CDBNet_2.onnx")
# onnx 网络输出
onnx_out = np.array(sess.run(None, {"inputs": to_numpy(dummy_input)})) #fc 输出是三维列表
print("==============>")
print(onnx_out)
print(onnx_out.shape)
print("==============>")
torch_out_res = pytorch_out(dummy_input).detach().numpy() #fc输出是二维 列表
print(torch_out_res)
print(torch_out_res.shape)
print("===================================>")
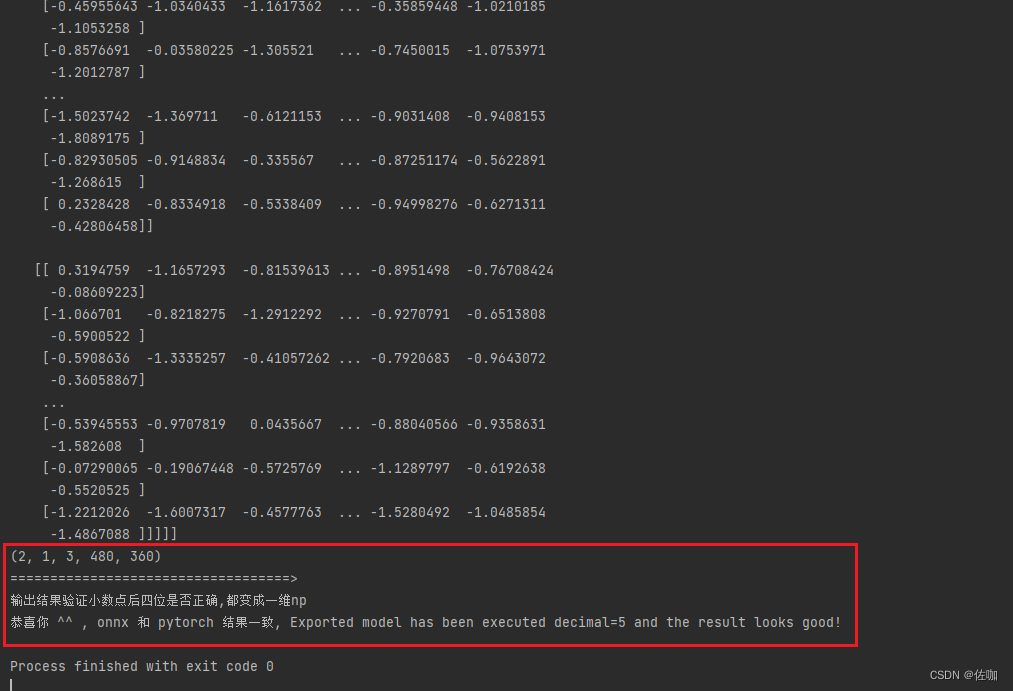
print("输出结果验证小数点后四位是否正确,都变成一维np")
torch_out_res = torch_out_res.flatten()
onnx_out = onnx_out.flatten()
pytor = np.array(torch_out_res,dtype="float32") #need to float32
onn=np.array(onnx_out,dtype="float32") ##need to float32
np.testing.assert_almost_equal(pytor,onn, decimal=5) #精确到小数点后4位,验证是否正确,不正确会自动打印信息
print("恭喜你 ^^ , onnx 和 pytorch 结果一致, Exported model has been executed decimal=5 and the result looks good!")
pytorch_onnx_test()
运行上面代码后,输出如下,则说明ONNX模型转换成功,可以直接放到其它平台部署了。
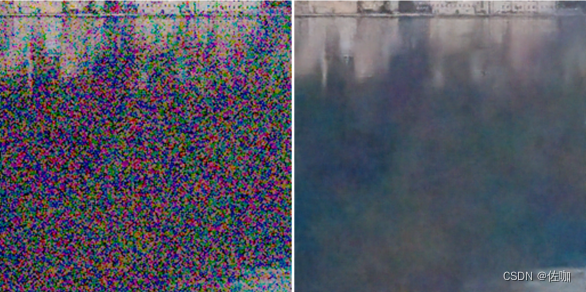
七、测试结果
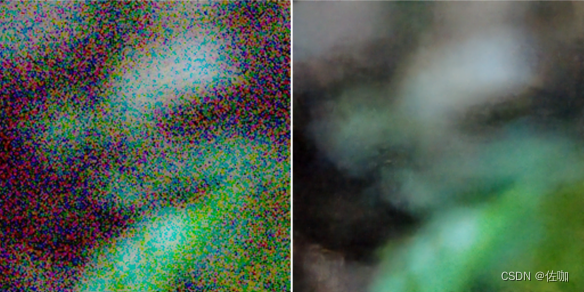
7.1 测试场景1
7.2 测试场景2

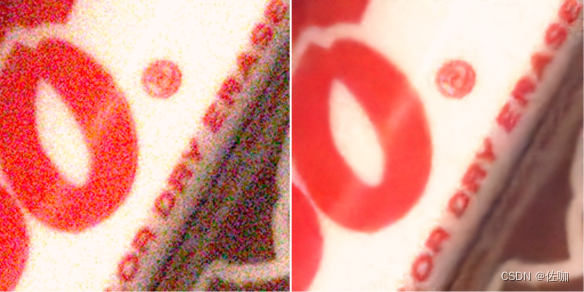
7.3 测试场景3
7.4 测试场景4
八、总结
以上就是图像去噪CBDNet网络训练自己数据集及推理测试,并将训练好的模型转ONNX模型的详细实现过程。网络架构需要花些时间解读,学者仔细研究。
总结不易,多多支持,谢谢!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2023年泰迪杯数据分析赛a题解析(一)
- 机器人制作开源方案 | 多地形适应野外探索智能车
- 你好!Apache Seata
- 深入剖析Spring源码系列-Spring事务原理(上)
- 2024,AI Agent的密集爆发之年
- 数据结构学习 jz56数组中数字出现的次数
- 全罐喂养一天吃多少?宠物店自用适合猫咪全罐喂养的猫罐头推荐
- python数字图像处理基础(八)——harris角点检测、图像尺度空间、SIFT算法
- I2C总线(一)核心
- JavaScript中的生成器与迭代器详解