MATLAB - 四元数(quaternion)
发布时间:2023年12月23日
系列文章目录
前言
一、简介
四元数是一种四元超复数,用于三维旋转和定向。
四元数的表示形式为 a+bi+cj+dk,其中 a、b、c 和 d 为实数,i、j 和 k 为基元,满足等式:i2 = j2 = k2 = ijk =-1。
四元数集用 H 表示,定义在实数的四维向量空间 R4 中。H 中的每个元素都有一个基于基元素 i、j 和 k 线性组合的唯一表示。
三维空间中的所有旋转都可以用旋转轴和围绕该轴的角度来描述。与旋转矩阵相比,四元数的优势在于旋转轴和旋转角度易于解释。例如,考虑 R3 中的一个点。要旋转该点,需要定义一个旋转轴和一个旋转角度。
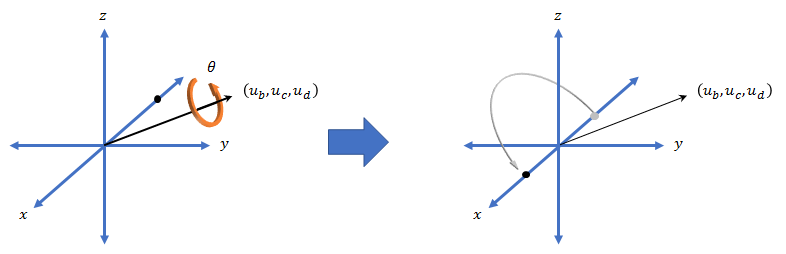
旋转的四元数表示可表示为 ,其中 θ 是旋转角度,[ub、uc 和 ud] 是旋转轴。) ,其中 θ 是旋转角度,[ub、uc 和 ud] 是旋转轴。
二、MATLAB 用法?
quat = quaternion()
quat = quaternion(A,B,C,D)
quat = quaternion(matrix)
quat = quaternion(RV, "rotvec")
quat = quaternion(RV, "rotvecd")
quat = quaternion(RM, "rotmat",PF)
quat = quaternion(E, "euler",RS,PF)
quat = quaternion(E, "eulerd",RS,PF)
quat = quaternion(transformation)
quat = quaternion(rotation)?三、四元数的优点
1.非奇异表达(和例如欧拉角之类的表示相比)
2.比矩阵更紧凑(更快速)
3.单位四元数的对可以表示四维空间中的一个转动。
文章来源:https://blog.csdn.net/weixin_46300916/article/details/135162885
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 十一.约束(一)
- 前端面试题(计算机网络):什么是HTTP状态码304?状态码304多好还是少好?
- 记录Oracle Exadata X8M-2 存储服务器告警灯亮的处理过程(/SYS/MB/P0&PCIE7)
- kubernetes(k8s) Yaml 文件详解
- 2.4 DEVICE GLOBAL MEMORY AND DATA TRANSFER
- MySQL - 创建表的三种方法详解及练习
- 记录来到这的第一天!
- 【2023最新版】Wireshark安装保姆级教程(超详细),及简单使用Wireshark抓包
- js逆向第16例:猿人学第12题入门级js
- 【经验分享】日常开发中的故障排查经验分享(一)