RAL论文:一种自感知扭转塔折纸软体机器人
折纸是一种以纸张折成各种不同形状的艺术活动。折纸与自然科学结合在一起,不仅成为建筑学院的教具,还发展出了折纸几何学成为现代几何学的一个分支。根据折痕的不同分布,可以将纸张折叠成不同的形状,例如有许多经典的折纸结构:Miura、Yoshimura、Water Bomb和Kresling……
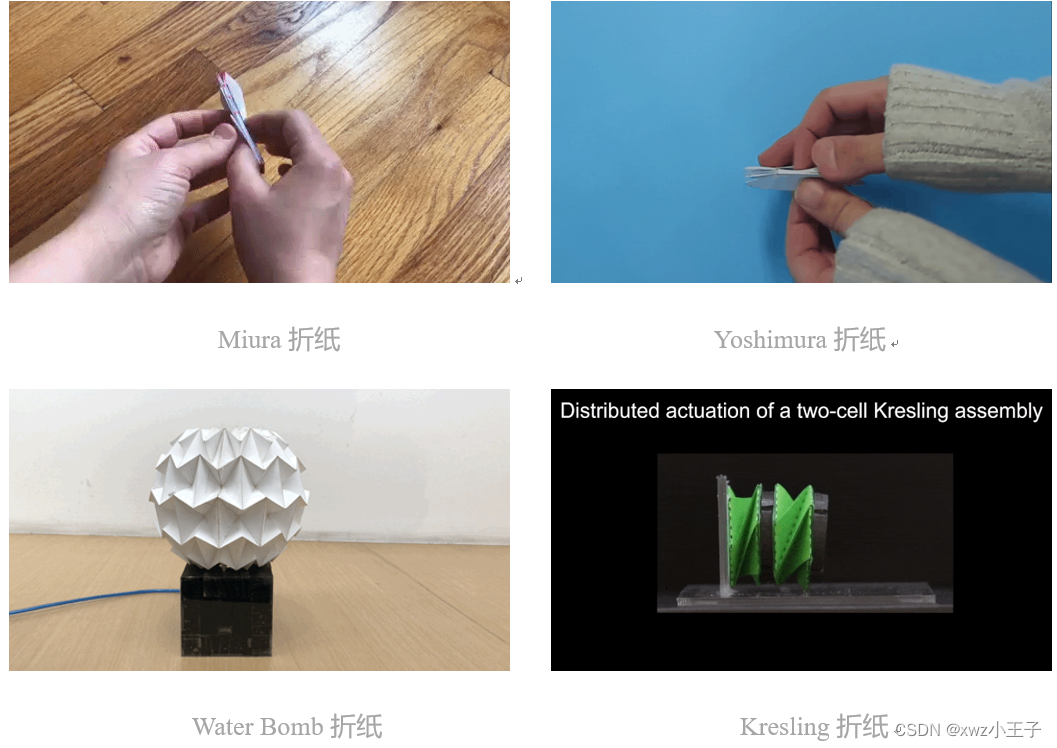
折纸结构已经在不同的领域得到了应用,例如折纸建筑、折叠电池、飞船太阳能板,折纸机器人,艺术剪纸,医疗折叠病床等。随着软体机器人逐渐成为研究热点,折纸结构也开始应用于软体机器人设计。只要想象力足够,平平无奇的纸张可以变换出无数有趣的玩意儿。
目前,刚性机器人中使用的传统可靠和模块化传感器已经发展得较为成熟,软体机器人需要新的感知解决方案。然而,由于软体机器人制备材料的柔软性和结构顺应性,给软体机器人的传感和控制带来了挑战。
结合在软体机器人、折纸结构和自感知方面的挑战,研究人员提出了一种基于柔性织物压敏材料的自感知扭转塔折纸结构致动器,该研究由南京信息工程大学杨扬团队联合香港中文大学、华南理工大学学者共同完成,研究得到了国家自然科学基金及香港研究资助委员会基金资助,相关成果以“Self-sensing Origami-inspired Soft Twisting Actuators and Its Application in Soft Robots”为题发表于期刊《IEEE ROBOTICS AND AUTOMATION LETTERS》。
▍设计原理
该论文受折纸启发,采用3D打印技术设计了一种扭转塔致动器,在真空压力驱动下,致动器可以实现扭转和收缩的复合运动,扭转方向与倾斜边的方向一致。

扭转塔折纸结构致动器的结构与原理
传感单元为柔性织物压敏材料(Velostat),它是一种聚合物材料,含有大量的碳黑颗粒,从而赋予了材料导电性。当施加压力或变形时,电阻会发生变化。在负压驱动下,随着扭转角度的增加,致动器曲面的凹陷程度增加,位置传感器受到的载荷增加,引发阻值变化。传感器的阻值通过分压电路进行实时测量。
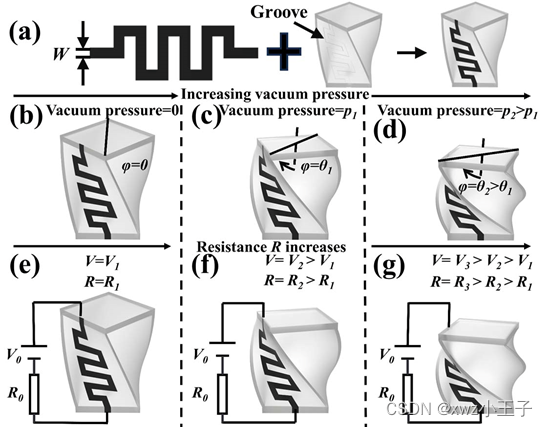
传感器的工作原理
▍实验验证
实验表明,自感知扭转致动器的扭转角度-阻值变化近似成线性关系,证明通过位置传感器的阻值变化可有效感知执行器的扭转角度。同时,在负压驱动下,有/无传感器的致动器的变化趋势相同,表明将柔性织物作为传感器添加到致动器中不会破坏其固有的顺应性。在循环实验中,阻值峰值的相对变化幅度小于5%,位置传感器在连续变形下表现出良好的循环重复性。
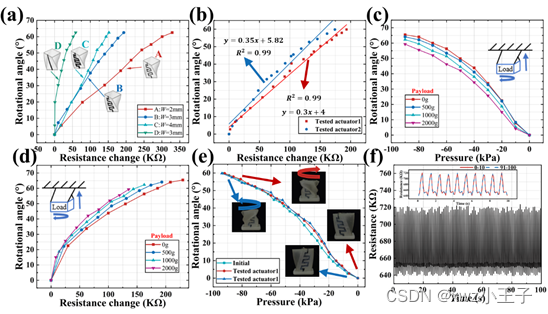
自感知致动器的性能表征
▍应用展示
基于自感知扭转致动器,设计了柔性抓手、机械臂和六足机器人。结合反馈控制,致动器的扭转角度得到控制,从而精确抓取易碎的物体; 通过不同的驱动策略,机械臂可以完成拧瓶盖、安装灯泡等任务; 通过反馈控制将棱柱放置到凹槽内,即使中途改变凹槽位置,机械臂仍能完成任务; 六足机器人能够对运动步态和运动速度进行监测,并且可以检测前方障碍物。
▍结论
本文集成了扭转塔致动器和柔性织物压敏材料,设计了具有自感知功能的扭转折纸致动器。自感知扭转致动器可以应用于实现一些需要闭环控制的软体机器人,包括本文的柔性抓手,柔性机械臂和六足机器人。该论文提出的设计思想对开发自感知软体致动器和软体机器人具有参考意义。
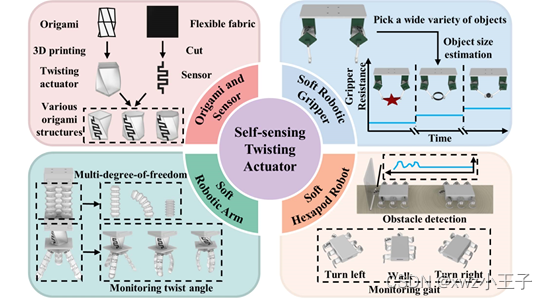
提出的自感知扭转塔折纸结构致动器及其在软体机器人上的应用
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- c++ qt 窗口开发中 俩按钮组合 配合 显影 已解决
- YOLOv5:将模型预测结果保存为Labelme格式的Json文件
- 项目中常用的lodash库方法
- 低代码开发的困境与解药
- 单元测试之道
- ALVR 编译 windwos && android [Streamer &Client]
- pip 常用指令 uninstall 命令用法介绍
- 《HTML5网页设计》——排列页面内容
- Codeforces Round 920 (Div. 3) F题 根号分治,后缀和,后缀和的后缀和
- SearchWP WordPress高级网站内容搜索插件(包含所有专业扩展)