3 -灰度变换和空间滤波
本章目标:
- 理解空间域处理(spatial domain processing)的意义,以及与变换域处理(transform domain processing)的区别
- 熟悉灰度变换(intensity transformations)所用的主要技术
- 理解图像直方图(image histograms)的物理意义,以及如何被用于图像增强(image enhancement)
- 理解空间滤波(spatial filtering)的机制,以及如何形成
- 理解解空间卷积和相关(spatial convolution and correlation)的主要原理
- 熟悉空间滤波的主要类型,以及如何被运用
- 理解空间滤波之间的关系,低通滤波的基本作用
- 当单一图像增强方法(enhancement methods)失效的情况下,学习组合使用多种图像增强方法
目录
一、背景
本章讨论的所有图像处理技术都基于空间域——对图像像直接操作
1.1 灰度变换和空间滤波基础
一些概念重申:
- 亮度: 图像的明暗程度,灰度值越大越亮,反之,越暗
- 对比度: 图像中最大灰度值与最小灰度值之间的差值
- 饱和度: 图像上的颜色种类个数有多少,越多该值越高,图片看上去很鲜艳,反之,图片看上去不自然
- 分辨率: 单位长度内包含的像素个数 ,越大,图片越清晰
g
(
x
,
y
)
=
T
[
f
(
x
,
y
)
]
g(x,y) = T[f(x,y)]
g(x,y)=T[f(x,y)]
上述式子将贯穿本章,其中 :
- f ( x , y ) f(x,y) f(x,y)是输入图片, g ( x , y ) g(x,y) g(x,y)是输出图片, T T T是一个关于像素点 ( x , y ) (x,y) (x,y)邻域的运算算子
- 算子 T T T可以作用于单张图片上的像素点(pixels of a single image),也可以作用于多张图片上的像素点(pixels of a set of images)
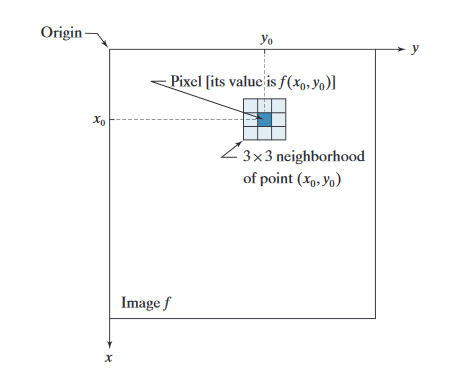
- 像素点 ( x 0 , y 0 ) (x_0,y_0) (x0?,y0?)是一幅图像中的任意位置(arbitrary location)
- 上述坐标中,以该像素点为中心的 3 × 3 3 \times 3 3×3 正方形【一般是矩形 rectangular】就为该点的邻域(neighborhood)
最小的邻域为
1
×
1
1 \times 1
1×1 , 此时
T
T
T就为灰度(灰度级 gray-level 或映射 mapping)变换函数transformation function——结果仅取决于点的灰度(又称点处理技术point processing techniques,反之邻域处理技术neighborhood processing techniques) , 上述式子可以简化为
s
=
T
(
r
)
s = T(r)
s=T(r)
此时,用 s s s 和 r r r分别表示 g g g 和 f f f在任意位置 ( x , y ) (x,y) (x,y)的灰度值
灰度变换函数(intensity transformation) T T T小总结:
- 直接对原图进行操作——空间域;是对单个像素点操作——点操作
- 主要目的是进行图像增强
- 改善图片质量,显示更多细节,提高图像对比度
- 有选择的突出图像中感兴趣的特征,抑制不需要的特征
- 有效改变图像的直方图分布,使像素的分布更均匀
二、一些基本的灰度变换函数
灰度变换函数类型:
- 线性变换 —— 连续和分段函数
- 非线性变换 —— 对数logarithmic和幂律函数 power-law
注: 一幅图像的灰度范围为 [ L m i n , L m a x ] [L_{min},L_{max}] [Lmin?,Lmax?]
2.1 线性灰度变换
2.1.1 连续函数
作用: 对图像的对比度和亮度进行调整
s
=
a
×
r
+
b
s = a \times r + b
s=a×r+b
a a a影响对比度, b b b影响亮度
?? 1.
a
>
1
a > 1
a>1 : 增强对比度
?? 2.
a
<
1
a < 1
a<1 : 降低对比度
?? 3.
b
>
0
b > 0
b>0 : 增加图像亮度
?? 4.
b
<
0
b < 0
b<0 : 降低图像亮度
?? 5.
a
=
?
1
,
b
=
L
m
a
x
a =-1,b = L_{max}
a=?1,b=Lmax? : 图像翻转IMAGE NEGATIVES
2.1.2 分段函数
作用: 增强图像中感兴趣区域的灰度值,而抑制不感兴趣的灰度区域。通用公式如下:
s
=
{
s
1
r
1
?
r
,
r
<
r
1
s
2
?
s
1
r
2
?
r
1
?
(
r
?
r
1
)
,
r
1
≤
r
≤
r
2
255
?
s
2
255
?
r
2
?
(
r
?
r
2
)
,
r
>
r
2
s = \begin{cases} \dfrac{s_1}{r_1} *r,r < r_1\\ \dfrac {s_2 - s_1}{r_2 - r_1}*(r-r_1),r_1 \leq r \leq r_2 \\ \dfrac{255-s_2}{255-r_2}*(r- r_2) ,r>r_2\end{cases}
s=?
?
??r1?s1???r,r<r1?r2??r1?s2??s1???(r?r1?),r1?≤r≤r2?255?r2?255?s2???(r?r2?),r>r2??
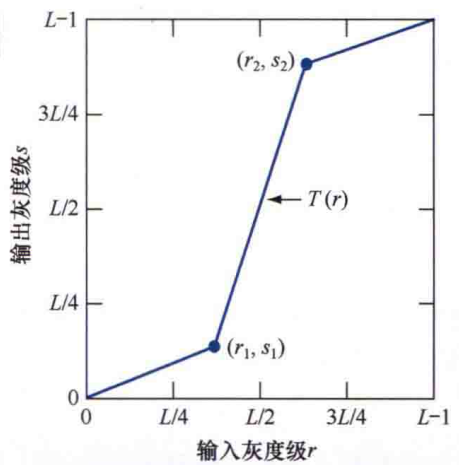
- 对比拉伸函数 contrast stretching function
作用: 将原图的灰度范围限制为自定义范围,增强感兴趣区域
r_min, r_max = 255, 0
for i in range(image.shape[0]):
for j in range(image.shape[1]):
for k in range(image.shape[2]):
if image[i, j, k] > r_max:
r_max = image[i, j, k]
if image[i, j, k] < r_min:
r_min = image[i, j, k]
r1, s1 = r_min, 0
r2, s2 = r_max, 255
k1 = s1/r1
k3 = (255-s2)/(255-r2)
k2 = (s2 - s1)/(r2 - r1)
precewise_img = np.zeros((image.shape[0], image.shape[1], 3), dtype=np.float32)
for i in range(image.shape[0]):
for j in range(image.shape[1]):
for k in range(image.shape[2]):
if r1 <= image[i, j, k] <= r2:
precewise_img[i, j, k] = k2*(image[i, j, k] - r1)
elif image[i, j, k] < r1:
precewise_img[i, j, k] = k1*image[i, j, k]
elif image[i, j, k] > r2:
precewise_img[i, j, k] = k3*(image[i, j, k] - r2)
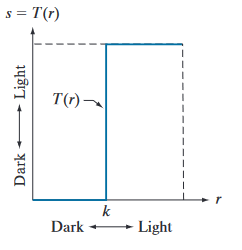
- 阈值处理函数 thresholding function
当 r 1 = r 2 , s 1 = 0 , s 2 = L m a x r_1=r_2, s_1=0, s_2=L_{max} r1?=r2?,s1?=0,s2?=Lmax?时——上述的极限情况,此时分段线性函数便是阈值处理函数: K K K以下是黑色,以上是白色——产生一幅二级(值)图像a two level (binary) image
3. 灰度级分层 Intensity-Level Slicing
作用:
?? a) 可以将感兴趣取悦内的所有灰度值显示为一个值,而将其他区域的显示为另一个值——得到二值图像;
??b)可以将感兴趣区域变亮(或变暗),但保持图像中其他灰度值不变
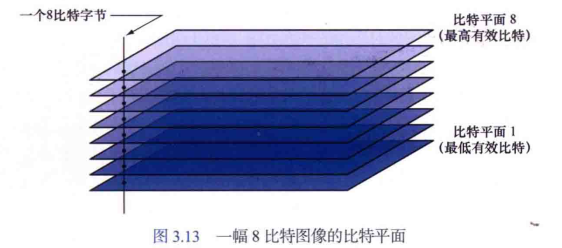
- 比特平面分层 Bit-Plane Slicing
- 灰度值是由比特组成的整数,如在一幅256(0~255)级灰度图象中,一个灰度值由8比特( 2 8 2^8 28)组成,此时可以称这幅图为8比特图
- x x x比特图像可由 x x x个1比特平面组成,每个比特平面都是一个二值图像,比如8比特图像由8个1比特平面组成
- 最高有效的4个平面(尤其是其中较高的两个平面)包含大量具有视觉意义的数据
注:具体运算: https://blog.csdn.net/lxw234lxw/article/details/124022059
作用:
?? 1. 用来进行图像压缩 image compression
?? 2. 用来进行图像重建——存储4个最高有效比特平面,就能以可接受的细节和色调重建原图像【重建 reconstruction: 将第n个平面的像素乘以
2
n
?
1
2^{n-1}
2n?1,再将得到的所有平面相加】
2.2 非线性灰度变换
2.2.1 对数函数
作用: 压缩像素值的动态范围,将图像的低灰度值部分扩展,高灰度值部分压缩—— 对图像中低灰度值(暗)的细节进行增强
注: 反对数(指数)函数功能相反
s = c l o g ( 1 + r ) s = clog(1+r) s=clog(1+r)
precewise_img = np.zeros((image.shape[0], image.shape[1], 3), dtype=np.float32)
for i in range(img.shape[0]):
for j in range(img.shape[1]):
for k in range(image.shape[2]):
precewise_img[i][j][k] = math.log(1+img[i][j][k])
# 归一化以及转回np.unit8
cv2.normalize(precewise_img, precewise_img, 0, 255, cv2.NORM_MINMAX)
img = cv2.convertScaleAbs(precewise_img)
2.2.2 幂律函数
作用:主要用于图像的校正,
??1. 可以对漂白的图片或过黑的图片进行修正,
??2. 可以增强对比度
s
=
c
r
γ
,
r
∈
[
0
,
1
]
s = cr^{\gamma},r \in [0,1]
s=crγ,r∈[0,1]
考虑到偏移,也将上述式子写成如下形式:
s
=
c
(
r
+
?
)
γ
s = c(r+\epsilon)^{\gamma}
s=c(r+?)γ
三、图像直方图
- 令 r k r_k rk?(k = 0,1,2,…,L-1)表示一幅 L 级灰度数字图像 f ( x , y ) f(x,y) f(x,y)的灰度
- M M M 和 N N N分别是图像的行数和列数
直方图 histogram: 关于图像灰度的函数,该函数的输出是图像中各个灰度级出现的次数或频率
- 非归一化直方图 unnormalized histogram :
h ( r k ) = n k , k = 0 , 1 , 2 , . . . , L ? 1 h(r_k) = n_k,k = 0,1,2,...,L-1 h(rk?)=nk?,k=0,1,2,...,L?1 - 归一化直方图 normalized histogram :
p ( r k ) = h ( r k ) M N = n k M N p(r_k) = \dfrac{h(r_k)}{MN} = \dfrac{n_k}{MN} p(rk?)=MNh(rk?)?=MNnk??
- 一般使用归一化直方图,将此直方图简单地称为直方图或图像直方图 histograms or image histograms
- p ( r k ) p(r_k) p(rk?)是对图像中出现的灰度级的概率的估计
- 直方图形状与图像外观相关
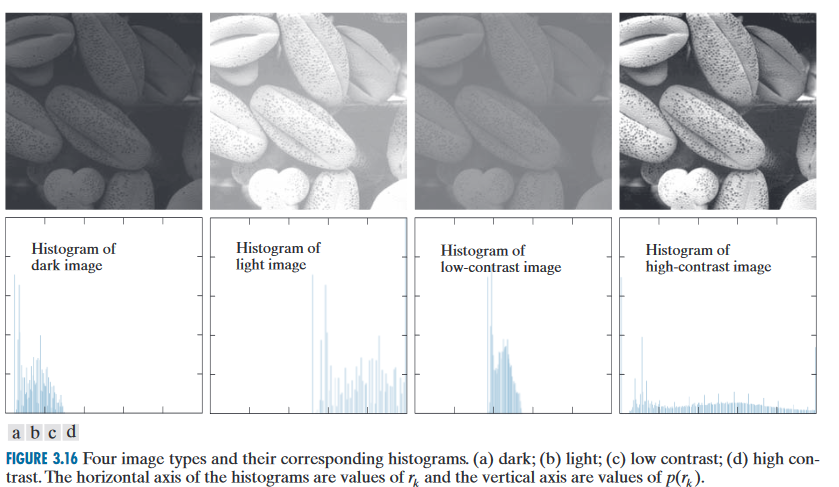
发现: 像素占据整个灰度级并且均匀分布的图像,将具有高对比度的外观和多种灰色调
3.1 直方图均衡化
直方图均衡化: 把原始图像的灰度直方图从比较集中的某个灰度区间 映射到 更广泛的灰度范围内的分布,且各灰度级的频次较为均衡——这样一幅图像中的各个位置都能看到,提高对比度
方法:
- 假设图像的初始灰度级是连续的,令 r r r 表示归一化的原图像, s s s为修正后的图像,有 0 ? r , s ? 1 0\leqslant r,s \leqslant 1 0?r,s?1,其中,0 表示为黑色,1 表示为白色
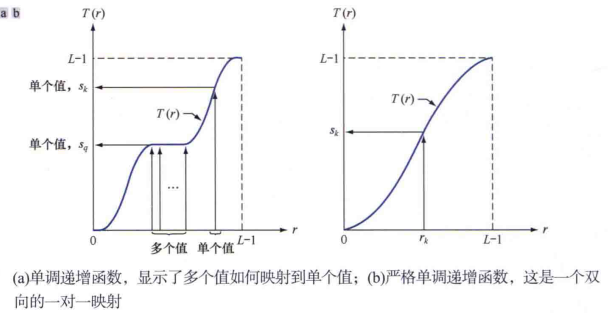
- 对 r r r 进行变换 : s = T ( r ) s = T(r) s=T(r),满足:
- T ( r ) T(r) T(r) 在区间 0 ? r ? 1 0\leqslant r \leqslant 1 0?r?1 内单调递增
- 在区间 0 ? r ? 1 0\leqslant r \leqslant 1 0?r?1 内,有 0 ? T ( r ) ? 1 0\leqslant T(r) \leqslant 1 0?T(r)?1
- 反变换同样满足上述两个条件
注:
- 第一个条件保证输出的灰度值从不小于对应的输入值——防止因灰度反转而产生伪像
- 第二个条件保证输出的范围同输入的范围相同
- 此外,如果将第一个条件改为严格单调递增,保证反变换的映射是一对一的
令
p
r
(
r
)
p_r(r)
pr?(r) 和
p
s
(
s
)
p_s(s)
ps?(s)表示原图和修改后图中灰度级的概率密度函数;概率论基本结论,已知
p
r
(
r
)
p_r(r)
pr?(r)和
T
(
r
)
T(r)
T(r),且
T
(
r
)
T(r)
T(r)连续可微,则
p
s
(
s
)
p_s(s)
ps?(s)可由
p
r
(
r
)
p_r(r)
pr?(r)和
T
(
r
)
T(r)
T(r)表示。推导如下:
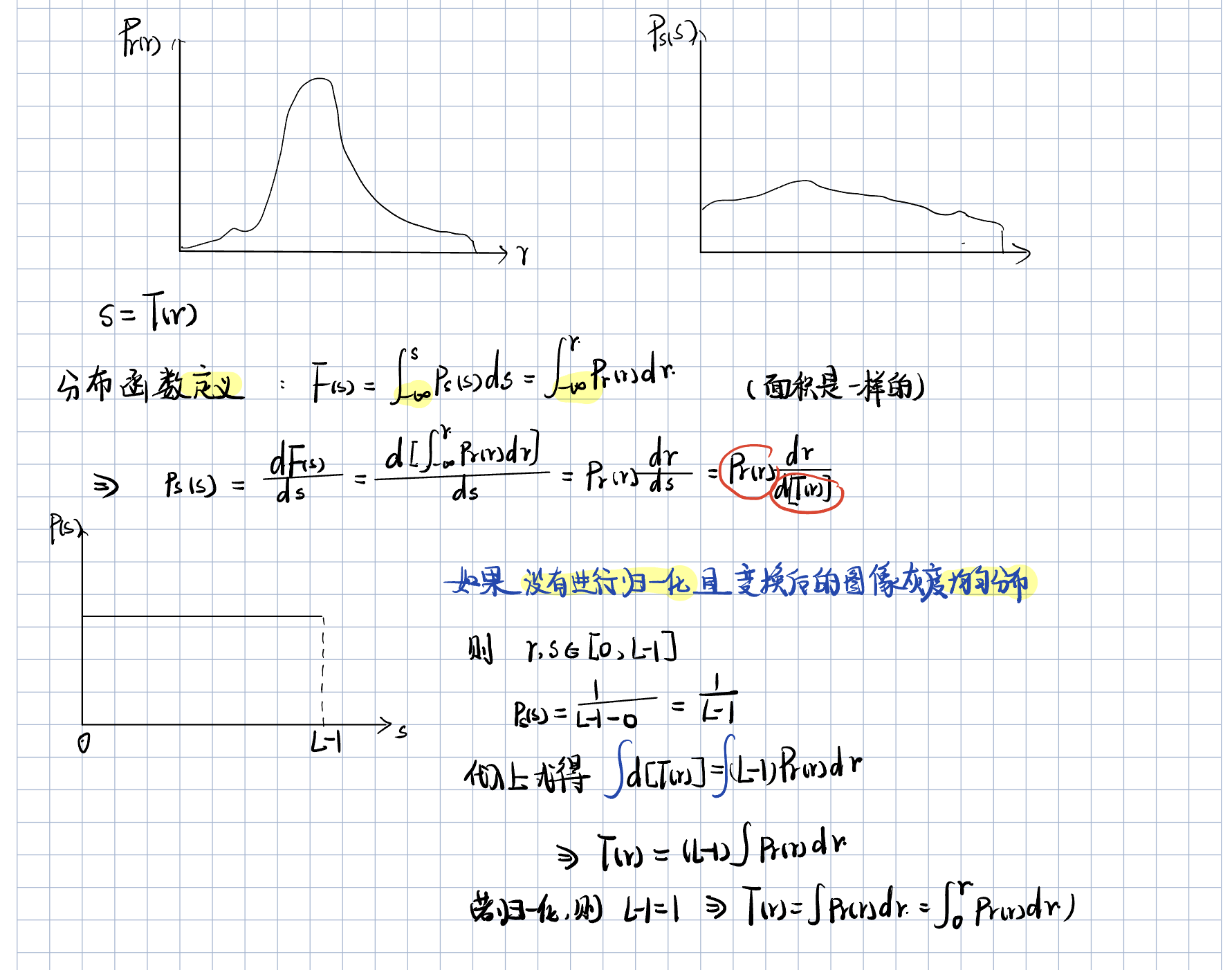
若图像的灰度值是离散的,则使用概率求和代替概率密度函数与积分:
p
r
(
r
k
)
=
n
k
M
N
p_r(r_k) =\dfrac{n_k}{MN}
pr?(rk?)=MNnk??
s
k
=
T
(
r
k
)
=
(
L
?
1
)
∑
j
=
0
k
p
r
(
r
j
)
,
k
=
0
,
1
,
2
,
.
.
.
,
L
?
1
s_k = T(r_k) = (L-1) \sum_{j=0}^kp_r(r_j),k = 0,1,2,...,L-1
sk?=T(rk?)=(L?1)j=0∑k?pr?(rj?),k=0,1,2,...,L?1
3.2 直方图匹配(规定化)
背景: 直方图均衡化可以根据输入图像的灰度级的概率密度函数自动 生成一个变换函数,继而得到一个直方图均匀分布的图像。但有时候,需要图像具有一特定的直方图形状
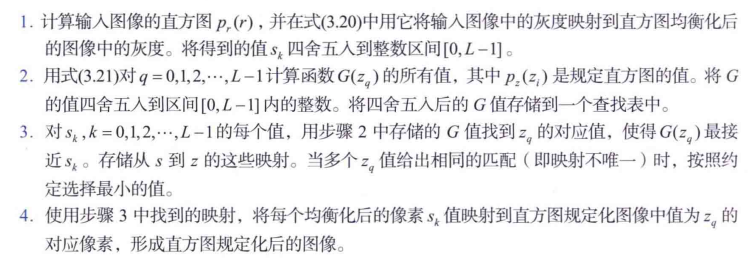
直方图匹配(规定化): 将原图像的直方图变换为指定的形式,而不只是均匀分布的直方图
方法:
- 假设图像的初始灰度级是连续的,令 p r ( r ) p_r(r) pr?(r) 和 p z ( z ) p_z(z) pz?(z) 分别为原始图像的灰度级概率密度、规定化后的概率密度
- 对原始图像进行直方图均衡化: s = T ( r ) = ( L ? 1 ) ∫ 0 r p r ( w ) d w s = T(r) =(L-1)\int_0^rp_r(w)dw s=T(r)=(L?1)∫0r?pr?(w)dw
- 对规定化的图像进行直方图均衡化: G ( z ) = T ( r ) = ( L ? 1 ) ∫ 0 z p z ( v ) d v G(z)= T(r) =(L-1)\int_0^zp_z(v)dv G(z)=T(r)=(L?1)∫0z?pz?(v)dv
- 有 s = G ( z ) = T ( r ) s=G(z)=T(r) s=G(z)=T(r),则 z = G ? 1 ( s ) = G ? 1 ( T ( r ) ) z = G^{-1}(s)=G^{-1}(T(r)) z=G?1(s)=G?1(T(r)),得到了原始图像像素到规定化后图像像素的一个应黑色
离散形式:
使用原始图像的像素
 使用目标-规定化后的图像的像素
使用目标-规定化后的图像的像素


3.3 局部直方图处理
方法: 定义一个邻域,并将其中心在水平方向或垂直方向上从一个像素移动到另一个像素。在每个位置,计算该邻域的直方图,使用直方图均衡化或规定化
四、空间滤波
滤波: 修改或抑制图像的规定频率分量
空间滤波: 通过把每个像素的值替换为该像素及其邻域的函数值来修改图像
4.1 线性空间滤波原理
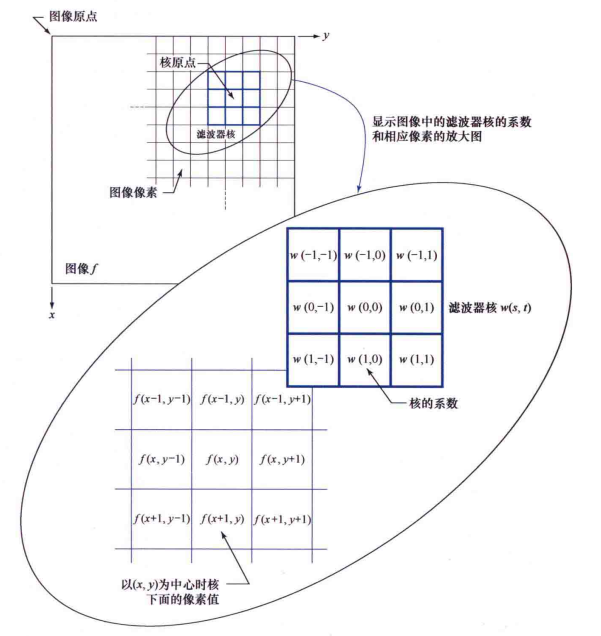
前提: 图像 f f f和滤波器核 w w w
滤波器核 w w w是一个阵列,大小定义了运算的邻域大小,系数决定该滤波器的性质
一般公式: 设核大小为
m
×
n
m \times n
m×n,
m
=
2
a
+
1
,
n
=
2
b
+
1
m=2a+1,n=2b+1
m=2a+1,n=2b+1,a和b为非负整数——此为奇数大小的核
g
(
x
,
y
)
=
∑
s
=
?
a
a
∑
t
=
?
b
b
w
(
s
,
t
)
f
(
x
+
s
,
y
+
t
)
g(x,y) = \sum_{s=-a}^a\sum_{t=-b}^bw(s,t)f(x+s,y+t)
g(x,y)=s=?a∑a?t=?b∑b?w(s,t)f(x+s,y+t)
4.2 空间相关与卷积
相关(Correlation): 在图像上移动核的中心,并且在每个位置计算乘积之和

卷积(Convolution): 把相关运算的核旋转180度

注:
- 当核的值关于其中心对称时,两者结果相同

4.3 可分离滤波器核
二维函数的可分离: 一个二维函数可以写为两个一维函数的乘积,
G
(
x
,
y
)
=
G
1
(
x
)
G
2
(
y
)
G(x,y) = G_1(x)G_2(y)
G(x,y)=G1?(x)G2?(y)
可分离核: 一个核为一个矩阵,可分离意味着该举证可以表示为两个向量的外积,
w
=
c
r
T
w=cr^T
w=crT
如果一个核,可以分解为两个更简单的核,且满足
w
=
w
1
★
w
2
w=w_1\bigstar w_2
w=w1?★w2?,则该可分离核与一幅图像的卷积,等于先跟
w
1
w_1
w1?卷积,再跟
w
2
w_2
w2?卷积

大小为 M × N M \times N M×N的图像与大小为 m × n m \times n m×n的核进行卷积需要进行MNmn次乘法和加法运算,而是用可分离核则只需要MN(m+n)次乘法核加法计算——第一次MNm,第二次MNn
如何证明一个核是可分离的: 该矩阵的秩为1
4.4 空间域滤波与频率域滤波
背景:
- 空间域与频率域之间的联系是傅里叶变换
- 满足一些温和条件的函数(如图像)可以表示为不同频率核振幅的正弦波之和
- 图像的外观依赖于正弦分量的频率
空间域转换到频率域中,进行低通滤波,再返回空间与
五、平滑(低通)空间滤波器
作用: 将第灰度的急剧过渡——降噪、减少图像中的无关细节、平滑因灰度级数量不足导致的图像中的伪轮廓——奶油抹匀了
- 盒式滤波器:核系数相同(通常为1)——可分离
- 低通高斯滤波器:可分离


六、锐化(高通)空间滤波器
作用: 突出灰度中的过渡
类型: 一般可以分为基于一阶导数和二阶导数类型
6.1 基础



6.1 基于一阶导数的锐化滤波器——梯度
6.2 基于二阶导数的锐化滤波器——拉普拉斯
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 第八篇 交叉编译华为云Iot SDK到Orangepi3B
- 解决“bat中文路径乱码“问题
- HTML5+CSS3+JS小实例:可拖拽排序的人物列表
- 2024年北京市安全员-C3证证模拟考试题库及北京市安全员-C3证理论考试试题
- nextsibling方法用法
- js判断是否到T+N的时间限制
- Infobright列存数据库原理介绍
- 一键了解获取网页requests方式
- ISP 基础知识积累
- 计算机基础面试题 |10.精选计算机基础面试题