[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics
本文仅供学习使用
本文参考:
B站:CLEAR_LAB
笔者带更新-运动学
课程主讲教师:
Prof. Wei Zhang
南科大高等机器人控制课 Ch08 Rigid Body Dynamics
1. Spatial Vecocity
Given a rigid body with spatial velocity
V
=
(
ω
?
,
v
?
)
\mathcal{V} =\left( \vec{\omega},\vec{v} \right)
V=(ω,v) , its spatial acceleration (coordinate-free)
A
=
V
˙
=
[
ω
?
˙
v
?
˙
O
]
,
A
=
lim
?
δ
→
0
V
(
t
+
δ
)
?
V
(
t
)
δ
\mathcal{A} =\dot{\mathcal{V}}=\left[ \begin{array}{c} \dot{\vec{\omega}}\\ \dot{\vec{v}}_{\mathrm{O}}\\ \end{array} \right] ,\mathcal{A} =\underset{\delta \rightarrow 0}{\lim}\frac{\mathcal{V} \left( t+\delta \right) -\mathcal{V} \left( t \right)}{\delta}
A=V˙=[ω˙v˙O??],A=δ→0lim?δV(t+δ)?V(t)?
Recall that:
v
?
O
\vec{v}_{\mathrm{O}}
vO? i sthe velocity of the body-fixed particle coincident with frame origin
o
o
o at the current time
t
t
t
Note : ω ? ˙ \dot{\vec{\omega}} ω˙ is the angular acceleration of the body
v ? ˙ O \dot{\vec{v}}_{\mathrm{O}} v˙O? is not the acceleration of any body-fixed point ! v ? O = R ? ˙ q ( t ) , v ? ˙ O ≠ R ? ¨ q ( t ) \vec{v}_{\mathrm{O}}=\dot{\vec{R}}_q\left( t \right) ,\dot{\vec{v}}_{\mathrm{O}}\ne \ddot{\vec{R}}_q\left( t \right) vO?=R˙q?(t),v˙O?=R¨q?(t)
In face, v ? ˙ O \dot{\vec{v}}_{\mathrm{O}} v˙O? gives the rate of change in stream velocity of body-fixed particles passing through o o o
1.1 Spatial vs. Conventional Accel
Suppose
R
?
q
(
t
)
\vec{R}_q\left( t \right)
Rq?(t) is the body fixed particle coincides with
o
o
o at time
t
t
t
So by definition , we have
v
?
O
(
t
)
=
R
?
˙
q
(
t
)
\vec{v}_{\mathrm{O}}\left( t \right) =\dot{\vec{R}}_q\left( t \right)
vO?(t)=R˙q?(t) , however
v
?
˙
O
≠
R
?
¨
q
(
t
)
\dot{\vec{v}}_{\mathrm{O}}\ne \ddot{\vec{R}}_q\left( t \right)
v˙O?=R¨q?(t) , where
R
?
¨
q
(
t
)
\ddot{\vec{R}}_q\left( t \right)
R¨q?(t) is the conventional acceleration of the body-fixed point
q
q
q
At time
t
t
t :
R
?
q
(
t
)
=
0
\vec{R}_q\left( t \right) =0
Rq?(t)=0 ,
v
?
O
(
t
)
=
R
?
˙
q
(
t
)
\vec{v}_{\mathrm{O}}\left( t \right) =\dot{\vec{R}}_q\left( t \right)
vO?(t)=R˙q?(t)
At time
t
+
δ
t+\delta
t+δ :
R
?
q
′
(
t
)
=
0
\vec{R}_{q^{\prime}}\left( t \right) =0
Rq′?(t)=0 ,
v
?
O
(
t
+
δ
)
=
??
R
?
˙
q
′
(
t
+
δ
)
≠
R
?
˙
q
(
t
+
δ
)
\vec{v}_{\mathrm{O}}\left( t+\delta \right) =\,\,\dot{\vec{R}}_{q^{\prime}}\left( t+\delta \right) \ne \dot{\vec{R}}_q\left( t+\delta \right)
vO?(t+δ)=R˙q′?(t+δ)=R˙q?(t+δ) ——
q
′
q^{\prime}
q′ another body-fixed particle
- Note : q q q and q ′ q^{\prime} q′ are different points, lim ? δ → 0 v ? O ( t ) = v ? O ( t + δ ) ? v ? O ( t ) δ = R ? ˙ q ′ ( t + δ ) ? R ? q ( t ) δ \underset{\delta \rightarrow 0}{\lim}\vec{v}_{\mathrm{O}}\left( t \right) =\frac{\vec{v}_{\mathrm{O}}\left( t+\delta \right) -\vec{v}_{\mathrm{O}}\left( t \right)}{\delta}=\frac{\dot{\vec{R}}_{q^{\prime}}\left( t+\delta \right) -\vec{R}_q\left( t \right)}{\delta} δ→0lim?vO?(t)=δvO?(t+δ)?vO?(t)?=δR˙q′?(t+δ)?Rq?(t)?
实际上只需考虑Twist最开始的定义,即速度 v ? O \vec{v}_{\mathrm{O}} vO? 并不是某一点的速度,而是考虑相对坐标系原点而言的虚拟点在该角速度下的瞬时速度( R ? ˙ q ( t ) = v ? O ( t ) + ω ? ( t ) × R ? q ( t ) \dot{\vec{R}}_q\left( t \right) =\vec{v}_{\mathrm{O}}\left( t \right) +\vec{\omega}\left( t \right) \times \vec{R}_q\left( t \right) R˙q?(t)=vO?(t)+ω(t)×Rq?(t)),而与该坐标系所代表的真实点的运动无关( R ? q ( t ) \vec{R}_q\left( t \right) Rq?(t) is the body fixed particle coincides with o o o at time t t t),即为:
R ? ¨ q ( t ) = v ? ˙ O ( t ) + ω ? ˙ ( t ) × R ? q ( t ) ↗ 0 + ω ? ( t ) × R ? ˙ q ( t ) = v ? ˙ O ( t ) + ω ? ( t ) × R ? ˙ q ( t ) \ddot{\vec{R}}_q\left( t \right) =\dot{\vec{v}}_{\mathrm{O}}\left( t \right) +\dot{\vec{\omega}}\left( t \right) \times \vec{R}_q\left( t \right) _{\nearrow 0}+\vec{\omega}\left( t \right) \times \dot{\vec{R}}_q\left( t \right) =\dot{\vec{v}}_{\mathrm{O}}\left( t \right) +\vec{\omega}\left( t \right) \times \dot{\vec{R}}_q\left( t \right) R¨q?(t)=v˙O?(t)+ω˙(t)×Rq?(t)↗0?+ω(t)×R˙q?(t)=v˙O?(t)+ω(t)×R˙q?(t)
1.2 Plueker Coordinate System and Basis Vectors
按照向量的本质理解即可,这也是笔者为啥不是很喜欢旋量的原因。
Recall coordinate-free concept: let R ? ∈ R 3 \vec{R}\in \mathbb{R} ^3 R∈R3 be a free vector with { O } \left\{ O \right\} {O} and { B } \left\{ B \right\} {B} frame coordinate R ? O \vec{R}^O RO and R ? B \vec{R}^B RB
矢量的变换:
旋量的变换:
[
e
B
1
O
e
B
2
O
e
B
3
O
e
B
4
O
e
B
4
O
e
B
5
O
]
6
×
6
=
[
X
B
O
]
=
[
A
d
[
T
B
O
]
]
\left[ \begin{array}{l} e_{\mathrm{B}1}^{O}& e_{\mathrm{B}2}^{O}& e_{\mathrm{B}3}^{O}& e_{\mathrm{B}4}^{O}& e_{\mathrm{B}4}^{O}& e_{\mathrm{B}5}^{O}\\ \end{array} \right] _{6\times 6}=\left[ X_{\mathrm{B}}^{O} \right] =\left[ Ad_{\left[ T_{\mathrm{B}}^{O} \right]} \right]
[eB1O??eB2O??eB3O??eB4O??eB4O??eB5O??]6×6?=[XBO?]=[Ad[TBO?]?]
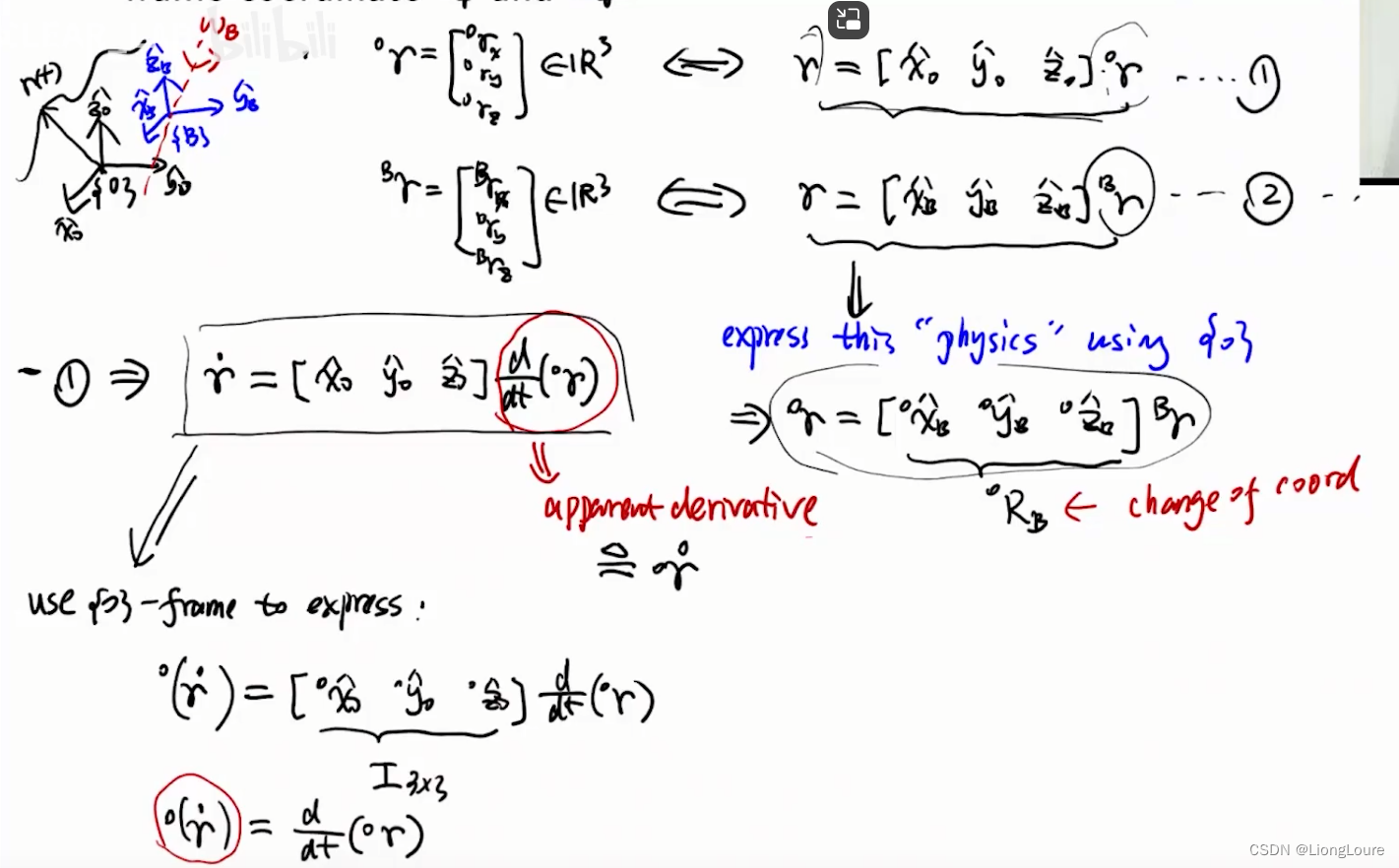
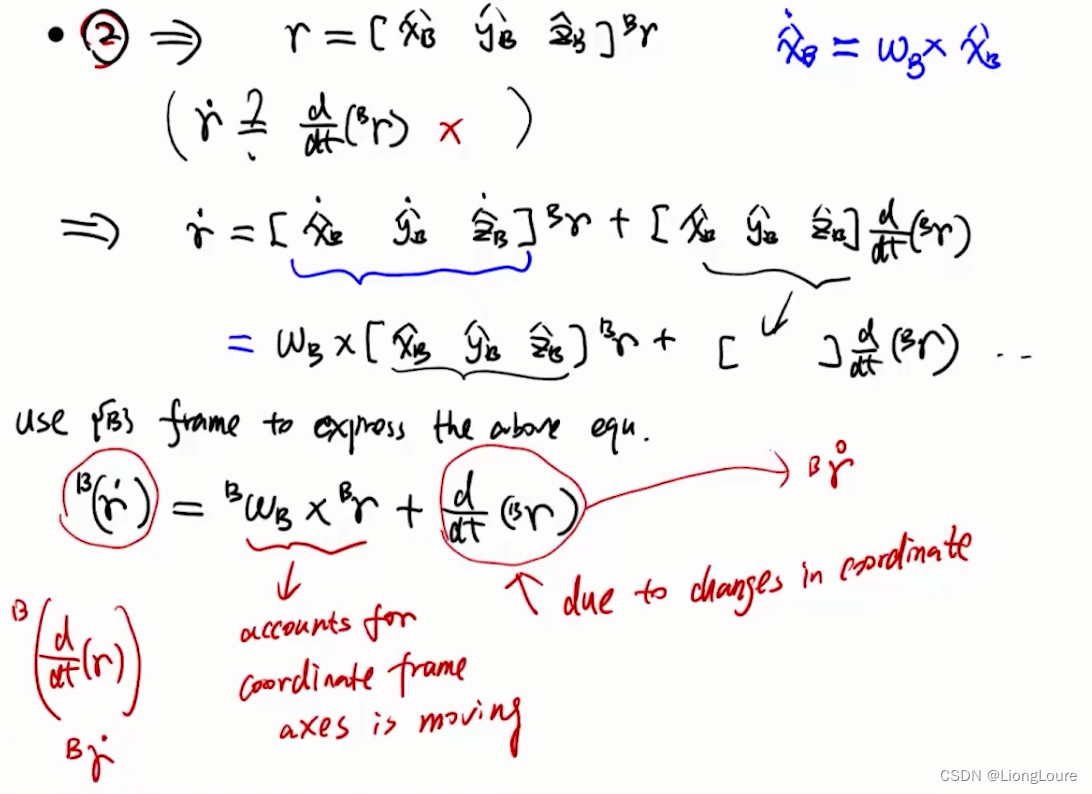
1.3 Work with Moving Reference Frame
Now let’s work with { O } \left\{ O \right\} {O} frame to find the derivative —— we need to compute : [ e ˙ B 1 O e ˙ B 2 O e ˙ B 3 O e ˙ B 4 O e ˙ B 4 O e ˙ B 5 O ] 6 × 6 = [ X ˙ B O ] = d d t [ A d [ T B O ] ] \left[ \begin{array}{l} \dot{e}_{\mathrm{B}1}^{O}& \dot{e}_{\mathrm{B}2}^{O}& \dot{e}_{\mathrm{B}3}^{O}& \dot{e}_{\mathrm{B}4}^{O}& \dot{e}_{\mathrm{B}4}^{O}& \dot{e}_{\mathrm{B}5}^{O}\\ \end{array} \right] _{6\times 6}=\left[ \dot{X}_{\mathrm{B}}^{O} \right] =\frac{\mathrm{d}}{\mathrm{d}t}\left[ Ad_{\left[ T_{\mathrm{B}}^{O} \right]} \right] [e˙B1O??e˙B2O??e˙B3O??e˙B4O??e˙B4O??e˙B5O??]6×6?=[X˙BO?]=dtd?[Ad[TBO?]?]
Let’s denote : [ T B O ] = ( [ Q ] , R ? ) ? d d t ( [ [ Q ] 0 R ? ~ [ Q ] [ Q ] ] ) = [ [ Q ˙ ] 0 ( R ? ~ [ Q ] ) ′ [ Q ˙ ] ] \left[ T_{\mathrm{B}}^{O} \right] =\left( \left[ Q \right] ,\vec{R} \right) \Rightarrow \frac{\mathrm{d}}{\mathrm{d}t}\left( \left[ \begin{matrix} \left[ Q \right]& 0\\ \tilde{\vec{R}}\left[ Q \right]& \left[ Q \right]\\ \end{matrix} \right] \right) =\left[ \begin{matrix} \left[ \dot{Q} \right]& 0\\ \left( \tilde{\vec{R}}\left[ Q \right] \right) ^{\prime}& \left[ \dot{Q} \right]\\ \end{matrix} \right] [TBO?]=([Q],R)?dtd?([[Q]R~[Q]?0[Q]?])= ?[Q˙?](R~[Q])′?0[Q˙?]? ?
{ B } \left\{ B \right\} {B} frame has instantaneous velocity V B = [ ω ? v ? O ] \mathcal{V} _B=\left[ \begin{array}{c} \vec{\omega}\\ \vec{v}_{\mathrm{O}}\\ \end{array} \right] VB?=[ωvO??]
1.4 Derivative of Adjoint
Note : [ Q ˙ ] = ω ? × [ Q ] , R ? ˙ = v ? O + ω ? × R ? , [ Q ] ω ? ~ = [ Q ] ω ? ~ [ Q ] T , ω ? 1 × ω ? 2 ~ = ω ? ~ 1 ω ? ~ 2 ? ω ? ~ 2 ω ? ~ 1 \left[ \dot{Q} \right] =\vec{\omega}\times \left[ Q \right] ,\dot{\vec{R}}=\vec{v}_{\mathrm{O}}+\vec{\omega}\times \vec{R},\widetilde{\left[ Q \right] \vec{\omega}}=\left[ Q \right] \tilde{\vec{\omega}}\left[ Q \right] ^{\mathrm{T}},\widetilde{\vec{\omega}_1\times \vec{\omega}_2}=\tilde{\vec{\omega}}_1\tilde{\vec{\omega}}_2-\tilde{\vec{\omega}}_2\tilde{\vec{\omega}}_1 [Q˙?]=ω×[Q],R˙=vO?+ω×R,[Q]ω ?=[Q]ω~[Q]T,ω1?×ω2? ?=ω~1?ω~2??ω~2?ω~1?(Jacobi’s Identity)
After some computation :
d
d
t
[
A
d
[
T
B
O
]
]
=
[
ω
?
~
0
v
?
~
O
ω
?
~
]
[
A
d
[
T
B
O
]
]
=
[
X
˙
B
O
]
\frac{\mathrm{d}}{\mathrm{d}t}\left[ Ad_{\left[ T_{\mathrm{B}}^{O} \right]} \right] =\left[ \begin{matrix} \tilde{\vec{\omega}}& 0\\ \tilde{\vec{v}}_{\mathrm{O}}& \tilde{\vec{\omega}}\\ \end{matrix} \right] \left[ Ad_{\left[ T_{\mathrm{B}}^{O} \right]} \right] =\left[ \dot{X}_{\mathrm{B}}^{O} \right]
dtd?[Ad[TBO?]?]=[ω~v~O??0ω~?][Ad[TBO?]?]=[X˙BO?]
Define : [ ω ? ~ 0 v ? ~ O ω ? ~ ] = V ~ B \left[ \begin{matrix} \tilde{\vec{\omega}}& 0\\ \tilde{\vec{v}}_{\mathrm{O}}& \tilde{\vec{\omega}}\\ \end{matrix} \right] =\tilde{\mathcal{V}}_B [ω~v~O??0ω~?]=V~B?
{ [ Q ˙ B O ] = ω ? ~ B [ Q B O ] [ X ˙ B O ] = V ~ B [ X ˙ B O ] \begin{cases} \left[ \dot{Q}_{\mathrm{B}}^{O} \right] =\tilde{\vec{\omega}}_B\left[ Q_{\mathrm{B}}^{O} \right]\\ \left[ \dot{X}_{\mathrm{B}}^{O} \right] =\tilde{\mathcal{V}}_B\left[ \dot{X}_{\mathrm{B}}^{O} \right]\\ \end{cases} ? ? ??[Q˙?BO?]=ω~B?[QBO?][X˙BO?]=V~B?[X˙BO?]?
In coordinate free: e ˙ B 1 O = V ~ B e B 1 O \dot{e}_{\mathrm{B}1}^{O}=\tilde{\mathcal{V}}_Be_{\mathrm{B}1}^{O} e˙B1O?=V~B?eB1O?
1.4.1 Spatial Cross Product
Given two spatial velocities(twists)
V
1
\mathcal{V} _1
V1? and
V
2
\mathcal{V} _2
V2? , their spatial product is
V
1
×
V
2
=
[
ω
?
1
v
?
1
O
]
×
[
ω
?
2
v
?
2
O
]
=
[
ω
?
1
×
ω
?
2
ω
?
1
×
v
?
2
O
+
v
?
1
O
×
ω
?
2
]
\mathcal{V} _1\times \mathcal{V} _2=\left[ \begin{array}{c} \vec{\omega}_1\\ {\vec{v}_1}_{\mathrm{O}}\\ \end{array} \right] \times \left[ \begin{array}{c} \vec{\omega}_2\\ {\vec{v}_2}_{\mathrm{O}}\\ \end{array} \right] =\left[ \begin{array}{c} \vec{\omega}_1\times \vec{\omega}_2\\ \vec{\omega}_1\times {\vec{v}_2}_{\mathrm{O}}+{\vec{v}_1}_{\mathrm{O}}\times \vec{\omega}_2\\ \end{array} \right]
V1?×V2?=[ω1?v1?O??]×[ω2?v2?O??]=[ω1?×ω2?ω1?×v2?O?+v1?O?×ω2??]
Matrix representation : V 1 × V 2 = V ~ 1 V 2 , V ~ 1 = [ ω ? ~ 1 0 v ? ~ 1 O ω ? ~ 1 ] \mathcal{V} _1\times \mathcal{V} _2=\tilde{\mathcal{V}}_1\mathcal{V} _2,\tilde{\mathcal{V}}_1=\left[ \begin{matrix} \tilde{\vec{\omega}}_1& 0\\ {\tilde{\vec{v}}_1}_{\mathrm{O}}& \tilde{\vec{\omega}}_1\\ \end{matrix} \right] V1?×V2?=V~1?V2?,V~1?=[ω~1?v~1?O??0ω~1??]
Roughly speaking, when a motion
V
\mathcal{V}
V is moving with a spatial velocity
Z
\mathcal{Z}
Z (e.g. it is attached to a moving frame) but is otherwise not changing , then
V
˙
=
Z
×
V
\dot{\mathcal{V}}=\mathcal{Z} \times \mathcal{V}
V˙=Z×V
- Propertries
Assume A is moving wrt
O
O
O with velocity
V
A
\mathcal{V} _{\mathrm{A}}
VA? :
[
X
˙
A
O
]
=
V
~
A
O
[
X
A
O
]
\left[ \dot{X}_{\mathrm{A}}^{O} \right] =\tilde{\mathcal{V}}_{\mathrm{A}}^{O}\left[ X_{\mathrm{A}}^{O} \right]
[X˙AO?]=V~AO?[XAO?]
[
X
]
V
~
=
[
X
]
V
~
[
X
]
T
\widetilde{\left[ X \right] \mathcal{V} }=\left[ X \right] \tilde{\mathcal{V}}\left[ X \right] ^{\mathrm{T}}
[X]V
?=[X]V~[X]T for any transformation
[
X
]
\left[ X \right]
[X] and twist
V
\mathcal{V}
V
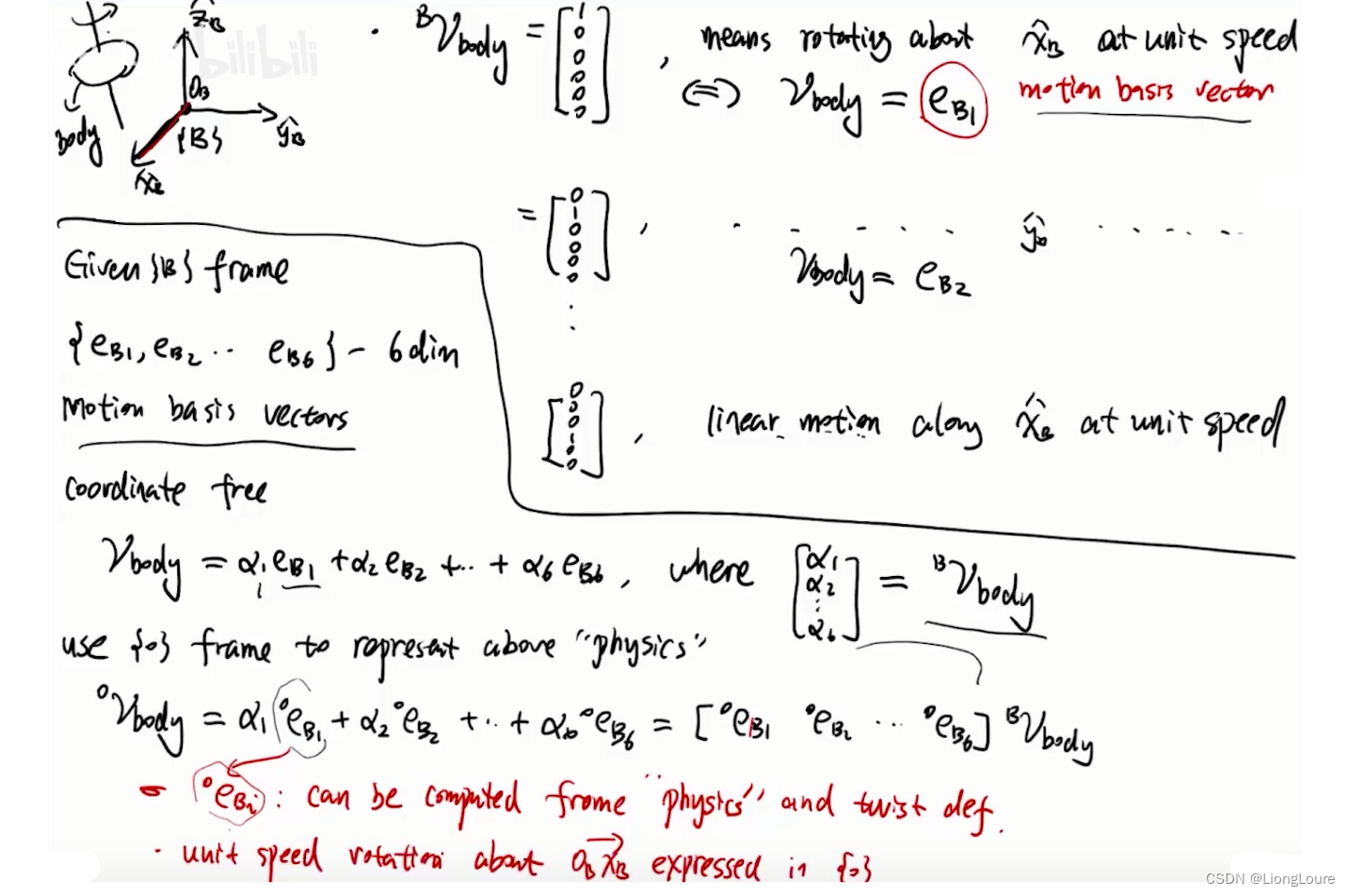
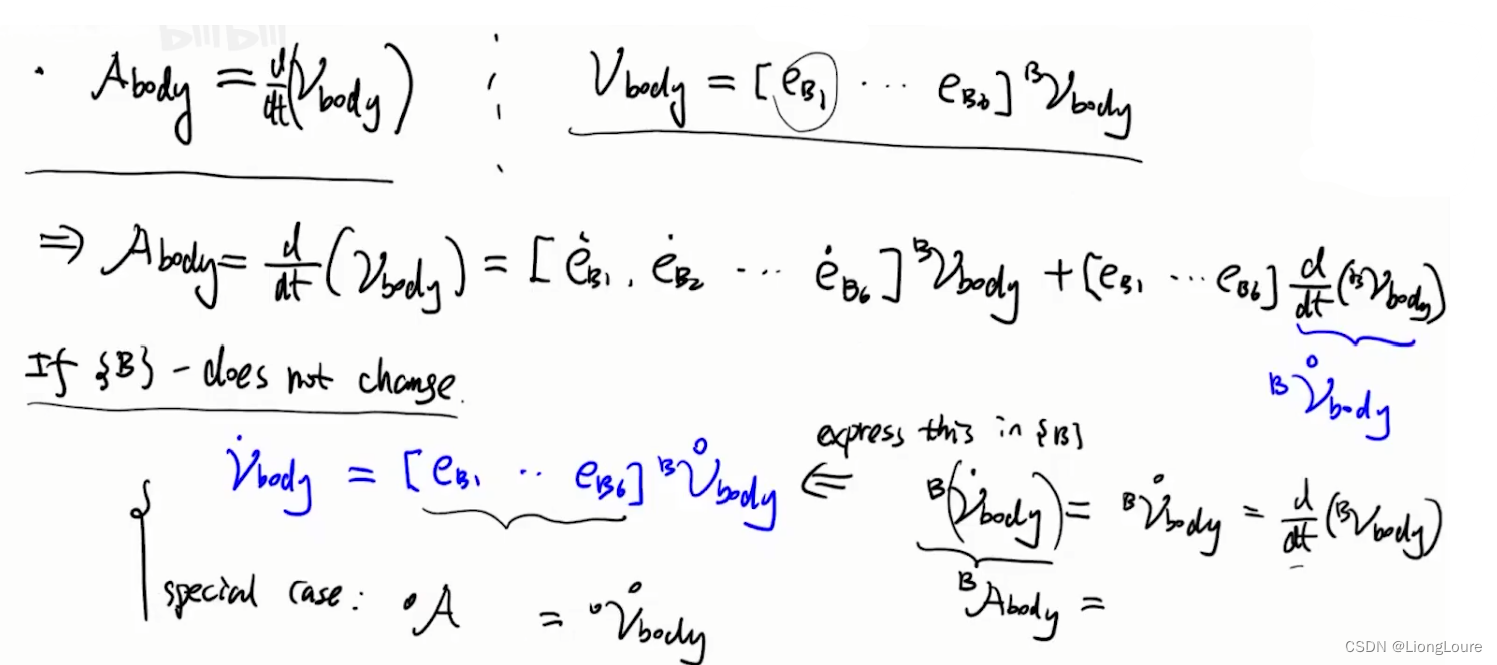
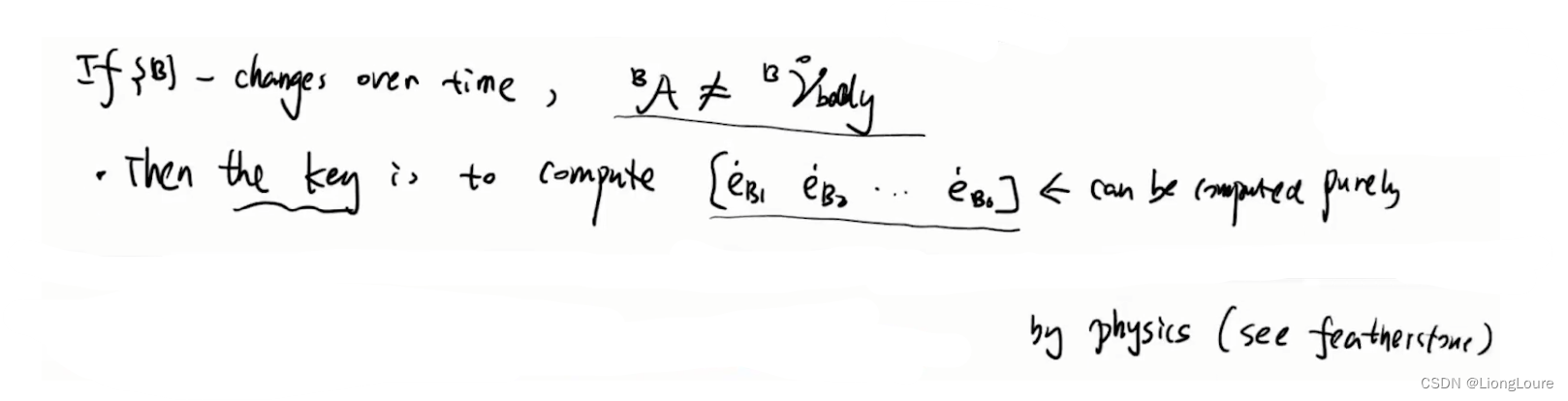
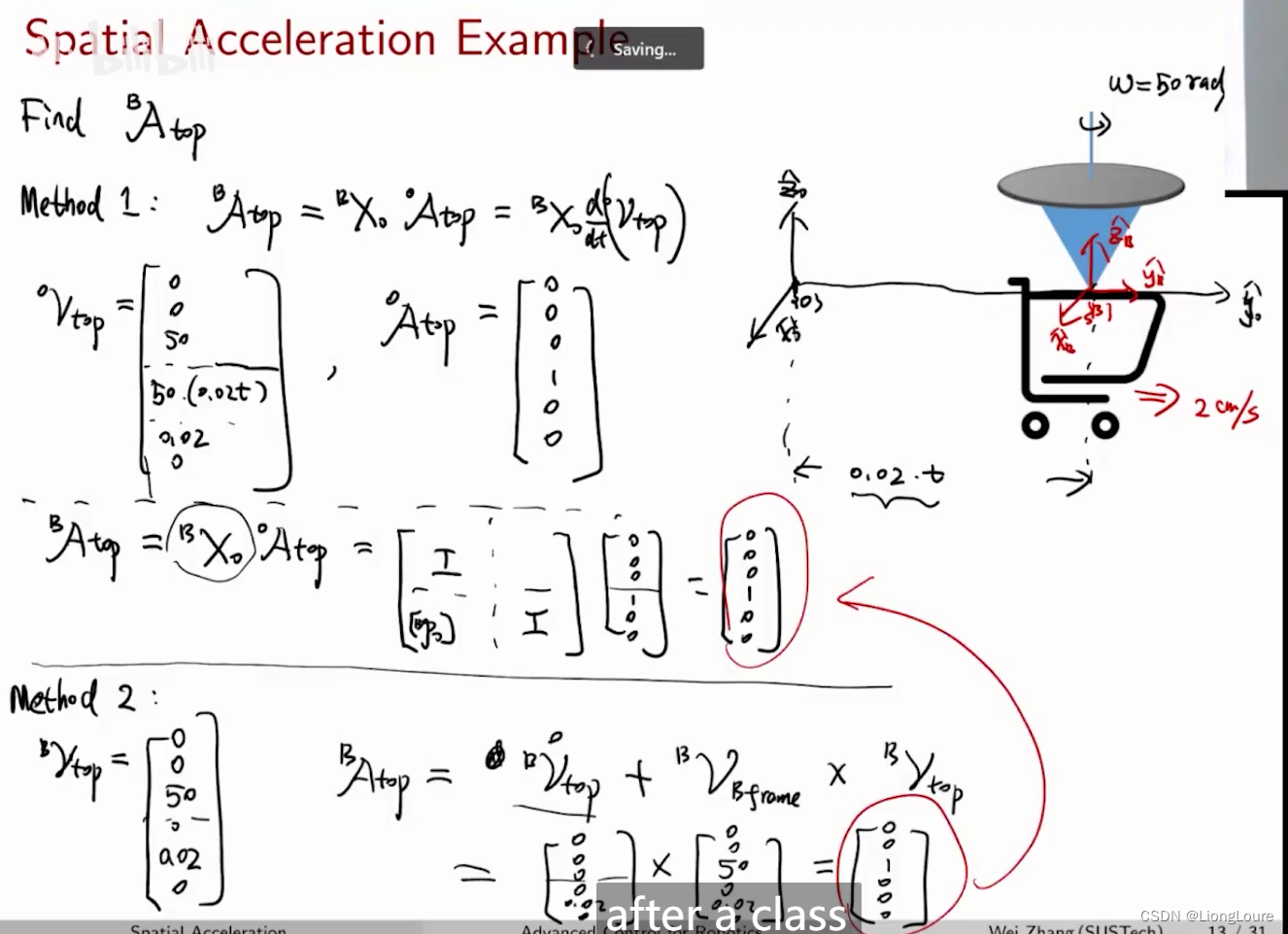
1.4.2 Spatial Acceleration with Moving Reference Frame
Consider a body with velocity
V
B
o
d
y
\mathcal{V} _{\mathrm{Body}}
VBody? (wrt inertia frame), and
V
B
o
d
y
O
\mathcal{V} _{\mathrm{Body}}^{O}
VBodyO? and
V
B
o
d
y
B
\mathcal{V} _{\mathrm{Body}}^{B}
VBodyB? be its Plueker coordinates wrt
{
O
}
\left\{ O \right\}
{O} and
{
B
}
\left\{ B \right\}
{B} :
A
B
o
d
y
B
=
d
d
t
(
V
B
o
d
y
B
)
+
V
~
B
O
B
V
B
o
d
y
B
\mathcal{A} _{\mathrm{Body}}^{B}=\frac{\mathrm{d}}{\mathrm{d}t}\left( \mathcal{V} _{\mathrm{Body}}^{B} \right) +\tilde{\mathcal{V}}_{\mathrm{BO}}^{B}\mathcal{V} _{\mathrm{Body}}^{B}
ABodyB?=dtd?(VBodyB?)+V~BOB?VBodyB?
A
B
o
d
y
O
=
[
X
B
O
]
A
B
o
d
y
B
\mathcal{A} _{\mathrm{Body}}^{O}=\left[ X_{\mathrm{B}}^{O} \right] \mathcal{A} _{\mathrm{Body}}^{B}
ABodyO?=[XBO?]ABodyB?
A B o d y O = d d t ( V B o d y O ) = d d t ( [ X B O ] V B o d y B ) = [ X ˙ B O ] V B o d y B + [ X B O ] V ˙ B o d y B = V ~ B O [ X B O ] V B o d y B + [ X B O ] V ˙ B o d y B = [ X B O ] ( [ X O B ] V ~ B O [ X B O ] V B o d y B + V ˙ B o d y B ) = [ X B O ] ( [ X O B ] V B O ~ V B o d y B + V ˙ B o d y B ) = [ X B O ] ( V ~ B O B V B o d y B + V ˙ B o d y B ) = [ X B O ] A B o d y B \mathcal{A} _{\mathrm{Body}}^{O}=\frac{\mathrm{d}}{\mathrm{d}t}\left( \mathcal{V} _{\mathrm{Body}}^{O} \right) =\frac{\mathrm{d}}{\mathrm{d}t}\left( \left[ X_{\mathrm{B}}^{O} \right] \mathcal{V} _{\mathrm{Body}}^{B} \right) =\left[ \dot{X}_{\mathrm{B}}^{O} \right] \mathcal{V} _{\mathrm{Body}}^{B}+\left[ X_{\mathrm{B}}^{O} \right] \dot{\mathcal{V}}_{\mathrm{Body}}^{B}=\tilde{\mathcal{V}}_{\mathrm{B}}^{O}\left[ X_{\mathrm{B}}^{O} \right] \mathcal{V} _{\mathrm{Body}}^{B}+\left[ X_{\mathrm{B}}^{O} \right] \dot{\mathcal{V}}_{\mathrm{Body}}^{B}=\left[ X_{\mathrm{B}}^{O} \right] \left( \left[ X_{\mathrm{O}}^{B} \right] \tilde{\mathcal{V}}_{\mathrm{B}}^{O}\left[ X_{\mathrm{B}}^{O} \right] \mathcal{V} _{\mathrm{Body}}^{B}+\dot{\mathcal{V}}_{\mathrm{Body}}^{B} \right) =\left[ X_{\mathrm{B}}^{O} \right] \left( \widetilde{\left[ X_{\mathrm{O}}^{B} \right] \mathcal{V} _{\mathrm{B}}^{O}}\mathcal{V} _{\mathrm{Body}}^{B}+\dot{\mathcal{V}}_{\mathrm{Body}}^{B} \right) =\left[ X_{\mathrm{B}}^{O} \right] \left( \tilde{\mathcal{V}}_{\mathrm{BO}}^{B}\mathcal{V} _{\mathrm{Body}}^{B}+\dot{\mathcal{V}}_{\mathrm{Body}}^{B} \right) =\left[ X_{\mathrm{B}}^{O} \right] \mathcal{A} _{\mathrm{Body}}^{B} ABodyO?=dtd?(VBodyO?)=dtd?([XBO?]VBodyB?)=[X˙BO?]VBodyB?+[XBO?]V˙BodyB?=V~BO?[XBO?]VBodyB?+[XBO?]V˙BodyB?=[XBO?]([XOB?]V~BO?[XBO?]VBodyB?+V˙BodyB?)=[XBO?]([XOB?]VBO? ?VBodyB?+V˙BodyB?)=[XBO?](V~BOB?VBodyB?+V˙BodyB?)=[XBO?]ABodyB?
EXAMPLE:
2. Spatial Force(Wrench)
Consider a rigid body with many forces on it and fix an arbitrary point
O
O
O in space

The net effect of these forces can be expressed as:
- A force f f f , acting along a line passing through O O O —— f ? = ∑ f ? i i \vec{f}=\sum{\vec{f}_{\mathrm{i}}}_{\mathrm{i}} f?=∑f?i?i?
- A moment m ? O \vec{m}_{\mathrm{O}} mO? about point O O O —— m ? O = ∑ R ? P i O × f ? i \vec{m}_{\mathrm{O}}=\sum{\vec{R}_{\mathrm{Pi}}^{O}\times \vec{f}_{\mathrm{i}}} mO?=∑RPiO?×f?i?
Spatial Force(Wrench) : is given by the 6D vector
F = [ m ? O f ? ] \mathcal{F} =\left[ \begin{array}{c} \vec{m}_{\mathrm{O}}\\ \vec{f}\\ \end{array} \right] F=[mO?f??]
What is we choose reference point to
Q
Q
Q?
m
?
Q
=
∑
R
?
P
i
Q
×
f
?
i
=
∑
(
R
?
O
Q
+
R
?
P
i
O
)
×
f
?
i
=
m
?
O
+
∑
R
?
O
Q
×
f
?
i
\vec{m}_{\mathrm{Q}}=\sum{\vec{R}_{\mathrm{Pi}}^{Q}\times \vec{f}_{\mathrm{i}}}=\sum{\left( \vec{R}_{\mathrm{O}}^{Q}+\vec{R}_{\mathrm{Pi}}^{O} \right) \times \vec{f}_{\mathrm{i}}}=\vec{m}_{\mathrm{O}}+\sum{\vec{R}_{\mathrm{O}}^{Q}\times \vec{f}_{\mathrm{i}}}
mQ?=∑RPiQ?×f?i?=∑(ROQ?+RPiO?)×f?i?=mO?+∑ROQ?×f?i?
2.1 Spatial Force in Pluecker Coordinate Systems
Given a frame { A } \left\{ A \right\} {A}, the Plueker coordinate of a spatial force F \mathcal{F} F is given by F A = [ m ? O A f ? A ] \mathcal{F} ^A=\left[ \begin{array}{c} \vec{m}_{\mathrm{O}}^{A}\\ \vec{f}^A\\ \end{array} \right] FA=[mOA?f?A?]
Coordinate transform :
{
f
?
A
=
[
Q
B
A
]
f
?
B
m
?
O
A
=
[
Q
B
A
]
m
?
O
B
+
R
?
B
A
×
[
Q
B
A
]
f
?
B
?
F
A
=
[
X
B
A
]
T
F
B
=
[
X
B
A
]
?
F
B
\begin{cases} \vec{f}^A=\left[ Q_{\mathrm{B}}^{A} \right] \vec{f}^B\\ \vec{m}_{\mathrm{O}}^{A}=\left[ Q_{\mathrm{B}}^{A} \right] \vec{m}_{\mathrm{O}}^{B}+\vec{R}_{\mathrm{B}}^{A}\times \left[ Q_{\mathrm{B}}^{A} \right] \vec{f}^B\\ \end{cases}\Rightarrow \mathcal{F} ^A=\left[ X_{\mathrm{B}}^{A} \right] ^{\mathrm{T}}\mathcal{F} ^B=\left[ X_{\mathrm{B}}^{A} \right] ^*\mathcal{F} ^B
{f?A=[QBA?]f?BmOA?=[QBA?]mOB?+RBA?×[QBA?]f?B??FA=[XBA?]TFB=[XBA?]?FB
2.2 Wrench-Twist Pair and Power
Recall that for a point mass with linear velocity v ? \vec{v} v and a linear force f ? \vec{f} f? . Then we know that the power (instantaneous work done by f ? \vec{f} f? ) is given by : f ? ? v ? = f ? T v ? \vec{f}\cdot \vec{v}=\vec{f}^{\mathrm{T}}\vec{v} f??v=f?Tv
This relation can be generalized to spatial force (i.e. wrench) and spatial velocity (i.e. twist)
Suppose a rigid body has a twist
V
A
=
(
ω
?
A
,
v
?
O
A
)
\mathcal{V} ^A=\left( \vec{\omega}^A,\vec{v}_{\mathrm{O}}^{A} \right)
VA=(ωA,vOA?) and a wrench
F
A
=
(
m
?
O
A
,
f
?
A
)
\mathcal{F} ^A=\left( \vec{m}_{\mathrm{O}}^{A},\vec{f}^A \right)
FA=(mOA?,f?A) acts on the body. Then the power is simply
P
=
(
V
A
)
T
F
A
=
(
F
A
)
T
V
A
=
(
ω
?
A
)
T
m
?
O
A
+
(
v
?
O
A
)
T
f
?
A
P=\left( \mathcal{V} ^A \right) ^{\mathrm{T}}\mathcal{F} ^A=\left( \mathcal{F} ^A \right) ^{\mathrm{T}}\mathcal{V} ^A=\left( \vec{\omega}^A \right) ^{\mathrm{T}}\vec{m}_{\mathrm{O}}^{A}+\left( \vec{v}_{\mathrm{O}}^{A} \right) ^{\mathrm{T}}\vec{f}^A
P=(VA)TFA=(FA)TVA=(ωA)TmOA?+(vOA?)Tf?A
2.3 Joint Torque
Consider a link attached to a 1-dof joint(r.g. revolute or prismatic). be the screw axis of the joint. Then the power produced by the joint is V = S ^ θ ˙ \mathcal{V} =\hat{\mathcal{S}}\dot{\theta} V=S^θ˙
F \mathcal{F} F be the wrench provided by the joint. Then the power produced by the joint is P = ( V ) T F = ( S ^ θ ˙ ) T F = ( S ^ T F ) θ ˙ = τ θ ˙ P=\left( \mathcal{V} \right) ^{\mathrm{T}}\mathcal{F} =\left( \hat{\mathcal{S}}\dot{\theta} \right) ^{\mathrm{T}}\mathcal{F} =\left( \hat{\mathcal{S}}^{\mathrm{T}}\mathcal{F} \right) \dot{\theta}=\tau \dot{\theta} P=(V)TF=(S^θ˙)TF=(S^TF)θ˙=τθ˙
τ = S ^ T F = F T S ^ \tau =\hat{\mathcal{S}}^{\mathrm{T}}\mathcal{F} =\mathcal{F} ^{\mathrm{T}}\hat{\mathcal{S}} τ=S^TF=FTS^ is the projection of the wrench onto the screw axis, i.e. the effective part of the wrench
Often times, τ \tau τ is referred to as joint “torque” or generalized force
3. Spatial Momentum
笔者待整理: 链接
3.1 Rotational Interial
- Recall momentum for point mass:
笔者待整理: 链接
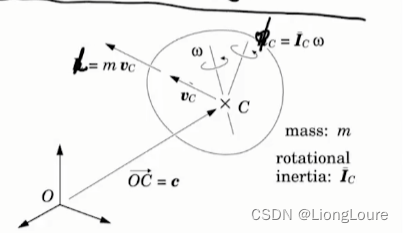
H = [ h ? p ? ] ∈ R 6 \mathcal{H} =\left[ \begin{array}{c} \vec{h}\\ \vec{p}\\ \end{array} \right] \in \mathbb{R} ^6 H=[hp??]∈R6
3.2 Change Reference for Momentum
- Spatial momentum transforms in the same way as spatial forces:
H A = [ X C A ] ? H C \mathcal{H} ^A=\left[ X_{\mathrm{C}}^{A} \right] ^*\mathcal{H} ^C HA=[XCA?]?HC
H C = [ h ? B o d y / C C p ? C ] , H A = [ h ? A A p ? A ] = [ [ Q C A ] h ? B o d y / C C ? R ? ~ C A [ Q C A ] p ? C [ Q C A ] p ? C ] = [ [ Q C A ] ? R ? ~ C A [ Q C A ] 0 [ Q C A ] ] [ h ? B o d y / C C p ? C ] = [ X C A ] ? [ h ? B o d y / C C p ? C ] \mathcal{H} ^C=\left[ \begin{array}{c} \vec{h}_{\mathrm{Body}/\mathrm{C}}^{C}\\ \vec{p}^C\\ \end{array} \right] ,\mathcal{H} ^A=\left[ \begin{array}{c} \vec{h}_{\mathrm{A}}^{A}\\ \vec{p}^A\\ \end{array} \right] =\left[ \begin{array}{c} \left[ Q_{\mathrm{C}}^{A} \right] \vec{h}_{\mathrm{Body}/\mathrm{C}}^{C}-\tilde{\vec{R}}_{\mathrm{C}}^{A}\left[ Q_{\mathrm{C}}^{A} \right] \vec{p}^C\\ \left[ Q_{\mathrm{C}}^{A} \right] \vec{p}^C\\ \end{array} \right] =\left[ \begin{matrix} \left[ Q_{\mathrm{C}}^{A} \right]& -\tilde{\vec{R}}_{\mathrm{C}}^{A}\left[ Q_{\mathrm{C}}^{A} \right]\\ 0& \left[ Q_{\mathrm{C}}^{A} \right]\\ \end{matrix} \right] \left[ \begin{array}{c} \vec{h}_{\mathrm{Body}/\mathrm{C}}^{C}\\ \vec{p}^C\\ \end{array} \right] =\left[ X_{\mathrm{C}}^{A} \right] ^*\left[ \begin{array}{c} \vec{h}_{\mathrm{Body}/\mathrm{C}}^{C}\\ \vec{p}^C\\ \end{array} \right] HC=[hBody/CC?p?C?],HA=[hAA?p?A?]=[[QCA?]hBody/CC??R~CA?[QCA?]p?C[QCA?]p?C?]=[[QCA?]0??R~CA?[QCA?][QCA?]?][hBody/CC?p?C?]=[XCA?]?[hBody/CC?p?C?]
3.3 Spatial Inertia
Inertia of a rigid body defines linear relationship between velocity and momentum
Spacial inertia
I
\mathcal{I}
I is the one such that
H
=
I
V
\mathcal{H} =\mathcal{I} \mathcal{V}
H=IV
Let
{
M
}
\left\{ M \right\}
{M} be a frame whose origin coincide with CoM. Then
I
B
o
d
y
/
C
o
M
M
=
[
I
B
o
d
y
/
C
o
M
M
0
0
m
t
o
t
a
l
E
3
×
3
]
G
\mathcal{I} _{\mathrm{Body}/\mathrm{CoM}}^{M}=\left[ \begin{matrix} I_{\mathrm{Body}/\mathrm{CoM}}^{M}& 0\\ 0& m_{\mathrm{total}}E_{3\times 3}\\ \end{matrix} \right] G
IBody/CoMM?=[IBody/CoMM?0?0mtotal?E3×3??]G
- Spatial inertia wrt another frame
{
F
}
\left\{ F \right\}
{F}:
I F = [ X M F ] ? I M [ X F M ] \mathcal{I} ^F=\left[ X_{\mathrm{M}}^{F} \right] ^*\mathcal{I} ^M\left[ X_{\mathrm{F}}^{M} \right] IF=[XMF?]?IM[XFM?]
Special case : [ Q F M ] = E 3 × 3 \left[ Q_{\mathrm{F}}^{M} \right] =E_{3\times 3} [QFM?]=E3×3?
[ X M F ] = [ E 3 × 3 0 R ? ~ M F E 3 × 3 ] ? I F = [ I M + m t o t a l R ? ~ M F T R ? ~ M F m t o t a l R ? ~ M F m t o t a l R ? ~ M F m t o t a l E 3 × 3 ] \left[ X_{\mathrm{M}}^{F} \right] =\left[ \begin{matrix} E_{3\times 3}& 0\\ \tilde{\vec{R}}_{\mathrm{M}}^{F}& E_{3\times 3}\\ \end{matrix} \right] \Rightarrow \mathcal{I} ^F=\left[ \begin{matrix} \mathcal{I} ^M+m_{\mathrm{total}}{\tilde{\vec{R}}_{\mathrm{M}}^{F}}^{\mathrm{T}}\tilde{\vec{R}}_{\mathrm{M}}^{F}& m_{\mathrm{total}}\tilde{\vec{R}}_{\mathrm{M}}^{F}\\ m_{\mathrm{total}}\tilde{\vec{R}}_{\mathrm{M}}^{F}& m_{\mathrm{total}}E_{3\times 3}\\ \end{matrix} \right] [XMF?]=[E3×3?R~MF??0E3×3??]?IF= ?IM+mtotal?R~MF?TR~MF?mtotal?R~MF??mtotal?R~MF?mtotal?E3×3?? ?
4. Newton-Euler Equation using Spatial Vectors
4.1 Cross Product for Spatial Force and Momentum
Assume frame
A
A
A is moving with velocity
V
A
A
\mathcal{V} _{\mathrm{A}}^{A}
VAA?
(
d
d
t
F
)
A
=
d
d
t
F
A
+
V
A
×
?
F
A
\left( \frac{\mathrm{d}}{\mathrm{d}t}\mathcal{F} \right) ^A=\frac{\mathrm{d}}{\mathrm{d}t}\mathcal{F} ^A+\mathcal{V} ^A\times ^*\mathcal{F} ^A
(dtd?F)A=dtd?FA+VA×?FA
(
d
d
t
H
)
A
=
d
d
t
H
A
+
V
A
×
?
H
A
\left( \frac{\mathrm{d}}{\mathrm{d}t}\mathcal{H} \right) ^A=\frac{\mathrm{d}}{\mathrm{d}t}\mathcal{H} ^A+\mathcal{V} ^A\times ^*\mathcal{H} ^A
(dtd?H)A=dtd?HA+VA×?HA
where × ? \times ^* ×? defined as V = [ ω ? v ? ] , F = [ m ? f ? ] , V × ? F = [ ω ? ~ m ? + v ? ~ f ? ω ? ~ f ? ] \mathcal{V} =\left[ \begin{array}{c} \vec{\omega}\\ \vec{v}\\ \end{array} \right] ,\mathcal{F} =\left[ \begin{array}{c} \vec{m}\\ \vec{f}\\ \end{array} \right] ,\mathcal{V} \times ^*\mathcal{F} =\left[ \begin{array}{c} \tilde{\vec{\omega}}\vec{m}+\tilde{\vec{v}}\vec{f}\\ \tilde{\vec{\omega}}\vec{f}\\ \end{array} \right] V=[ωv?],F=[mf??],V×?F=[ω~m+v~f?ω~f??], or equivately V × ? ~ = [ ω ? ~ v ? ~ 0 ω ? ~ ] \widetilde{\mathcal{V} \times ^*}=\left[ \begin{matrix} \tilde{\vec{\omega}}& \tilde{\vec{v}}\\ 0& \tilde{\vec{\omega}}\\ \end{matrix} \right] V×? ?=[ω~0?v~ω~?]
Fact : V × ? ~ = V ~ T \widetilde{\mathcal{V} \times ^*}=\tilde{\mathcal{V}}^{\mathrm{T}} V×? ?=V~T
4.2 Newton-Euler Equation
- Newton-Euler equation :
F = d d t H = I A + V ~ T I V \mathcal{F} =\frac{\mathrm{d}}{\mathrm{d}t}\mathcal{H} =\mathcal{I} \mathcal{A} +\tilde{\mathcal{V}}^{\mathrm{T}}\mathcal{I} \mathcal{V} F=dtd?H=IA+V~TIV
(due to velocity is changing and account for the face that inertia is moving)
Adopting spatial vectors, the Newton-Euler equation has the same form in any frame
4.3 Derivations of Newton-Euler Equation
d d t H O = d d t ( I O V O ) = I ˙ O V O + I O A O = d d t ( [ X B O ] ? I B [ X O B ] ) V O + I O A O = [ X ˙ B O ] ? I B [ X O B ] V O + [ X B O ] ? I B [ X ˙ O B ] V O + I O A O = V ~ B O T [ X B O ] ? I B [ X O B ] V O ? [ X B O ] ? I B [ X O B ] V ~ B O T V O ↗ 0 + I O A O = V ~ B O T I O V O + I O A O \frac{\mathrm{d}}{\mathrm{d}t}\mathcal{H} ^O=\frac{\mathrm{d}}{\mathrm{d}t}\left( \mathcal{I} ^O\mathcal{V} ^O \right) =\dot{\mathcal{I}}^O\mathcal{V} ^O+\mathcal{I} ^O\mathcal{A} ^O=\frac{\mathrm{d}}{\mathrm{d}t}\left( \left[ X_{\mathrm{B}}^{O} \right] ^*\mathcal{I} ^B\left[ X_{\mathrm{O}}^{B} \right] \right) \mathcal{V} ^O+\mathcal{I} ^O\mathcal{A} ^O \\ =\left[ \dot{X}_{\mathrm{B}}^{O} \right] ^*\mathcal{I} ^B\left[ X_{\mathrm{O}}^{B} \right] \mathcal{V} ^O+\left[ X_{\mathrm{B}}^{O} \right] ^*\mathcal{I} ^B\left[ \dot{X}_{\mathrm{O}}^{B} \right] \mathcal{V} ^O+\mathcal{I} ^O\mathcal{A} ^O \\ ={\tilde{\mathcal{V}}_{\mathrm{B}}^{O}}^{\mathrm{T}}\left[ X_{\mathrm{B}}^{O} \right] ^*\mathcal{I} ^B\left[ X_{\mathrm{O}}^{B} \right] \mathcal{V} ^O-\left[ X_{\mathrm{B}}^{O} \right] ^*\mathcal{I} ^B\left[ X_{\mathrm{O}}^{B} \right] {\tilde{\mathcal{V}}_{\mathrm{B}}^{O}}^{\mathrm{T}}{\mathcal{V} ^O}_{\nearrow 0}+\mathcal{I} ^O\mathcal{A} ^O \\ ={\tilde{\mathcal{V}}_{\mathrm{B}}^{O}}^{\mathrm{T}}\mathcal{I} ^O\mathcal{V} ^O+\mathcal{I} ^O\mathcal{A} ^O dtd?HO=dtd?(IOVO)=I˙OVO+IOAO=dtd?([XBO?]?IB[XOB?])VO+IOAO=[X˙BO?]?IB[XOB?]VO+[XBO?]?IB[X˙OB?]VO+IOAO=V~BO?T[XBO?]?IB[XOB?]VO?[XBO?]?IB[XOB?]V~BO?TVO↗0?+IOAO=V~BO?TIOVO+IOAO
Note :
{ [ X ˙ B O ] = V ~ B O [ X B O ] [ X B O ] [ X O B ] = E ? [ X ˙ B O ] [ X O B ] + [ X B O ] [ X ˙ O B ] = 0 ? [ X ˙ O B ] = ? [ X O B ] [ X ˙ B O ] [ X O B ] = ? [ X O B ] V ~ B O \begin{cases} \left[ \dot{X}_{\mathrm{B}}^{O} \right] =\tilde{\mathcal{V}}_{\mathrm{B}}^{O}\left[ X_{\mathrm{B}}^{O} \right]\\ \left[ X_{\mathrm{B}}^{O} \right] \left[ X_{\mathrm{O}}^{B} \right] =E\\ \end{cases}\Rightarrow \left[ \dot{X}_{\mathrm{B}}^{O} \right] \left[ X_{\mathrm{O}}^{B} \right] +\left[ X_{\mathrm{B}}^{O} \right] \left[ \dot{X}_{\mathrm{O}}^{B} \right] =0\Rightarrow \left[ \dot{X}_{\mathrm{O}}^{B} \right] =-\left[ X_{\mathrm{O}}^{B} \right] \left[ \dot{X}_{\mathrm{B}}^{O} \right] \left[ X_{\mathrm{O}}^{B} \right] =-\left[ X_{\mathrm{O}}^{B} \right] \tilde{\mathcal{V}}_{\mathrm{B}}^{O} {[X˙BO?]=V~BO?[XBO?][XBO?][XOB?]=E??[X˙BO?][XOB?]+[XBO?][X˙OB?]=0?[X˙OB?]=?[XOB?][X˙BO?][XOB?]=?[XOB?]V~BO?
Frame B is attached to the body , V B = V B o d y , I B \mathcal{V} _B=\mathcal{V} _{Body},\mathcal{I} ^B VB?=VBody?,IB is constant
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!